
技术摘要:
本发明属于目标跟踪技术领域,具体涉及一种基于YOLOv3和核相关滤波改进的目标跟踪算法,包括步骤一:通过加权整合目标运动信息和表观信息,以及采用K邻域搜索,对YOLOv3网络模型进行改进,再使用迁移学习的训练方法训练改进后的目标检测模型;步骤二:对核相关滤波进行 全部
背景技术:
目标检测跟踪是近年来计算机视觉领域中备受关注的前沿方向,它从包含运动目 标的图像序列中检测、识别并跟踪目标,并对其行为进行理解和描述。 随着现代信息处理技术的发展,目标检测跟踪在智能视频监控、机器人视觉导航 及医学诊断等领域具有重要意义,具有广泛的应用前景和潜在的经济价值已成为一项极为 重要和基本的技术。然而,由于景物的多样性和复杂性,在具体工程应用中对多目标和弱小 目标进行检测跟踪的问题仍没有有效解决。 近几年来,基于深度学习的目标检测方法得到了很大的突破,其主要的方法可以 分为两类。一类是基于区域推荐的目标检测方法,该方法的处理过程一般为首先使用区域 推荐产生候选目标,随后使用卷积神经网络进行处理;具有代表性的方法有RCNN、 FastRCNN、FasterRCNN、MaskRCNN等。该方法的精度较高,但是不能满足实时应用的需求。另 一类是基于回归方法的目标检测算法,该方法的处理思想为将检测问题作为回归问题处 理,直接预测目标位置与类别;具有代表性的算法有YOLO、SSD、YOLOv2、YOLOv3等,该类方法 的速度快,但是相对而言精度偏低。 有鉴于此,本发明人提出了一种基于YOLOv3和核相关滤波改进的目标跟踪算法, 以解决针对运动中的多目标和弱小目标不易进行检测跟踪的问题。
技术实现要素:
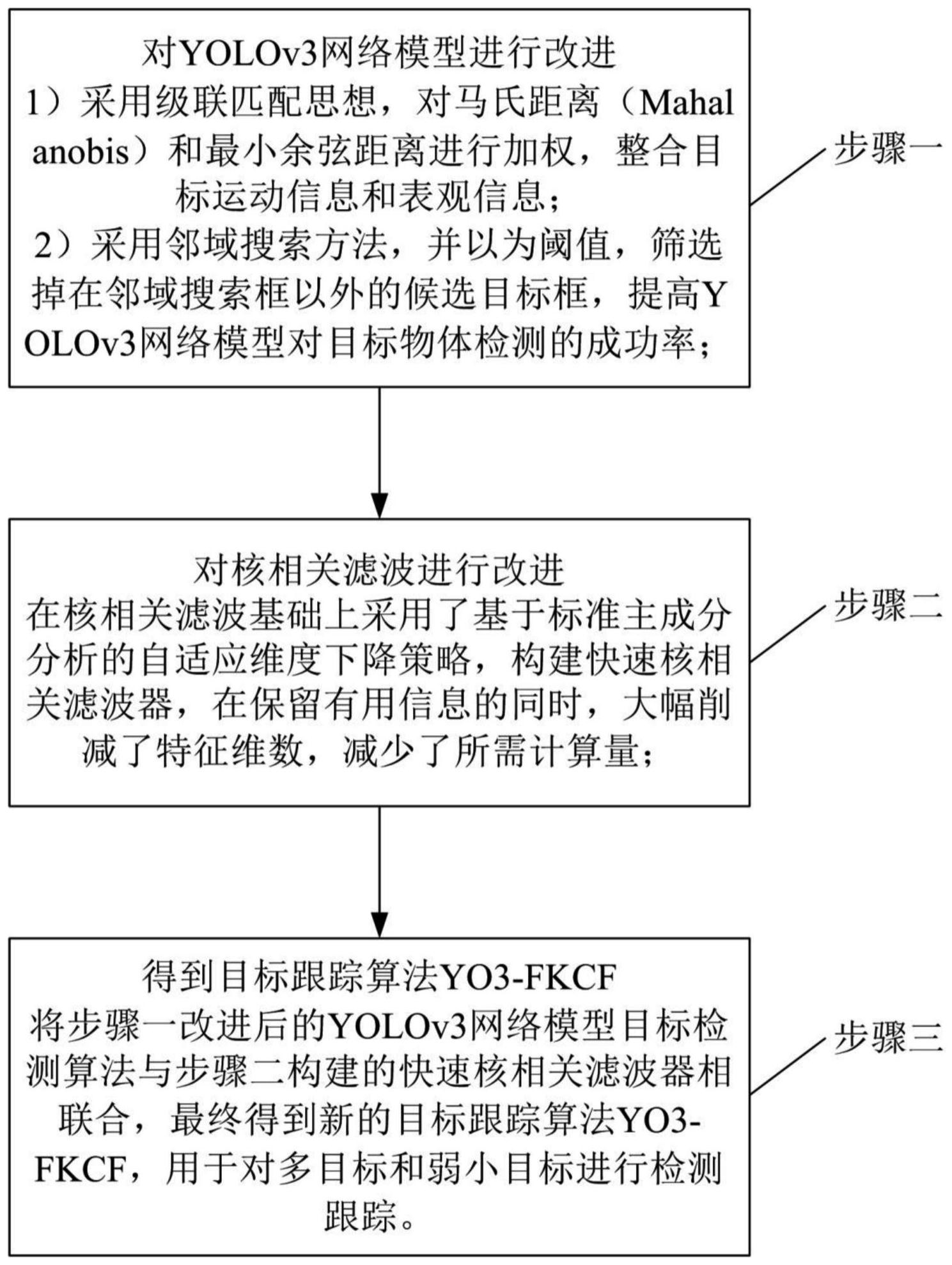
为了解决现有技术中存在的上述问题,一种基于YOLOv3和核相关滤波改进的目标 跟踪算法,本发明通过对YOLOv3网络模型进行和核相关滤波进行改进,最后将两者联合,以 实现对运动中的多目标和弱小目标进行检测跟踪的目的。 本发明要解决的技术问题通过以下技术方案实现:本发明提供一种基于YOLOv3和 核相关滤波改进的目标跟踪算法,包括以下步骤: 步骤一:对YOLOv3网络模型进行改进 1)采用级联匹配思想,对马氏距离(Mahalanobis)和最小余弦距离进行加权,整合 目标运动信息和表观信息; 2)采用K邻域搜索方法,并以K为阈值,筛选掉在K邻域搜索框以外的候选目标框, 提高YOLOv3网络模型对目标物体检测的成功率; 步骤二:对核相关滤波进行改进 在核相关滤波基础上采用了基于标准主成分分析的自适应维度下降策略,构建快 速核相关滤波器,在保留有用信息的同时,大幅削减了特征维数,减少了所需计算量; 步骤三:得到YO3-FKCF目标跟踪算法 5 CN 111582349 A 说 明 书 2/9 页 将步骤一改进后的YOLOv3网络模型目标检测算法与步骤二构建的快速核相关滤 波器相联合,最终得到新的目标跟踪算法YO3-FKCF,用于对多目标和弱小目标进行检测跟 踪。 