
技术摘要:
本发明涉及一种满足高精度导航敏感器测试和停放要求的一体化工装,包括底座、气浮隔振平台、机械臂、头部限位装置、尾部限位装置;气浮隔振平台位于工装底座之上,二者通过机械臂连接,通过控制机械臂使气浮隔振平台具备俯仰、偏航两自由度转动;高精度导航敏感器安装 全部
背景技术:
撞击探测需要撞击器以高速侵入天体选定区域,对天体内部结构成分等性质进行 反演,因此在撞击器飞行过程中,导航敏感器的高精度实时导航对撞击器能撞击目标天体 指定区域至关重要。 在地面试验时,由于地面设备平台等受外界因素干扰,引入噪音信号使导航敏感 器精度达不到使用精度,
技术实现要素:
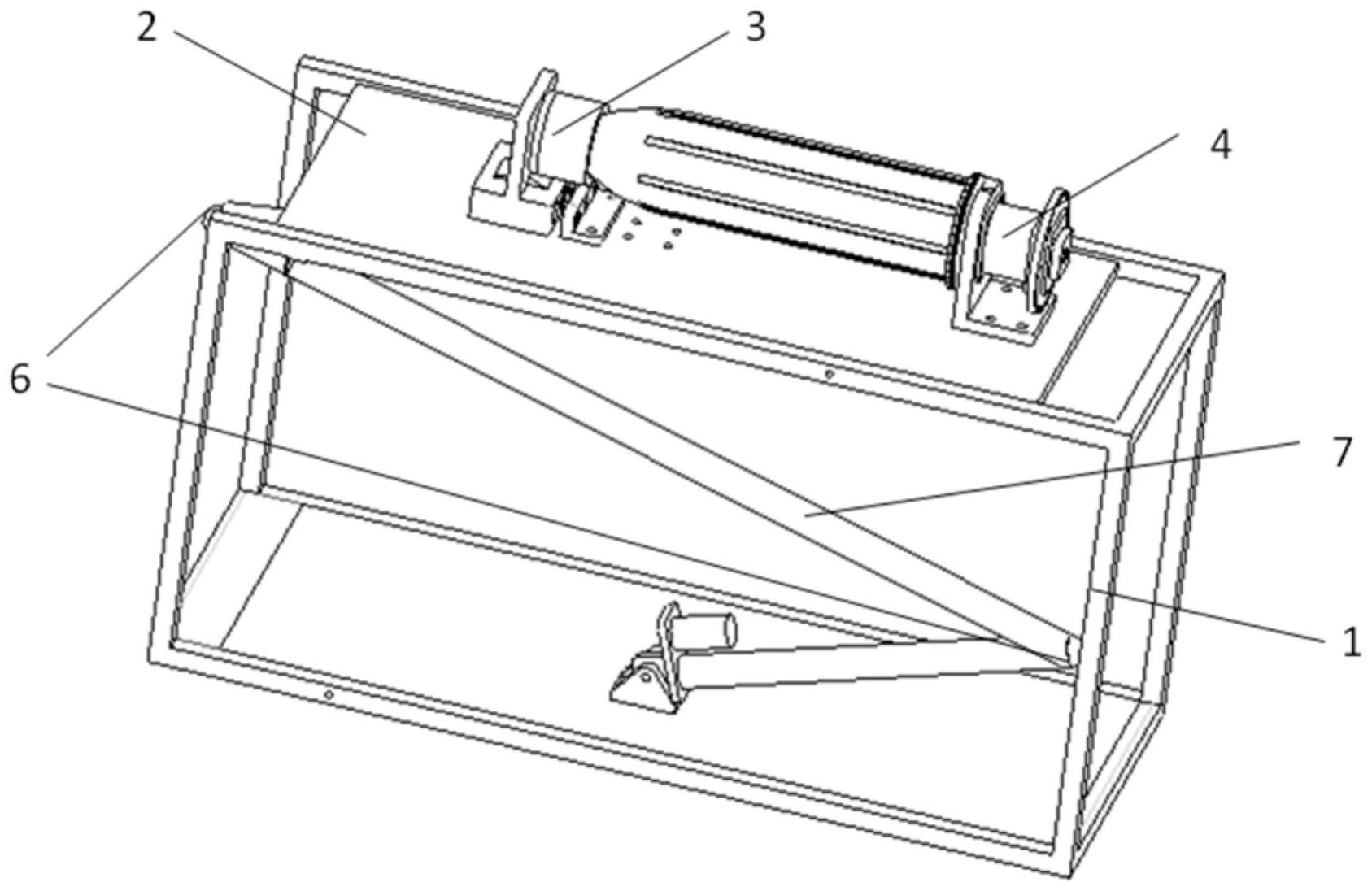
本发明解决的技术问题是:针对深空高速撞击探测任务中导航敏感器测量精度高 的特点,基于气浮隔振光学平台的思想,提供了一种满足高精度导航敏感器测试和停放要 求的一体化工装装置。 本发明解决技术的方案是:一种满足高精度导航敏感器测试和停放要求的一体化 工装,包括底座、气浮隔振平台、机械臂、头部限位装置、尾部限位装置;气浮隔振平台位于 工装底座之上,二者通过机械臂连接,通过控制机械臂使气浮隔振平台具备俯仰、偏航两自 由度转动;高精度导航敏感器通过头部限位装置和尾部限位装置安装于气浮隔振平台上, 由头部限位装置和尾部限位装置对高精度导航敏感器的转动和转向进行锁定。 优选的,还包括控制系统,通过控制系统发送指令控制步进电机,由步进电机驱动 机械臂带动气浮隔振平台运动,进而调节导航敏感器的姿态变化。 优选的,还包括角度传感器,角度传感器用于监测气浮隔振平台的角度,该角度发 送至控制系统,由控制系统根据角度进行判断,防止机械臂发生变动导致气浮隔振平台的 角度发生变化,保持气浮隔振平台角度的准确性。 优选的,所述的控制系统将高精度导航敏感器位置测量信息与外部设备共享。 优选的,所述头部限位装置和尾部限位装置分别放置于气浮隔振平台之上,置于 导航敏感器中轴线处。 优选的,所述的头部限位装置采用涡杆传动,内部增加橡胶圈,可实现自由转向和 锁定功能。 优选的,所述的尾部限位装置即为导航敏感器底螺,能够实现自由转动,直接与导 航敏感器尾部通过螺纹连接。 本发明与现有技术相比的有益效果是: 本发明提供了一种满足高精度导航敏感器测试和停放要求的一体化工装装置,可 满足停放承载力大于30kg,气浮隔振平台可消除外部干扰,具备俯仰、偏航和滚转三自由度 转动调节,小范围三轴平动,水平校准功能和转向锁定功能。 3 CN 111546303 A 说 明 书 2/3 页 本发明气浮隔振平台位于工装底座之上,可以消除地面设备外部干扰噪声对导航 敏感器的影响。 本发明头部限位装置采用涡杆传动,可调节与高精度导航敏感器距离,实现锁定 功能,限位装置内部增加橡胶圈,采用非固定接触,可实现自由转向。 附图说明 图1为本发明整体结构图; 图2为本发明三视图; 1—底座、2—气浮隔振平台、3—头部限位装置、4—尾部限位装置、5—角度传感 器、6—步进电机、7—机械臂











