
技术摘要:
本发明公开了一种输电线路沿防坠轨道爬塔机器人及方法,机器人包括上提装置、下推装置和铰接机构;上提装置包括浮动架、伸缩缸和上提桁架,上提桁架卡合于防坠轨道上、顶部与伸缩缸铰接,伸缩缸的另一端与浮动架相连,浮动架与铰接机构铰接;下推装置包括滑动座、伸缩 全部
背景技术:
输电线路主要由导线、绝缘子、杆塔、避雷线和接地装置组成。杆塔主要起到支撑 作用,输电线路杆塔按材料分为铁塔和砼塔,铁塔在输电线路上的使用占比高达80%以上, 特别是500kV及以上线路目前占到100%。 在线路运维检修中,触电与高空坠落是危害人身安全的两大主要因素。随着电网 建设的迅速发展,铁塔的呼高越来越高,特高压线路的平均呼高达到70米以上,上塔作业时 爬塔需耗费大量的体力和时间,使作业人员体力越来越难以满足作业需求,如何节省爬塔 耗费的体力以及保证爬塔安全成为了作业过程中至关重要的环节。 铁塔一般分为角钢塔和钢管塔两种,传统的登高方式,靠在角钢两侧设计脚钉或 在钢管塔装设爬梯上手攀爬,易发生高空坠落,危及作业人员生命安全。机器人载人上塔, 就必须找寻到不同铁塔的特征,提高机器人作业效率,角钢塔由主材、斜材、横材、连接螺 栓、联板组成。不同的角钢塔其结构难以找到共同的特征来适用机器人的运动规划,创新难 度极大。而一部分铁塔上,特别是高呼高的铁塔上装设有防坠轨道,此类型的铁塔可为机器 人设计研究提供了另一种选择攀爬方式,可有效提高机器人的效率。
技术实现要素:
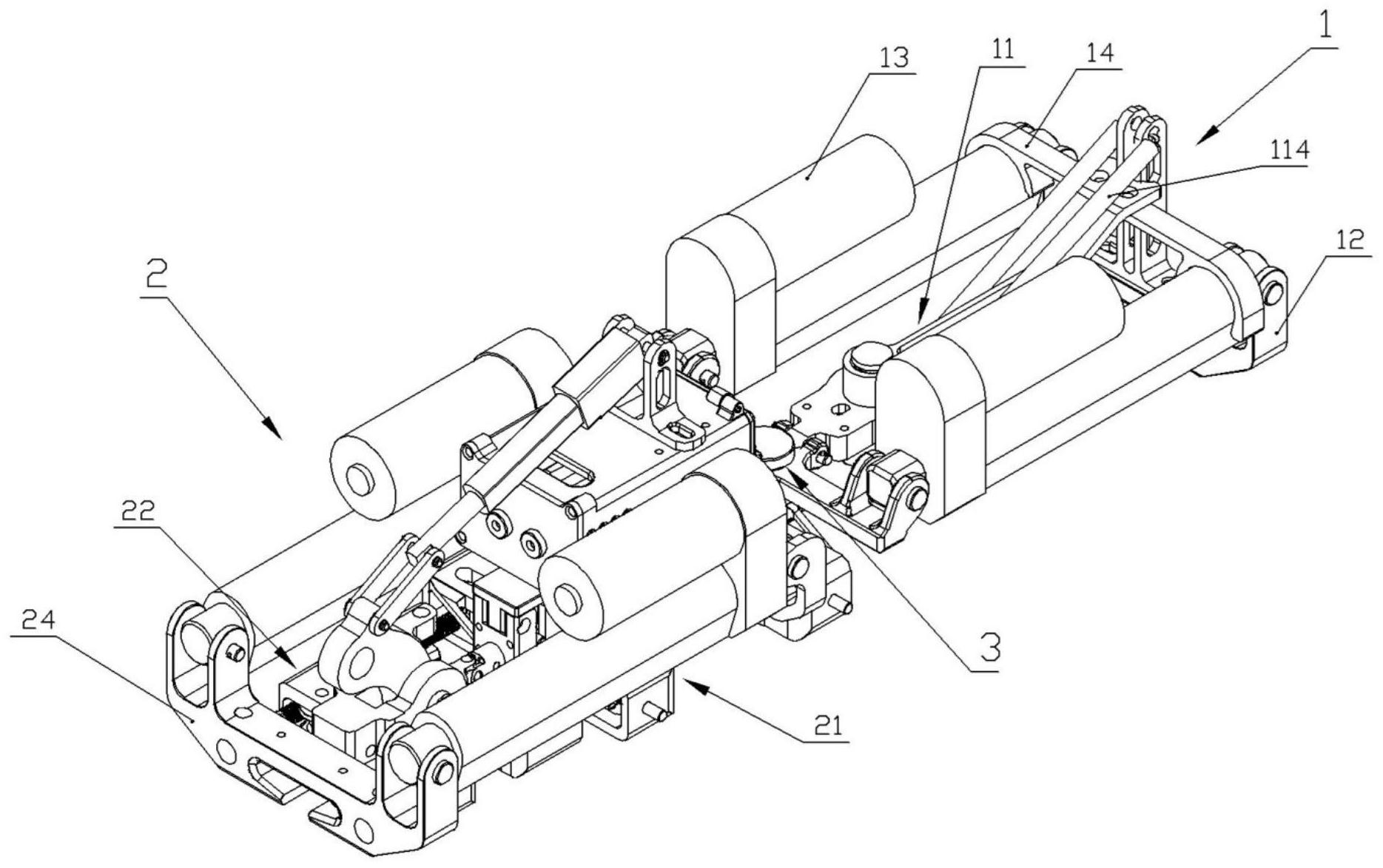
本发明的目的在于针对现有技术的不足之处,提供一种能够将作业人员运送至塔 上的输电线路沿防坠轨道爬塔机器人及方法。 本发明提供的这种输电线路沿防坠轨道爬塔机器人,它包括上提装置、下推装置 和铰接机构;上提装置包括浮动架、伸缩缸和上提桁架,上提桁架卡合于防坠轨道上、顶部 与伸缩缸铰接,伸缩缸的另一端与浮动架相连,浮动架与铰接机构铰接;下推装置包括滑动 座、伸缩缸和下推桁架,滑动座和下推桁架均卡于防坠轨道上能够沿轨长方向滑动,伸缩缸 的一端与下推桁架的顶部铰接、另一端与滑动座相连,滑动座与铰接机构相连。 所述浮动架包括拉簧扣、摆动架和浮动臂;拉簧扣包括底板和立臂,拉簧扣以其底 板连接于所述上提桁架上;摆动架包括横杆,横杆中部设有轴孔和铰接座,横杆两端设有关 于轴孔对称布置的耳座,摆动架通过轴孔与铰接机构装配;浮动臂内设阶梯套,阶梯套内设 电磁铁用作刹车扣,浮动臂的一端铰接于铰接座内、另一端与拉簧扣接触止退,浮动臂与拉 簧扣之间设有拉簧。 