
技术摘要:
本发明提供了一种用于机器人控制的意识跟踪识别算法,控制机构启动,并通过图像采集机构对机器人目标进行持续跟踪并采集图像;将采集到的图像通过图像预处理机构进行图像预处理;将预处理后的目标图像通过图像分割机构进行分割;将分割后的图像通过图像特征提取机构获 全部
背景技术:
机器人指能自动运行任务的人造机器设备,包括一切模拟人类行为或思想与模拟 其他生物的机械,用以取代或协助人类工作,目标的识别和定位是机器人的首要任务和设 计难点,识别和定位的准确性关系到机器人的工作效率。传统的跟踪识别系统是先跟踪后 识别,而且跟踪和识别被看作两个完全独立的模块,它们分别采用不同的模型,系统只是只 完成简单意义上的跟踪和识别,跟踪的结果就直接影响识别的精度,但识别却不能反过来 影响跟踪结果,另外,国内外学者提出了一种基于边缘曲率的方法识别重叠目标,对于轻微 遮挡的重叠目标的识别正确率为90.9%。然而,这些研究都是针对静态条件下的,静态识别 的方法并不能完全适用于机器人目标在运动过程的动态控制。后经实验证明利用前后图像 的相关性能够有效减少图像处理的时间。
技术实现要素:
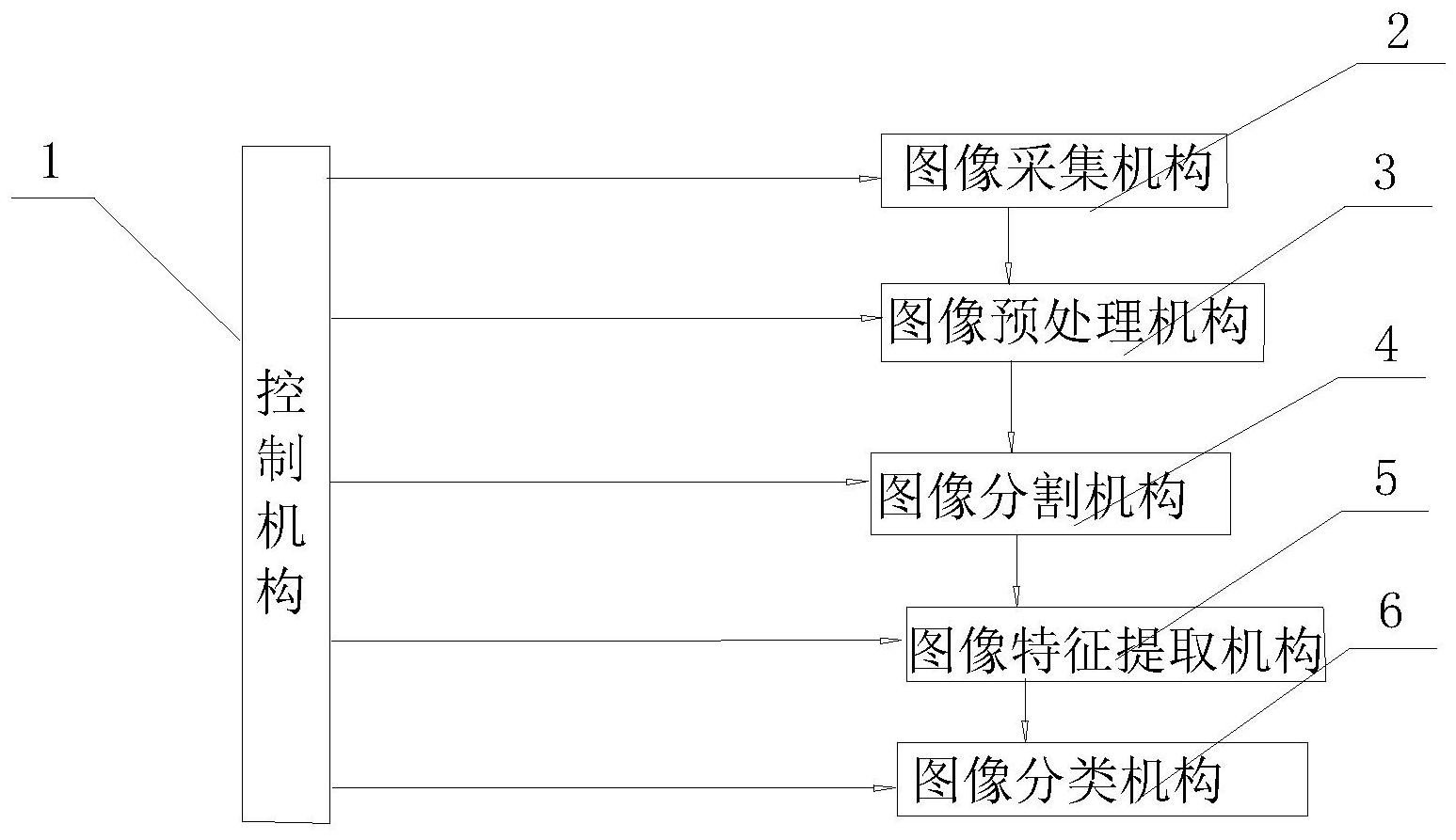
有鉴于此,本发明旨在提出一种用于机器人控制的意识跟踪识别算法,以便于机 器人控制目标时,不可避免的遇到控制目标重叠、图像处理的时间长的问题时,所需要的一 种可以准确识别目标、提高跟踪识别效率的机器人控制的意识跟踪识别算法。 为达到上述目的,本发明的技术方案是这样实现的: 一种用于机器人控制的意识跟踪识别算法包括如下步骤: 步骤一:将控制机构启动,并通过图像采集机构对机器人目标进行持续跟踪并采 集图像; 步骤二:将采集到的图像输入到图像预处理机构,所述图像预处理机构采用中值 滤波算法对机器人的目标图像进行图像预处理; 步骤三:将预处理后的目标图像通过图像分割机构进行分割; 步骤四:将分割后的图像通过图像特征提取机构获得预处理图像; 步骤五:将预处理后的图像输入到图像分类机构,所述图像分类机构采用KNN算法 对机器人的目标图像进行图像分类并识别出目标物。 