
技术摘要:
本发明提供的一种无人机的航空施药航线生成方法及系统,包括:采集待施药区域的现场害虫监测及气象数据,遥感采集待施药区域的地面点云和高光谱数据;基于支持向量机融合作物数据、现场害虫监测数据、气象数据、地面点云以及高光谱数据,计算待施药区域中的各子区域内 全部
背景技术:
近年来,随着机械化程度及配套种植技术的逐步提高,农业机械的发展为农业现 代化提供了极大的便利。其中,基于无人机的作业工具为农业现代化提供了高效、便捷的作 业方法。 一方面,现有技术中利用无人机针对大面积作物的病虫害进行施药防治,通常是 操控者主观上根据受灾情况,进行防治方案、施药处方、作业航行线路的设计。在整个施药 过程中,需要多方面人员的参与,例如:需要先关专业人员对实际的受灾区域进行考察,以 确定出病虫害类型以及病虫害危害等级;需要农业专家根据病虫害类型等信息主观的制定 出防治方案以及施药处方图等。 另一方面,现有技术中利用无人机针对大面积作物的病虫害进行施药防治,一般 是根据人工采样获取到的待施药区域内的病虫害特征,统一进行防治,无法针对待施药区 域内的各个子区域进行区别化防治。 由于在现有技术中对于防治方案以及施药处方图的确定具有主观性和统一性,往 往造成病虫害的防治工作不能做到对症下药,或者在药量的使用上存在较大的偏差,从而 错过了病虫害防治的关键窗口期或造成农药的浪费。同时,现有的利用无人机进行施药需 要多方面人员的参与,大大的降低了农业自动化的程度,造成了人力、物力的浪费。
技术实现要素:
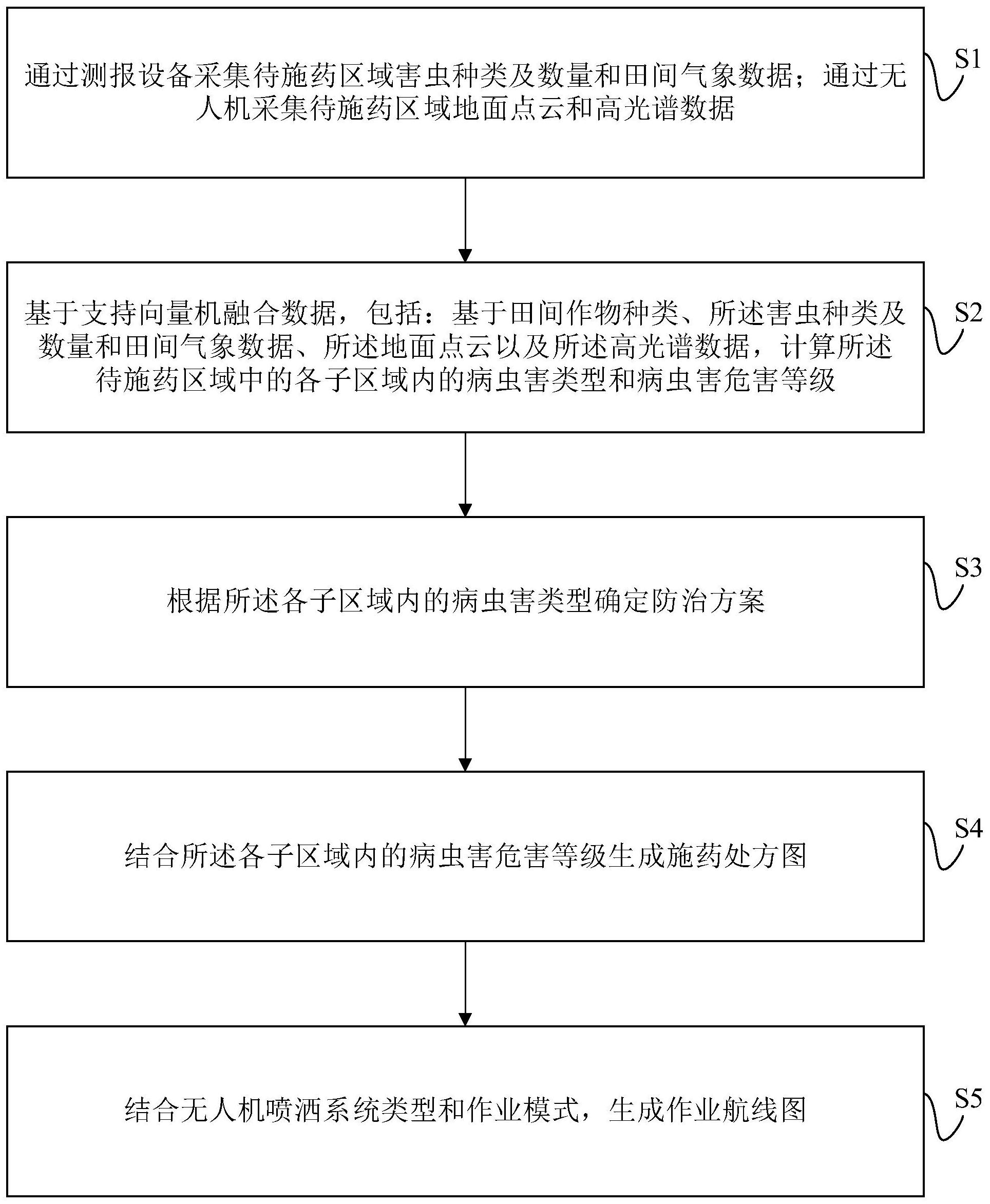
本发明实施例提供一种无人机的航空施药航线生成方法及系统,用以克服现有技 术在无人机的航空施药航线生成方面存在的自动化程度不高、施药方案制定过于主观化、 统一化的缺陷。 第一方面,本发明实施例提供一种无人机的航空施药航线生成方法,主要包括: 通过测报设备采集待施药区域害虫种类及数量和田间气象数据;通过无人机采集 待施药区域地面点云和高光谱数据;基于支持向量机融合数据,包括:基于田间作物种类、 害虫种类及数量和田间气象数据、地面点云以及高光谱数据,计算待施药区域中的各子区 域内的病虫害类型和病虫害危害等级;根据各子区域内的病虫害类型确定防治方案;结合 各子区域内的病虫害危害等级生成施药处方图;结合无人机喷洒系统类型和作业模式,生 成作业航线图。 