
技术摘要:
本公开的实施例提供了一种抛投机器人开锁控制方法、系统、装置及存储介质。该方法包括步骤:实时获取机器人的加速度值;根据加速度值判断机器人依次经过失重状态、冲击状态和着陆静止状态;发出解锁指令对抛投机器人解锁。本公开的实施例通过依次经历的失重、冲击和着 全部
背景技术:
随着社会经济的迅猛发展,消防安全越来越受到重视,消防人员在不了解灾害情 况时,可先将用于消防的机器人抛投到易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场,通 过机器人来进行数据的采集、处理和反馈。这不仅可以大大降低消防人员的伤亡,而且还可 以根据其探测数据及时作出应对措施,减少国家财产损失。 用于消防的机器人往往需要安装摄像头、录音设备以及天线等组件来进行数据的 采集和反馈,且为了能更好的进行现场数据采集,摄像头、录音设备以及天线等组件需要设 置在机器人上部且具有一定的高度,但是这样的设置不利于机器人的抛投动作,极易造成 机器人外部的组件被碰撞而产生故障。因此,通过将摄像头、录音设备以及天线等组件可伸 缩或转动地设置在机器人上来解决上述问题,当将机器人抛投进入事故现场时,其处于被 锁定状态,此时多个组件被锁定在机器人的中心或内部等不易被碰撞的位置,而当机器人 进入事故现场成功落地后,其处于解锁状态,此时多个组件展开到设定的位置来进行数据 采集。 现有技术中的机器人往往通过传感器瞬时值来判断被抛投的机器人是否落地,但 由于建筑结构多种多样,机器人被抛投过程中可能受到多次碰撞,容易导致其落地识别错 误,存在没有落地即被解锁的现象,从而造成机器人故障。
技术实现要素:
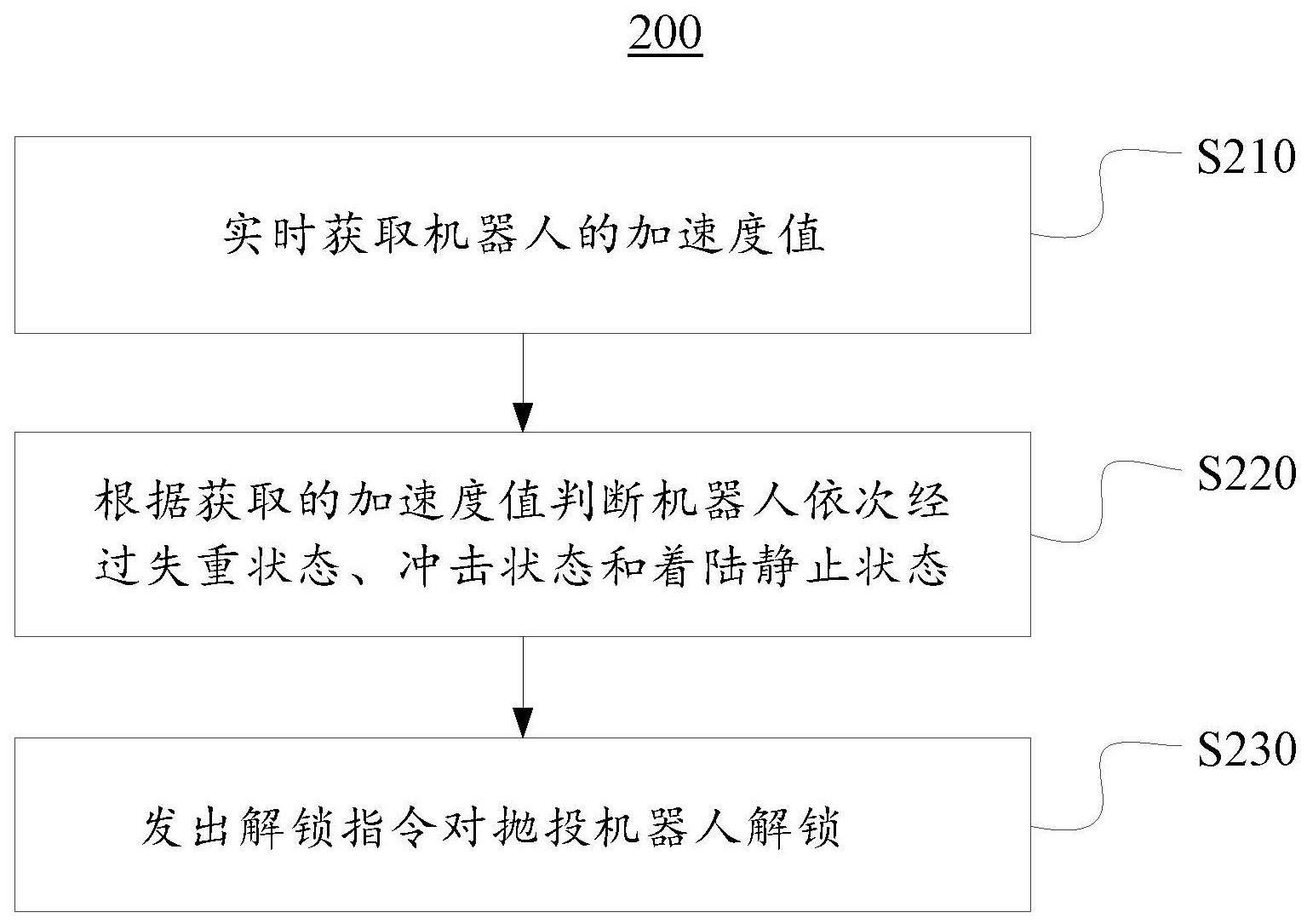
本公开旨在至少解决现有技术或相关技术中存在的技术问题之一。 为此,在本公开的第一方面,提供了一种抛投机器人的开锁控制方法,包括步骤: 实时获取抛投机器人的加速度值;根据所述加速度值判断所述机器人依次经过失重状态、 冲击状态和着陆静止状态;发出解锁指令对所述机器人解锁;其中,当所述加速度绝对值位 于第一数值范围内时,确定所述机器人处于失重状态;当所述加速度绝对值大于第一阈值 时,确定所述机器人处于冲击状态;当所述加速度绝对值位于第二数值范围内且持续时间 大于或等于第二阈值时,确定所述机器人处于着陆静止状态。 进一步地,所述第一数值范围为0~0.1g。 进一步地,所述第二数值范围为0.8~1.0g。 进一步地,所述第一阈值为2.0g。 进一步地,所述第二阈值为1s。 进一步地,所述根据所述加速度值判断所述机器人依次经过失重状态、冲击状态 和着陆静止状态包括:在着陆静止状态之前,多次经过所述失重状态和冲击状态。 在本公开的第二方面,提供了一种抛投机器人的开锁控制系统,包括:加速度传感 3 CN 111589025 A 说 明 书 2/8 页 器,测量机器人的加速度值;开锁控制模块,实时获取所述加速度传感器的测量值,根据所 述加速度值判断所述机器人依次经过失重状态、冲击状态和着陆静止状态时,发出解锁指 令对抛投机器人解锁;其中,当所述加速度值位于第一数值范围内时,开锁控制模块确定所 述机器人处于失重状态;当所述加速度值大于第一阈值时,开锁控制模块确定所述机器人 处于冲击状态;当所述加速度值位于第二数值范围内且持续时间大于或等于第二阈值时, 开锁控制模块确定机器人处于着陆静止状态。 