
技术摘要:
本发明公开一种面向离散接收功率的动态精度无线定位方法,包括如下步骤:步骤1、构建静态定位的指纹数据库:步骤2、依据指纹单元的相近程度,通过迭代反复分割高差异度的指纹单元,进行动态调整、提高指纹单元的定位精度,重建指纹数据库;步骤3、根据欧式距离判断目标 全部
背景技术:
近十年,基于位置服务(LBS)的社会价值和商业价值引起了人们的高度关注。如: 商场的产品推送、家庭安防、病患的护理与健康追踪等方面的应用日益成熟。虽然,全球定 位系统(GPS)、北斗卫星导航系统能够提供较高的户外定位精度,但在相对封闭的室内环境 下定位精度极度下降,很难满足一般应用的需求。因此,催生出新的研究领域----室内定 位。红外、超声波(US)、射频(RF)、调频、地磁场、超宽带、WiFi等无线通信技术,被大量的应 用到室内定位应用系统中。其中,基于目标点与已知锚点之间位置距离关系的测距技术是 在室内定位系统中应用最广泛的技术之一。传输信号的功率、时间和角度等传统物理,常常 作为室内位置测量方法中计算的对象,并提出了诸如:基于信号到达时间(TOA)、到达角 (AOA)、到达时间差(TDOA)的多种方法。 基于指纹标签的定位技术,是另一种被广泛应用在室内定位系统中的技术。特别 是商用WiFi设备和基础设施的普及程度越来越高,基于WiFi信号的指纹定位技术,深受研 究人员的关注。指纹定位技术,通常包括离线阶段和在线阶段两个部分。离线阶段,根据系 统中接收信号的强度(RSSI) ,通过大量的统计信息构建指纹标签的指纹库。在线阶段,获取 的当前待定位目标的RSSI值,并在已建立指纹库中寻找与其相匹配的指纹标签,进而达到 获得位置信息的目的。当离线阶段的指纹库构建精度越高、越准确时,在线阶段获得的定位 效果越好。当然,高精度的指纹库构建,伴随的是较高的人力成本与时间成本。 但是,目前的室内定位系统,无论是基于何种技术实施的,几乎都面临着传感器节 点的对能耗问题。节点的高能耗,逐渐成为限制室内定位系统应用的主要问题之一。因此, 追求低功耗、低成本的室内无线定位系统,寻求其相应的解决方案在理论方法研究与现实 应用方面都,有着极为重要的意义。 低成本、低功耗、弱感知型芯片的出现,如:Nordic Semiconductor公司的nRF24系 列芯片,为解决室内无线定位系统的高成本、高能耗问题,提供了新的途径。但是,由于低功 耗芯片的弱感知特性,芯片只能提供几个与接收距离相关的离散功率输出,而不是服从均 匀分布、正态分布等的连续信号,所以接收端无法测量收到信号的强度。因此,基于此类传 感器芯片的室内无线定位系统,在满足系统低功耗、低成本的同时,也对系统的定位效果提 出了新的挑战。目前急需一种提高定位精度的方法来解决上述问题。
