
技术摘要:
本申请的实施例提供了一种旋挖钻机CFA工法的钻头深度测定方法及相关装置,涉及深度测定领域。该方法包括:在旋挖钻机进行钻进施工的过程中,获取动力头与桅杆的第一相对位移;在旋挖钻机进行钻杆伸缩的过程中,获取动力头与桅杆的第二相对位移;根据第一相对位移和第二 全部
背景技术:
旋挖钻机是一种适合建筑基础工程中成孔作业的施工机械。主要适于砂土、粘性 土、粉质土等土层施工,在灌注桩、连续墙、基础加固等多种地基基础施工中得到广泛应用。 旋挖钻机是通过动力头为钻杆提供动力,让钻杆的钻头回转破碎岩土,实现钻进 施工。但是目前无法简单准确地测量出钻头的钻进深度,这不利于操作员的作业。
技术实现要素:
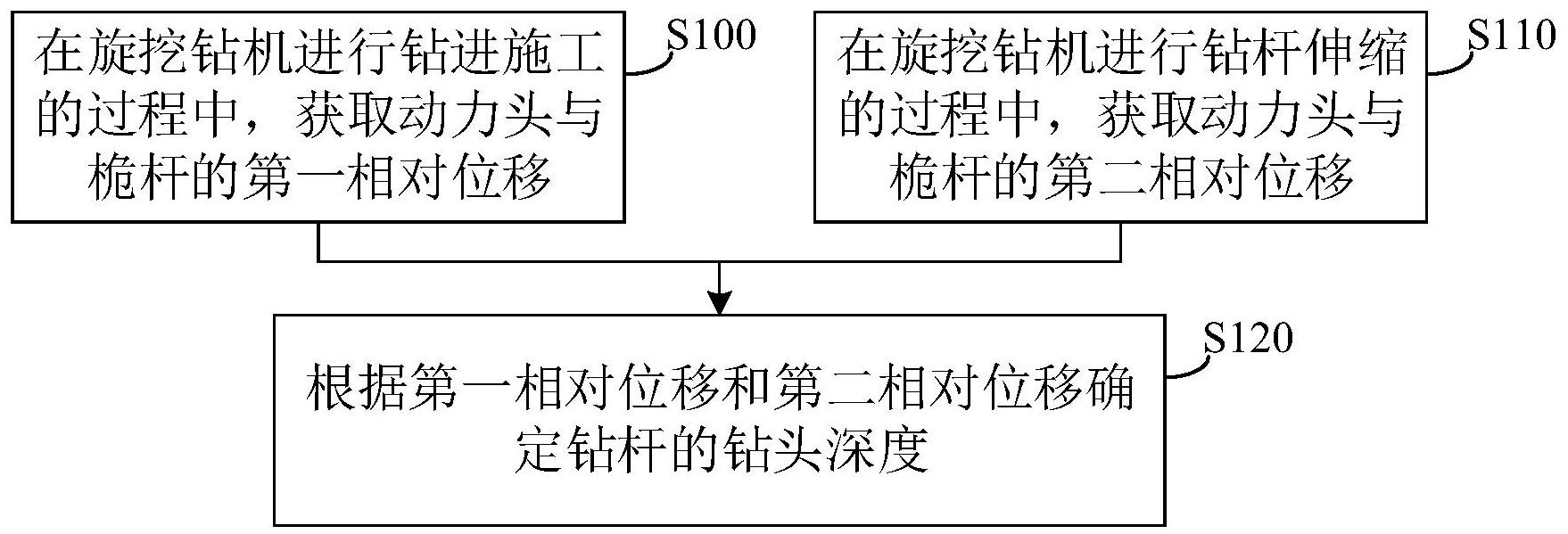
本申请的目的包括,例如,提供了一种旋挖钻机CFA工法的钻头深度测定方法及相 关装置,其能够简单准确地测量出钻头的钻进深度。 本申请的实施例可以这样实现: 第一方面,本申请实施例提供一种旋挖钻机CFA工法的钻头深度测定方法,应用于 使用CFA工法的旋挖钻机的控制器,所述旋挖钻机包括动力头、桅杆以及钻杆,所述方法包 括: 在所述旋挖钻机进行钻进施工的过程中,获取所述动力头与所述桅杆的第一相对 位移; 在所述旋挖钻机进行钻杆伸缩的过程中,获取所述动力头与所述桅杆的第二相对 位移; 根据所述第一相对位移和所述第二相对位移确定所述钻杆的钻头深度。 在可选的实施方式中,所述在所述旋挖钻机进行钻进施工的过程中,获取所述动 力头与所述桅杆的第一相对位移的步骤包括: 当所述钻杆放至工作面时,获取所述动力头在所述桅杆上的第一位置; 在所述旋挖钻机进行钻进施工的过程中,获取所述动力头在所述桅杆上的第二位 置; 根据所述第一位置和所述第二位置确定所述动力头与所述桅杆的第一相对位移。 在可选的实施方式中,所述当所述钻杆放至工作面时,获取所述动力头在所述桅 杆上的第一位置的步骤包括: 响应操作员的第一操作指令,获取所述动力头在所述桅杆上的第一位置。 在可选的实施方式中,所述在所述旋挖钻机进行钻杆伸缩的过程中,获取所述动 力头与所述桅杆的第二相对位移的步骤包括: 在所述旋挖钻机进行钻杆伸缩的开始时刻,获取所述动力头在所述桅杆上的第三 位置; 在所述旋挖钻机进行钻杆伸缩的结束时刻,获取所述动力头在所述桅杆上的第四 4 CN 111594145 A 说 明 书 2/8 页 位置; 根据所述第三位置和所述第四位置确定所述动力头与所述桅杆的第二相对位移。 在可选的实施方式中,所述在所述旋挖钻机进行钻杆伸缩的开始时刻,获取所述 动力头在所述桅杆上的第三位置的步骤包括: 响应操作员的第二操作指令,获取所述动力头在所述桅杆上的第三位置; 所述在所述旋挖钻机进行钻杆伸缩的结束时刻,获取所述动力头在所述桅杆上的 第四位置的步骤包括: 响应操作员的第三操作指令,获取所述动力头在所述桅杆上的第四位置。 