
技术摘要:
本发明的实施方式所涉及的挖土机具有:下部行驶体;上部回转体,可回转地搭载于所述下部行驶体;致动器,搭载于所述下部行驶体或所述上部回转体;及控制装置,可限制所述致动器的动作,所述控制装置具有动作控制部,所述动作控制部判定该挖土机是否进入到对设置于施工 全部
背景技术:
以往,已知有如下施工机械,即,进行埋设物的检测,当存在附属装置与埋设物碰 撞的可能性时,进行使附属装置的动作减速停止或使附属装置回避埋设物的控制(例如,参 考专利文献1)。 现有技术文献 专利文献 专利文献1:美国专利申请公开第2008/0133128号说明书
技术实现要素:
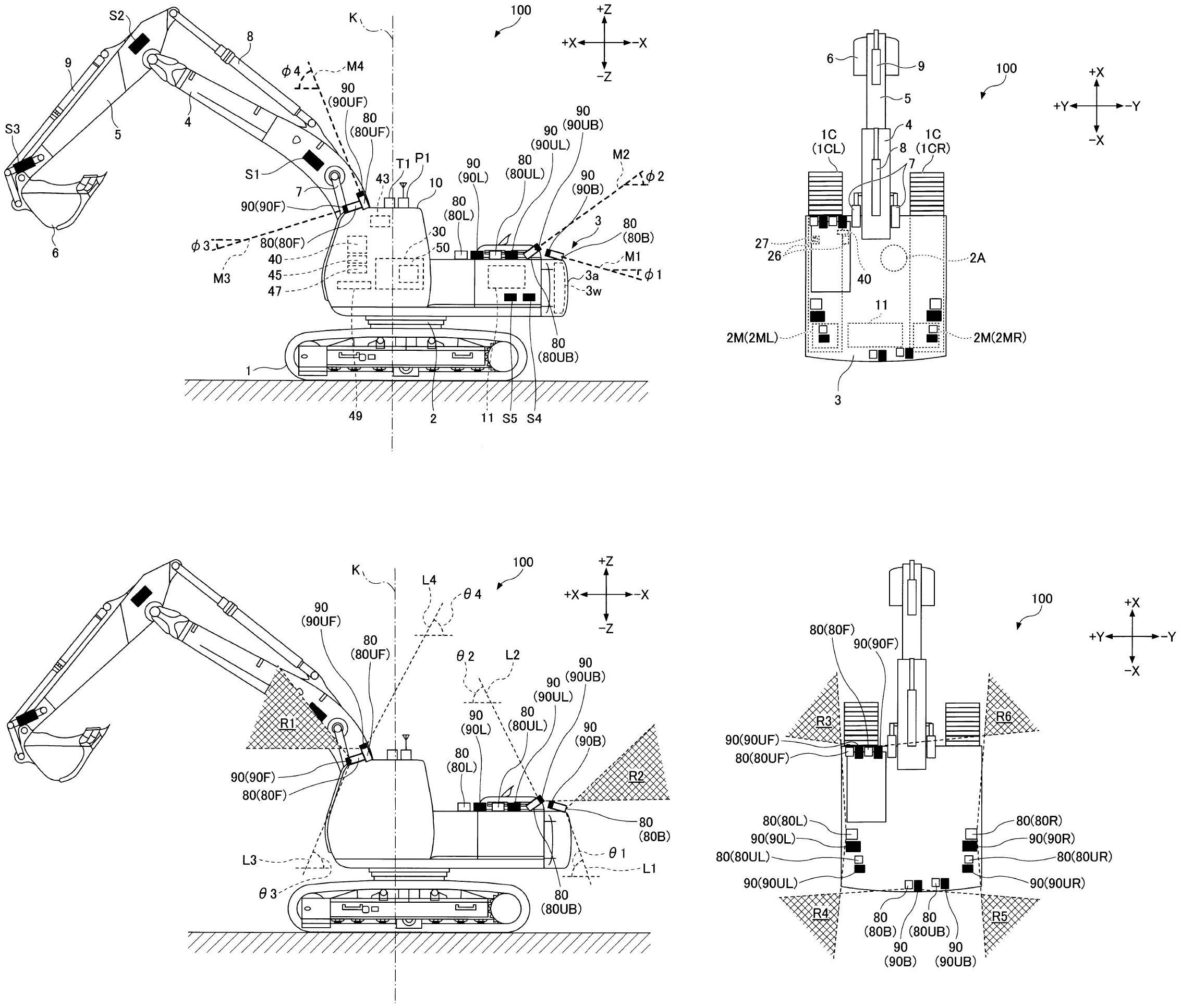
发明要解决的技术课题 然而,在工作现场,除了埋设物以外还存在电线杆、电线等障碍物,操作者需要注 意这种障碍物来驱动挖土机。因此,导致施工效率下降。 于是,鉴于上述课题,本发明的目的在于提供一种能够提高施工效率的挖土机。 用于解决技术课题的手段 本发明的实施方式所涉及的挖土机具有:下部行驶体;上部回转体,可回转地搭载 于所述下部行驶体;致动器,搭载于所述下部行驶体或所述上部回转体;及控制装置,可限 制所述致动器的动作,所述控制装置具有动作控制部,所述动作控制部判定该挖土机是否 进入到对设置于施工区域内的障碍物设定的禁止进入区域,当判定为该挖土机已进入时, 使该挖土机的动作减速或停止。 发明的效果 根据本发明的实施方式,能够提供一种可提高施工效率的挖土机。 附图说明 图1A是表示本发明的第1实施方式所涉及的挖土机的一例的侧视图。 图1B是表示本发明的第1实施方式所涉及的挖土机的一例的俯视图。 图1C是表示本发明的第1实施方式所涉及的挖土机的一例的侧视图。 图1D是表示本发明的第1实施方式所涉及的挖土机的一例的俯视图。 图2是表示图1A的挖土机的驱动控制系统的结构例的图。 图3是表示控制器及设备引导装置的结构例的框图。 图4是表示对配置于车道的挖土机设定禁止进入区域之前的配置图的图像的一例 的图。 图5是表示设定禁止进入区域之后的配置图的图像的一例的图。 图6是表示禁止进入区域设定处理的一例的流程图。 3 CN 111601934 A 说 明 书 2/25 页 图7是表示设定禁止进入区域之后的配置图的图像的另一例的图。 图8是包含图1A的挖土机的网络图。 图9是表示挖土机的外表面的结构例的图。 图10是表示控制器及设备引导装置的另一结构例的框图。 图11是表示控制器及设备引导装置的又一结构例的框图。 图12是表示本发明的第2实施方式所涉及的挖土机的一例的侧视图。 图13是表示挖土机的管理系统的结构例的概略图。 图14是表示CG动画的显示例的图。 图15是表示进行禁止进入区域设定处理时所显示的图像的结构例的图。 图16是表示进行禁止进入区域设定处理时所显示的图像的另一结构例的图。 图17是表示进行禁止进入区域设定处理时所显示的图像的又一结构例的图。