技术实现要素:
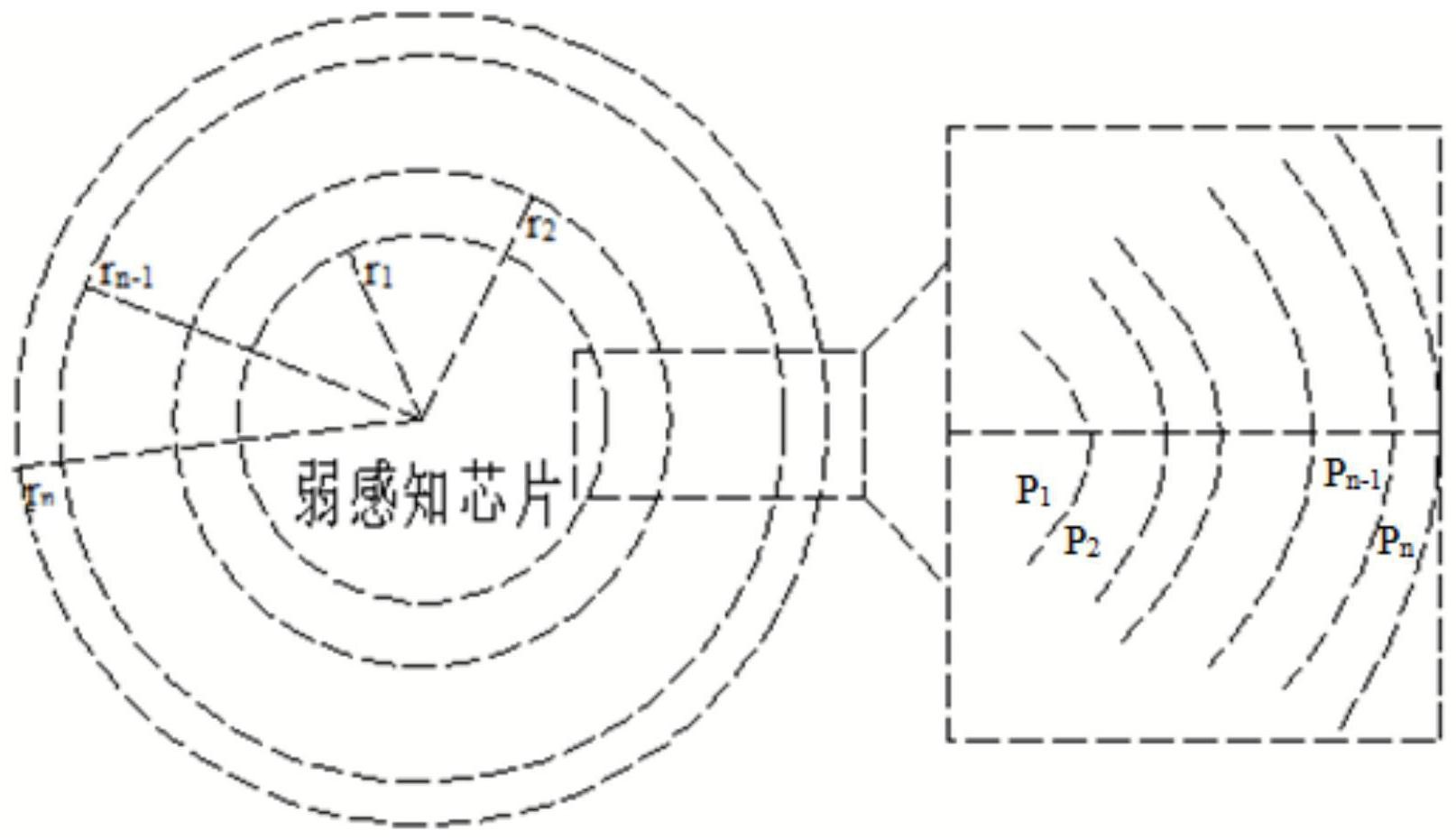
本发明的目的是提供一种面向离散接收功率的动态精度无线定位方法,以解决上 述现有技术存在的问题,降低成本的同时提高定位精准度。 为实现上述目的,本发明提供了如下方案:一种面向离散接收功率的动态精度无 4 CN 111601263 A 说 明 书 2/5 页 线定位方法,包括如下步骤: 步骤1、选取一个二维区域,将此区域划分为若干个单元格,将弱感知芯片传感器 作为参考节点,构建静态定位的指纹数据库; 步骤2、依据指纹单元与其相邻指纹向量的差异程度,通过迭代、反复分割得到高 差异度的指纹单元,进行动态调整、提高指纹单元的定位精度,重建指纹数据库; 步骤3、根据欧式距离判断目标节点的估计位置,计算前、后相邻位置估计候选点 间的概率值,建立运动路径上节点位置的概率树,并计算节点运动路径上的累计概率,最终 完成目标定位、确定节点的运动轨迹。 优选的,步骤1具体为: 步骤1.1、将一个R×R的二维区域,分割为初始边长为de×de的m个网格单元,并以 网格单元中心接收的参考点功率值表示指纹单元向量;随机部署n个能够真实反应位置的 弱感知芯片传感器,作为参考节点,将第i个参考节点的真实位置记为:Rposi=[xposi,yposi], i∈(1,2……n),弱感知芯片支持的L个可编程接收功率记为Pl,l∈(1,2……L),每个所述 可编程接收功率Pl相对应的接收距离为rl,l∈(1,2……L);当某一指纹单元超出任意弱感 知芯片的最大接收距离时,功率档位标记为PL 1; 步骤1.2、以网格中心点的指纹向量代替整个指纹单元格,根据欧式距离公式,计 算单元格与各个参考节点的距离,对照参考点芯片的功率档位接收距离,获得每一个单元 格的指纹向量,所述指纹向量记为Fki,k∈(1,2……,m),i∈(1,2……n),从而初始建立一个 指纹数据库。 优选的,步骤2具体为: 步骤2.1、引入一个标量δ作为单元指纹向量的评判指标,即:遍历指纹数据库;当 任意网格的指纹向量Fki与其物理相邻网格的指纹向量Fci差值的绝对值大于标量δ,则认定 为Fki是一个具有高差异度的指纹,进而对Fki做二次分割,将其划分为一个d×d的子指纹序 列, 其中, 完成指纹库遍历和子指纹划分后,重新构建一个含有不同单元格 大小,即不同定位精度的新指纹库; 步骤2.2、重复第3步,直到数据库内不含有高差异度指纹单元为止,最终获得一个 具有动态定位精度的指纹库。 