所述上提桁架为U型架,包括端板和侧板,端板下设匹配于所述防坠轨道的底槽, 侧板顶部设有安装口,安装口内设连接轴。 所述伸缩缸包括缸体和活塞杆,缸体外设中耳板;伸缩缸成对布置、分设于所述浮 动臂两侧、缸体铰接于耳座内、活塞杆连接于上提桁架安装口内;两伸缩缸之间设有稳定 4 CN 111591933 A 说 明 书 2/5 页 扣。 所述稳定扣为门型扣,其顶板中部设有连接孔,两侧板下设匹配于所述伸缩缸的 卡槽;稳定扣两端分别与伸缩缸卡接、中部通过连接孔与所述浮动臂装配。 所述滑动座包括支撑座和防坠座;支撑座包括主座、压轨轮和卡轨轮,主座包括匹 配于所述防坠轨道的滑槽,压轨轮连接于主座上,卡轨轮成对布置、分设于主座两侧;防坠 座包括座主体、防坠棘轮和导向轮,座主体包括匹配于所述防坠轨道的滑槽,防坠棘轮一端 通过伸缩缸与主座相连、另一端铰接于座主体上能够绕铰接轴转动与轨道抱死,导向轮分 设于座主体两侧;支撑座和防坠座通过十字型联轴器相连。 所述主座呈工字型,包括上翼缘、下翼缘和连接两翼缘的一对腹板;两腹板之间为 所述滑槽;上翼缘一端设有安装座、另一端设有压轨轮座,上翼缘与下翼缘设有长圆孔用以 安装卡轨轮座,主座通过安装座与所述铰接机构装配,压轨轮座为中空的矩形座,其两对侧 壁上均设有开口槽,压轨轮通过轮轴安装于同对开口槽内高度可调,卡轨轮座包括C型座、 螺栓、螺母和弹簧,卡轨轮装配于卡轨轮座内、轮轴伸至长圆孔内,螺栓的一端与C型座固接 另一端穿过腹板通过螺母锁紧,弹簧套于螺栓外、位于C型座与腹板之间,转动螺母即可调 节卡轨轮相对位置。 所述下推桁架为U型架,包括端板和侧板,端板下设匹配于所述防坠轨道的底槽, 侧板顶部设有安装口,安装口内设连接轴以与所述伸缩缸相连,伸缩缸的另一端连接于安 装座内,下推桁架的下部与所述主座之间设有弹簧。 所述铰接机构包括底座、转轴和轴盖,底座包括定位套,转轴套于定位套上通过轴 盖锁紧,铰接机构的一端通过底座与所述下推装置相连,上提装置铰接于转轴外。 本发明还提供了一种输电线路沿防坠轨道爬塔方法,本方法运用上述的机器人为 工具进行,包括如下步骤: 1)作业人员到达现场,检查防坠轨道安装状况,确定是否满足机器人作业; 2)将一对上述机器人安装在防坠轨道上,并对机器人进行调试、确认; 3)将作业人员的后背保护绳和升降绳分别固定在两个机器人上; 4)机器人爬行到指定位置并锁定; 