优选地,上述通过测报设备采集待施药区域害虫种类、数量和田间气象数据,包 括:构建由分布于每个子区域内的害虫诱捕测报设备和田间气象测报设备组成的病害虫监 测网络;每个害虫诱捕测报设备用于诱捕害虫并分类计数,获取待施药区域害虫种类及数 量;田间气象测报设备用于获取子区域的田间气象数据,包括空气温度、空气湿度、风速、风 4 CN 111582055 A 说 明 书 2/10 页 向、气压和降雨量;害虫诱捕测报设备包括3种,按害虫分类计数可信度自低至高分别为:基 于光诱的广谱害虫拍照测报设备、基于性诱的害虫无拍照诱捕设备、基于性诱的害虫诱捕 拍照设备;将基于性诱的害虫诱捕拍照设备获取的害虫图像输入至病虫害识别神经网络训 练集中,并用病虫害识别神经网络训练集完成对病虫害识别神经网络模型的预训练;将基 于光诱的广谱害虫拍照测报设备获取的害虫图像输入至已训练完成的病虫害识别神经网 络模型中,搜索识别害虫并获取所述害虫种类及数量;将每个子区域内的田间气象数据、测 报设备类型、害虫种类及数量进行汇总,获取待施药区域的害虫种类及数量和田间气象数 据。 优选地,上述通过无人机采集待施药区域地面点云和高光谱数据,包括:在无人机 上挂载激光雷达和高光谱相机;利用激光雷达获取待施药区域的地面点云,地面点云用于 计算生物量数据;利用高光谱相机获取待施药区域的高光谱数据,高光谱数据用于识别病 虫害带来的植物叶片光谱特征变化,并根据植物叶片光谱特征变化确定所述待施药区域的 病虫害数据。 优选地,在将每个子区域内的田间气象数据、测报设备类型、害虫种类及数量进行 汇总之前,还包括:利用田间气象测报设备的测量结果与害虫诱捕测报设备的测量结果所 得置信度构建支持向量机,并应用AdaBoost算法融合多个向量机输出结果,获取通过第一 分类器的害虫分类计数数据,具体为:利用每个子区域内的空气温度、空气湿度、风速、风 向、气压和降雨量分别与各害虫种类及数量置信度构建多重支持向量机; 基于AdaBoost算法融合多重所述支持向量机输出结果,构成所述第一分类器的害 虫分类计数数据。 优选地,上述基于田间作物种类、害虫种类及数量和田间气象数据、地面点云以及 所述高光谱数据,计算待施药区域中的各子区域内的病虫害类型和病虫害危害等级,包括: 基于所述通过第一分类器的害虫分类计数数据和生物量数据构成支持向量机形 成第二分类器;利用第二分类器,滤除生物量数据不合理的害虫分类计数数据;基于通过第 二分类器的害虫分类计数数据和导致植物叶片特征光谱变化的病虫害数据构成支持向量 机,形成第三分类器;利用第三分类器,根据高光谱数据确定的所述待施药区域的病虫害数 据,滤除不合理的害虫分类计数数据;根据第三分类器输出的害虫分类计数数据,计算待施 药区域中的各子区域内的病虫害类型和病虫害危害等级。 