第二方面,本申请实施例提供一种旋挖钻机CFA工法的钻头深度测定装置,应用于 使用CFA工法的旋挖钻机的控制器,所述旋挖钻机包括动力头、桅杆以及钻杆,所述装置包 括: 获取模块,用于在所述旋挖钻机进行钻进施工的过程中,获取所述动力头与所述 桅杆的第一相对位移; 所述获取模块,还用于在所述旋挖钻机进行钻杆伸缩的过程中,获取所述动力头 与所述桅杆的第二相对位移; 测定模块,用于根据所述第一相对位移和所述第二相对位移确定所述钻杆的钻头 深度。 在可选的实施方式中,所述获取模块用于当所述钻杆放至工作面时,获取所述动 力头在所述桅杆上的第一位置; 所述获取模块还用于在所述旋挖钻机进行钻进施工的过程中,获取所述动力头在 所述桅杆上的第二位置; 所述获取模块还用于根据所述第一位置和所述第二位置确定所述动力头与所述 桅杆的第一相对位移。 在可选的实施方式中,所述获取模块用于响应操作员的第一操作指令,获取所述 动力头在所述桅杆上的第一位置。 第三方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序, 所述计算机程序被处理器执行时实现前述实施方式中任一项所述的方法。 第四方面,本申请实施例提供一种旋挖钻机的控制器,包括处理器和存储器,所述 存储器存储有机器可读指令,所述处理器用于执行所述机器可读指令,以实现前述实施方 式中任一项所述的方法。 本申请实施例的有益效果包括:由于获取动力头与桅杆的第一相对位移以及获取 动力头与桅杆的第二相对位移的过程是简单且准确的,进而根据第一相对位移和第二相对 位移能够简单且准确地确定出的钻杆的钻头深度。故本申请实施例能够简单准确地测量出 钻头的钻进深度。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 5 CN 111594145 A 说 明 书 3/8 页 些附图获得其他相关的附图。 图1为本申请实施例所提供的控制器的一种结构框图; 图2为本申请实施例提供的旋挖钻机CFA工法的钻头深度测定方法的一种流程图; 图3为本申请实施例提供的旋挖钻机CFA工法的钻头深度测定方法的另一种流程 图; 图4为本申请实施例提供的旋挖钻机在钻进施工过程中的一种场景示意图; 图5为本申请实施例提供的旋挖钻机在钻进施工过程中的另一种场景示意图; 图6为本申请实施例提供的旋挖钻机CFA工法的钻头深度测定方法的另一种流程 图; 图7为本申请实施例提供的旋挖钻机在钻进施工过程中的另一种场景示意图; 图8为本申请实施例提供的旋挖钻机CFA工法的钻头深度测定装置的一种功能模 块图。 图标:100-旋挖钻机;110-钻杆;111-钻头;120-动力头;130-桅杆;140-控制器; 141-存储器;142-处理器;143-总线;144-通信接口;200-旋挖钻机CFA工法的钻头深度测定 装置;210-获取模块;220-测定模块。