优选的,步骤3具体为: 步骤3.1、通过测量得到目标节点在运动路径上不同位置的指纹向量Tk,通过计算 Tk与Fki的欧式距离,寻找目标点在每一个位置上可能的估计位置,其中k∈G,G表示指纹库 的集合; 步骤3.2、假设目标节点以固定速度V沿运动轨迹移动,在时间间隔t内,目标点移 动的距离d(vt)=V×t;将路径上每一位置的可能位置估计点,存储在候选点链表CanL中; 具体步骤如下:首先以当前位置j的某一候选点A为圆心,A∈CanL[j],d(vt)为半径做圆,其 面积记为:SA,再以目标点路径上下一位置j 1的任意候选点(B,C ,… ,J… ,M)为圆心,J∈ CanL[j 1],d(vt)为半径做圆,其面积记为SJ,SAJ表示SA与SJ相交的面积;并计算目标点前、 后位置圆的相交面积比值,得出其位置候选点A到J的概率PAJ,所述PAJ公式如下: 5 CN 111601263 A 说 明 书 3/5 页 步骤3.3、从目标点轨迹的起点至终点,逐层遍历由各位置候选点概率PAJ构成树, 当概率PAJ>η1时,引入路径增强因子E,当PAJ<η2时,引入减弱因子W,并通过计算路径各位置 候选点的最大累计概率,寻找具有动态定位误差路径的最优输出,其中,E>1,W<1,η1<1,η2< 1,且η1>η2; 所述弱感知芯片的接收功率为Pl,l∈(1,2……L,L 1);参考节点数目为n,并能够 获取其实际位置;δ为判别指纹网格单元是否为高差异度指纹的标量; 为二次分割后,新 指纹网格边长与被原高差异度指纹网格边长的关系系数,用以在逐次迭代中,动态缩小新 生成指纹网格边长,提高新指纹网格的定位精度, V为目标点的运动速度,视为常 量;t为时间间隔;CanL为存储目标点轨迹上各待定位位置候选点的链表;PAJ是时间间隔为t 时,目标点以速度V,从某一位置候选点A,移动到下一相邻位置候选点J的概率;η1,η2分别为 判断是否引入路径增强因子、减弱因子的标量,E>1,W<1,η1<1,η2<1,且η1>η2。 本发明公开了以下技术效果:基于低功耗、低成本、弱感知芯片传感器,能够在不 依赖传感器节点部署的环境下,降低指纹单元的差异度,动态提高室内定位系统的定位精 度,实现目标节点定位,并获得节点的最优运动轨迹,即实现室内精准定位。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为芯片功率档位关系示意图; 图2为指纹库构建方法流程图; 图3为遍历重构动态精度指纹库方法流程图; 图4为相邻位置候选点交叉区域概率示意图; 图5为目标移动路径优化方法流程图。