优选地,在根据所述各子区域内的病虫害危害等级确生成动态的施药处方图之 后,还包括:使用图像形态学方法以所述施药处方图中的面积较大处方区块侵蚀周边区块, 直至消除所述施药处方图中面积小于最小可施药面积的小面积施药区,以完成对施药处方 图的优化;最小可施药面积是根据无人机施药响应特性确定。 优选地,上述结合无人机喷洒系统类型,生成作业航线图,具体包括:为加载变量 施药系统的无人机生成定航速变量施药航线图,或为加载定量施药系统的无人机生成变航 速施药航线图。 第二方面,本发明实施例提供一种无人机的航空施药航线生成系统,主要包括:数 据采集单元、病虫害数据提取单元、防治方案确定单元、施药处方图确定单元和作业航线图 确定单元,其中: 数据采集单元主要用于获取通过测报设备采集的待施药区域的害虫种类及数量 5 CN 111582055 A 说 明 书 3/10 页 和田间气象数据以及通过无人机遥感采集的待施药区域的地面点云和高光谱数据; 病虫害数据提取单元主要用于基于支持向量机融合数据,包括:基于田间作物种 类、害虫种类及数量和田间气象数据、地面点云以及高光谱数据,计算待施药区域中的各子 区域内的病虫害类型和病虫害危害等级; 防治方案确定单元主要用于根据各子区域内的病虫害类型确定防治方案; 施药处方图确定单元主要用于根据各子区域内的病虫害危害等级确生成施药处 方图; 作业航线图确定单元主要用于结合无人机喷洒系统类型,生成作业航线图。 第三方面,本发明实施例提供一种电子设备,包括存储器、处理器及存储在存储器 上并可在处理器上运行的计算机程序,其中,处理器执行所述程序时实现如第一方面任一 所述的无人机的航空施药航线生成方法的步骤。 第四方面,本发明实施例提供一种非暂态计算机可读存储介质,其上存储有计算 机程序,该计算机程序被处理器执行时实现如第一方面任一所述的无人机的航空施药航线 生成方法的步骤。 本发明实施例提供的无人机的航空施药航线生成方法及系统,通过获取现场监测 数据、点云数据和高光谱数据,利用气象数据和生物量数据,建立基于支持向量机的多重分 类器校正害虫诱捕数据和高光谱数据提升了病虫害识别精度,同时自动推荐防治方案并形 成可操作处方图和作业航线,实现了航空精准施药,有效的提升了无人机喷洒系统的自动 化和智能化作业能力。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他的附图。 图1为本发明实施例提供的一种无人机的航空施药航线生成方法流程示意图; 图2为本发明实施例提供的一种无人机的航空施药航线生成系统的结构示意图; 图3为本发明实施例提供的一种电子设备的实体结构图。