在本公开的第三方面,提供了一种抛投机器人的开锁控制装置,包括存储器和处 理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如上所述的方法。 在本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序, 所述程序被处理器执行时实现根据本公开的第一方面的方法。 本发明的有益效果:本发明中根据获取的加速度值,判断机器人是处于失重状态、 冲击状态或着陆静止状态,机器人被抛投进入事故现场时,当其受到碰撞或落向地面的瞬 间,其加速度值会变大,此时根据设定的第一阈值判断出机器人处于冲击状态;当机器人落 向地面上且不再弹起时,其加速度值持续稳定,范围约为重力加速度值,此时根据设定的第 二数值范围和第二阈值判断出机器人处于着陆静止状态。然而由于建筑建构的复杂,其由 空中落向地面之前,可能经历多次碰撞,其落向地面时,也可能经历多次的弹起和落下过程 才会达到最后的着陆静止状态,也即本发明中判断出机器人可能重复经历多次的失重状态 到冲击状态,才能达到最后的着陆静止状态。而无论经历多少次碰撞和多少次的弹起和落 下过程,当机器人依次经历失重状态、冲击状态和着陆静止状态时,便可以确定机器人是经 历了下落到地面后达到着陆静止的过程,而只有被抛出去后,机器人才能经历该过程,因 此,通过判断依次经历失重状态、冲击状态和着陆静止状态,可以确定机器人是被抛投出去 后达到最后的着陆静止状态,然后再发出解锁指令对机器人解锁,保证机器人被抛投出去 并成功着陆静止后再解锁。避免发生机器人被抛投之前或被抛投出去还没落地静止就解锁 从而使机器人上打开的组件受到碰撞而造成损坏的情况。另外,本发明是对抛投过程进行 判断,并且是将抛投过程中落向地面后着陆静止过程中必然经历的失重、冲击和着陆静止 状态结合在一起,能够准确的判断出被抛投的机器人是否成功着陆,排除了抛投过程中存 在的诸多不确定发生的多次碰撞和/或多次弹起和落下过程对着陆静止状态的判断造成干 扰,保证了机器人解锁的准确性。 应当理解,公开内容部分中所描述的内容并非旨在限定本公开的实施例的关键或 重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理 解。 附图说明 结合附图并参考以下详细说明,本公开各实施例的上述和其他特征、优点及方面 将变得更加明显。在附图中,相同或相似的附图标记表示相同或相似的元素,其中: 图1为本公开的实施例的示例性抛投机器人的结构示意图; 图2为本公开的第一实施例的抛投机器人的开锁控制方法的流程图; 图3为本公开的第二实施例的抛投机器人的开锁控制方法的状态转换图; 图4为本公开的第三实施例的抛投机器人的开锁控制系统的方框图; 4 CN 111589025 A 说 明 书 3/8 页 图5为本公开的实施例的示例性电子设备的方框图。