进一步的,所述控制机构为PLC。 进一步的,所述图像采集机构设有跟踪器,所述跟踪器前端设有彩色CCD摄像机。 进一步的,所述图像分割机构采用基于区域的分割方法对机器人的目标图像进行 图像分割。 进一步的,所述图像特征提取机构采用LBP特征提取算法对机器人的目标图像进 行特征提取。 进一步的,所述控制机构外部信号连接至伺服电机。 3 CN 111612824 A 说 明 书 2/3 页 进一步的,所述控制机构的型号为S7-200CN,所述跟踪器的型号为gps-k16-b,所 述CCD摄像机的型号为SangNondSN-0745,所述伺服电机的型号为SGMMS-04ADC6S。 相对于现有技术,本发明所述的一种用于机器人控制的意识跟踪识别算法具有以 下优势: (1)本发明所述的一种用于机器人控制的意识跟踪识别算法,其算法识别效果好, 运行时间短,通过跟踪识别算法对机器人控制目标能有效提高控制效果,从而提高机器人 的工作效率。 (2)本发明所述的一种用于机器人控制的意识跟踪识别算法,其算法通过对机器 人控制目标持续跟踪拍摄,可避免目标因被遮挡或被光线流场干扰导致出现未能检测识别 的情况,识别效果更好,减少后续图像处理的工作量。 附图说明 构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实 施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1为本发明实施例所述的一种用于机器人控制的意识跟踪识别算法整体结构的 流程图。 附图标记说明: 1-控制机构;2-图像采集机构;3-图像预处理机构;4-图像分割机构;5-图像特征 提取机构;6-图像分类机构。