5)分别对机器人进行冲击试验,合格后,将升降机、载人仓安装在升降绳上; 6)将载人吊仓的轨道轮安装在防坠轨道上,启动升降机,使载人吊仓受力; 7)作业人员将防坠保险绳系好并冲击合格后,进入载人吊仓; 8)启动升降机进行爬塔作业; 9)作业任务完成后,最后一个下塔人员,将机器人刹车复位并下塔; 10)操作机器人使之与防坠轨道解除锁定; 11)作业人员通过升降绳与防坠绳将机器人拉至地面。 本发明在投入使用后通过机器人将作业人员运输至塔上,爬塔时,机器人安装于 防坠轨道上,使作业人员在爬塔过程中无需耗费大量的体力和时间,降低劳动强度,提高作 业效率;另一方面通过上提装置和下推装置协同作业将即可完成沿防坠轨道的攀爬,由于 上提装置与下推装置通过铰接机构铰接,使两者能够相对摆动从而能够攀爬具有一定弯曲 度的防坠轨道,并通过上提装置中的浮动架使机器人能够完成俯仰从而能够攀爬具有一定 俯仰角度的防坠轨道,提高适应性。又能为登塔人员全程提供后备保护,起到防止高空坠落 5 CN 111591933 A 说 明 书 3/5 页 的作用。 附图说明 图1为本发明一个优选实施例中机器人的立体示意图。 图2为本优选实施例中上提装置的立体放大示意图。(伸缩缸和拉簧未画出) 图3为图2的横剖示意图。 图4为本优选实施例中下推装置的立体放大示意图。 图5为图4的横剖示意图。 图6为本优选实施例中主座的立体放大示意图。 图7为本优选实施例中座主体的立体放大示意图。 图8为本优选实施例中铰接机构的爆炸放大示意图。 图9为下推桁架作用下推爬塔时的运动状态示意图。 图10为上提桁架作用上提爬塔时的运动状态示意图。 图11为本优选实施爬塔过程示意图。 图示序号: 1—上提装置, 11—浮动架、111—摆动架、112—浮动臂、113—拉簧扣、114—拉簧, 12—上提桁架、121—短板、122—侧板, 13—伸缩缸,14—稳定扣; 2—下推装置, 21—支撑座、211—主座、212—压轨轮、213—卡轨轮、214—安装座、215—压轨轮 座、216—卡轨轮座、217—面滑轮, 22—防坠座、221—座主体、222—防坠棘轮、223—导向轮、224—加压气缸, 23—十字型联轴器,24—下推桁架; 3—铰接机构, 31—底座、311—定位槽、312—定位套、313—卡凸, 32—转轴,33—轴盖; 4—电磁铁;5—防坠轨道; a—横杆,b—轴孔,c—铰接座,d—耳座,e—阶梯套,f—耳板,g—底板,h—立臂, i—上翼缘,j—下翼缘,k—腹板。