进一步地,所述步骤一中1)具体过程为: 首先,采用马氏距离法,通过测量远离平均轨迹位置的标准偏差来考虑目标状态 估计的不确定性,使用如公式(1)计算预测状态和新到达测量值之间的马氏距离: 其中,(yj,Si)表示第i条轨迹分布到测量空间的投影,λ表示第j条边界框的检测; 然后,考虑到目标在图像空间中的问题,采用更具说服性的余弦距离,对于每个边 界框检测dj,使用||rj||=1计算出外观描述符,与此同时,维护每个轨迹的最后Lk=100个 相关外观描述符 在测量外观空间中,第i个轨迹和第k个检测之间的最小余弦距离 公式(2)为: 最后,上述两个指标分别提供了指派问题的不同方面,一方面,利用马氏距离预测 运动后目标可能的位置信息;另一方面,利用最小余弦距离来估计目标表观信息,弥补了遮 挡情况下运动信息的不足,二者相辅相成,加权整合表示如公式(3)所示: θ(i,j)=λd马氏(i,j) (1-λ)d余弦(i,j) (3)。 进一步地,所述步骤一中2)具体过程为:在目标跟踪领域,通常认为目标在相邻两 帧序列图上的相对位移不是很大,在此基础之上,采用了一种K邻域搜索方法,以提高 YOLOv3网络模型检测算法在选定区域的物体检测成功率; K邻域搜索是把上一帧中检测到的目标矩形区域作为基础矩阵,将下一帧的搜索 矩阵区域设置到该基础矩形周围,同时要求这两个矩阵区域的中心点坐标位置重合,并且 满足相应的比例,如公式(4)所示: 其中,W搜索、W基础分别表示矩形搜索区域和前一帧目标矩形区域的宽度,H搜索、H基础分 别表示这两者的高度。 4.根据权利要求3所述的一种基于YOLOv3和核相关滤波改进的目标跟踪算法,其 特征在于:所述步骤二具体过程为:假设训练样本为xt,在它的每个像素n处都包含一个d维 的特征向量xt(n)∈Rd,维度下降技术的核心是构建一个大小为 的投影矩阵Mt,其中 表示压缩后的特征维数,η为学习率,位移模板更新如公式(5)所示: ut=(1-η)ut-1 ηxt (5) 通过最小化位移模板ut的重建误差来获取投影矩阵Mt如公式(6)所示: 其中,n涵盖了模板ut的所有元素,当 和Mt满足正交约束时ut重建误差最小,此 时,Mt利用公式(7)作矩阵的特征值分解: 6 CN 111582349 A 说 明 书 3/9 页 投影矩阵Mt由对应于Ct的 个最大特征值的特征向量组成; 通过使用压缩的样本 和压缩的位移模板 来获取测试样本zt 的响应图,如公式(8)所示: 其中,F-1是离散傅里叶逆变换, 表示元素乘积, 是核函数k的输 出, 是上一帧中的更新的系数; 最后,通过压缩的训练样本 来更新系数 如公式(9)所示: 其中, 是控制过拟合的正则化参数。 进一步地,将所述步骤一改进后的YOLOv3网络模型目标检测算法与步骤二构建的 快速核相关滤波器相联合,得到目标跟踪算法YO3-FKCF,YO3-FKCF目标跟踪算法具体步骤 如下: 步骤1:在待跟踪序列中,取其第一帧图像,手动获取待跟踪目标并将其设置为目 标模板; 步骤2:根据前一帧中的跟踪目标坐标位置,生成邻域搜索图,然后再把搜索图中 目标运动信息和表观信息进行加权整合,从而得到对应检测结果; 步骤3:根据类别标签过滤当前检测结果,得到同一类别的目标候选框,如果没有 同类的候选目标,则把上一帧的跟踪目标坐标作为当前帧的跟踪结果; 步骤4:利用公式(9)计算最终响应图,选择最大值得到当前目标位置并确定目标; 步骤:5:将加权整合得到的公式(3)的结果与τ值(τ值设定为0.67进行比较,为避 免模板更新过于迅速,设定5作为帧差条件,将当前匹配目标所在帧数和上一目标模板所在 帧数的差值与设定帧差5进行比较,当同时满足大于以上两个条件时,则更新模板,同时跳 至步骤2;如果不满足,则不更新模板。 进一步地,所述阈值K取值为3。 进一步地,对所述步骤一改进后的YOLOv3网络模型,使用迁移学习的训练方法训 练,得到实用模型,用于提高复杂场景中对多目标和弱小目标检测的准确率。 与现有技术相比,本发明具有如下有益效果: 本发明通过加权整合目标运动信息和表观信息,再加上采用K邻域搜索,改进了 YOLOv3网络模型目标检测算法,再使用迁移学习的训练方法训练改进后的目标检测模型, 得到实用模型,提高了复杂场景中对多目标和弱小目标检测的准确率;在核相关滤波基础 上采用了基于标准主成分分析的自适应维度下降策略,构建快速核相关滤波器,在保留有 用信息的同时大大降低时间复杂度,保证跟踪过程中实时性;最后,将改进后的YOLOv3网络 模型与构建的快速核相关滤波器相联合,得到新的YO3-FKCF目标跟踪算法,实验结果表明, 改进后的目标检测算法既保证了实时性,又在对多目标和弱小目标的检测精度上提高了 7 CN 111582349 A 说 明 书 4/9 页 5.71%,并且最终得到的目标跟踪算法在对多目标和弱小目标的跟踪过程中也有较高的精 度、鲁棒性及实时性。 附图说明 图1为本发明目标跟踪算法的步骤图; 图2为本发明K邻域搜索方法示意图; 图3本发明实验同一图片不同K值的筛选结果图; 图4本发明实验实际场景下采集的部分图; 图5本发明实验扩增图; 图6本发明实用模型训练过程示意图; 图7本发明实验改进前后YOLOv3算法效果对比图; 图8是本发明实验11种目标跟踪算法效果对比图。











