
技术摘要:
本发明属于智能拐杖技术领域,公开了一种智能拐杖安全警示系统、警示方法及智能拐杖,智能拐杖安全警示系统包括:定位模块、数据传输模块、信息获取模块、安全距离判断模块、语音提示模块、通信模块、警报装置。本发明通过智能语音系统向周边行人寻求帮助,简单高效; 全部
背景技术:
目前,盲人的生活出行充满了困难。针对这一弱势群体的出行问题,目前已有一些 解决办法,但都存在较大的缺陷,比如饲养导盲犬、修建盲道和制作拐杖等等。对于导盲犬, 饲养成本太高,并且很多地方禁止导盲犬出入。对于盲道,目前缺乏完善的法律法规来规范 盲道建设,有时盲道还会被占用。 现有智能盲人拐杖外形在盲人拐杖上加以修改,利用导航技术、超声波技术、语音 模块、通信技术,在为盲人规划线路的同时,检测其周边障碍物位置通过语音提示反馈给盲 人,大大提升了盲人出行的便捷性。除此之外,在突发情况下可直接联系使用者家属或直接 报警,提升了盲人出行的安全性。 相比图像识别,通过智慧交通信号控制系统了解信号灯状态,会显得更加高效、准 确。智慧交通信号控制系统是基于交通大数据的智能化应用系统,该系统可根据各车道车 流量反馈信息利用一定的算法设置各信号灯的时间,通过将控制系统和控制中心相连接, 实现跨区域交通控制。随着通信技术和大数据的发展,将智能拐杖与信号灯控制中心数据 库相连接,便可以快速获取信号灯的状态及时长。 通过上述分析,现有技术存在的问题及缺陷为:(1)现有导航拐杖利用GPS技术定 位技术结合导航地图为盲人规划出行线路。然而,道路状况不是一成不变,它是一个不断调 整优化的过程。因此导航地图必须不断进行数据更新才能满足盲人的需求。 (2)现有智能盲人拐杖在为盲人提供便利的同时具有一定的局限性。目前有许多 街道,由于种种因素没有设置斑马线或者信号灯,即使在有信号灯和斑马线的交叉路口,也 可以不设置右转信号灯,在这种情况下,车辆右转可以不受限制。这些复杂的交通现象给盲 人过街带来了巨大的安全隐患。在盲人通过街道时,周边车辆与普通障碍物不同,具有速度 快、制动距离长、数量多等特点,简单地通过超声波测距已经无法实现避障功能。 (3)现有具备信号灯智能识别系统的新型智能盲人拐杖信号灯识别技术具有很大 的局限性,图像过滤技术、颜色传感器技术受环境影响较大,不能够精确定位信号灯的位置 和识别信号灯颜色变化。同时,现有智能拐杖只适应于人行道的正常通行,对于解决盲人过 街问题具有一定的局限性。 解决以上问题及缺陷的难度为:(1)在交通法规允许的情况下,转弯时司机对于车 道的选择取决于司机的个人意愿。考虑到少数情况,如果司机突然大幅度旋转方向盘,简单 的通过数学模型预测司机对于车道的选择意向结果与实际情况可能存在误差,对盲人的人 身安全造成威胁。 (2)机型车行经人行横道时,应减速行驶;遇到人正在通过人行横道,应该停车让 行。因此在进行安全距离测算模型时,选取的最大速度为检测范围内的司机行驶速度。然 5 CN 111583584 A 说 明 书 2/12 页 而,少数情况下,司机违反法律没有减速行驶或停车让行导致模型计算结果与实际不吻合, 智能拐杖将错误的信息反馈给盲人,可能会造成交通事故。 (3)由于盲人身边的车辆信息状况具有时效性,本作品对网络有较高的要求。一旦 智能拐杖网络延迟或卡顿,智能拐杖所反馈的信息便是无效的。 解决以上问题及缺陷的意义为:通过考虑现有智能拐杖和相关技术的不足,针对 盲人过街行为,致力于在保证盲人人身安全的情况下,解决过街可能遇到的一系列问题。 本发明以车道为研究对象,让盲人逐个车道通过街道。通过司机和盲人之间的信 息交互传递司机的车道选择意向给智能拐杖。解决了上述难度(1)。 本发明首先在盲人通过街道全程智能拐杖发出警报提示司机。其次,通过智能拐 杖对周边车辆的加速度测算判断司机有无减速让行。解决了上述难度(2)。 本发明利用5G技术代替4G技术,解决了上述难度(3)。
技术实现要素:
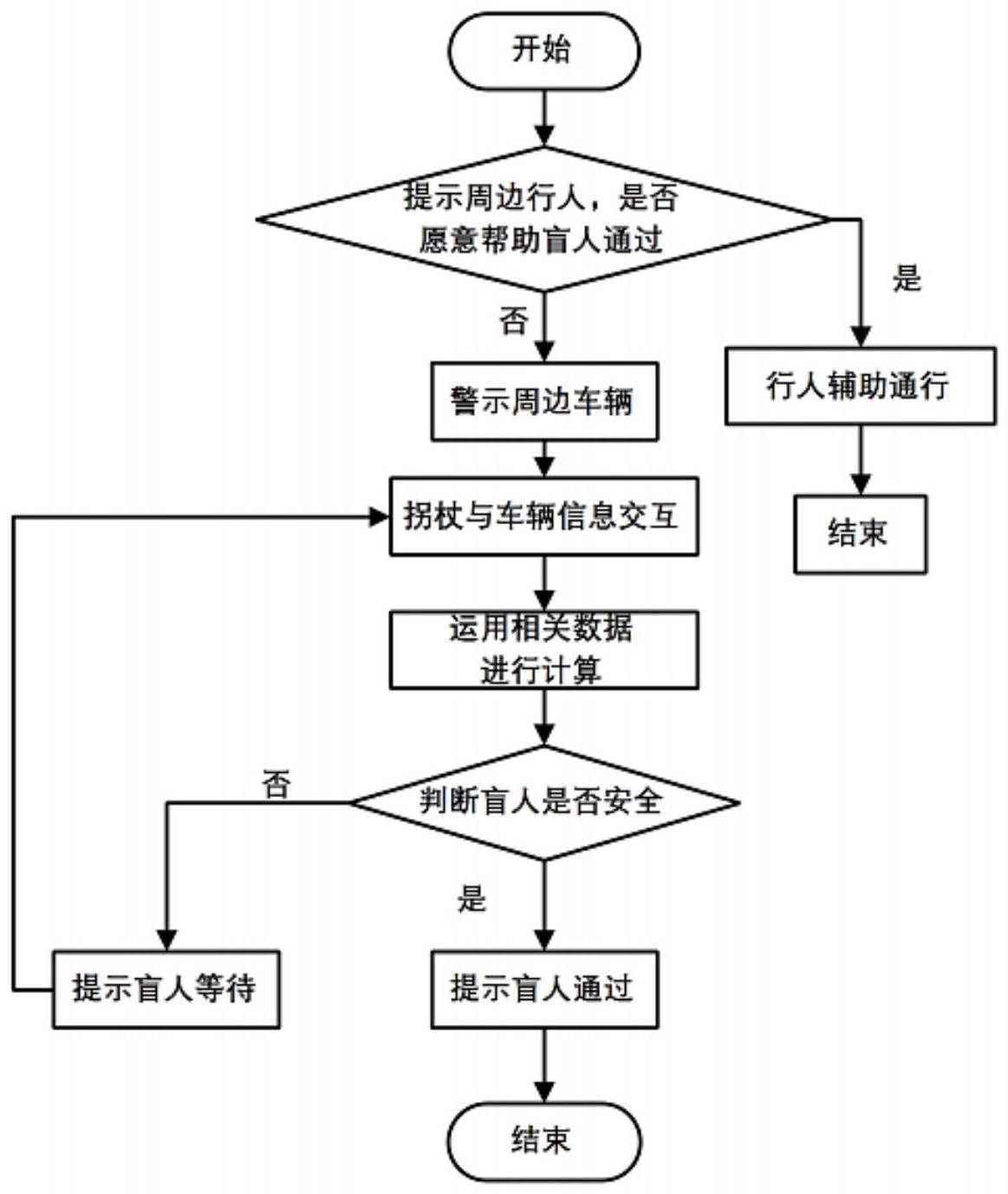
针对现有技术存在的问题,本发明提供了一种智能拐杖安全警示系统、警示方法 及智能拐杖,具体涉及一种针对盲人的过街的智能拐杖安全警示系统及方法。 本发明是这样实现的,一种智能拐杖安全警示方法,所述智能拐杖安全警示方法 包括以下步骤: 步骤一,智能拐杖发送有盲人通过街道的语音信号,若接收不到所述求助信号的 相应信息,所述智能拐杖发送引导盲人过街的指令,同时智能拐杖上的警示灯闪烁,对周边 环境进行提示;即通过语音提示周边行人有盲人通过街道,求助辅助通过,若无人响应,智 能拐杖开始引导盲人通过街道。警示灯开始闪烁提示周边司机,周边司机看到警示灯后减 速让行; 步骤二,基于通信技术和大数据,智能拐杖利用通信技术实现信号灯控制中心数 据库的信息交互,获取红绿灯状态的时长,判断道路状况是否允许行人通行; 步骤三,以网络RTK技术为前提,对盲人所处位置(即智能拐杖位置)进行准确定 位。利用车联网获得汽车相关数据,具体通过车联网通过其车载终端将车速、驾驶员操作行 为、动力系统工作参数和车辆位置等数据发送至云计算处理平台,对数据进行“过滤清洗”, 筛选出盲人即将通过车道的车辆。然后通过车道级高精度导航地图获得交通信号灯的位 置、车道线位置、车道宽度、道路标示线的类型,利用串口通信技术将数据接入程序中进行 有用数据筛选。 步骤四,在步骤三的基础上获取定位数据,然后通过计算程序进行盲人平均速度 计算;具体地通过线路的连接将RTK芯片的输入与程序芯片连接,利用串口通信技术将获得 的定位数据作为输入信号传递给程序芯片,通过程序计算,实现智能拐杖平均速度计算。 步骤五,以位置共享基础技术为前提,利用5G技术将车辆与智能拐杖各自的定位 信息上传至云计算数据平台进行数据筛选,实现车辆与智能拐杖之间的信息交互,通过串 口通信技术将数据接入智能拐杖中,得到智能拐杖与被测车辆的距离和车辆行驶速度。 步骤六,通过数学模型和程序对车辆与智能拐杖之间的安全距离进行测算,判断 如果智能拐杖正常通过该车道是否安全,并通过语音提示反馈给智能拐杖。 进一步,步骤三中,所述网络RTK技术通过在基准站设置接收器,基准站上获得的 6 CN 111583584 A 说 明 书 3/12 页 准确定位将通过数据链传输给移动站,移动站将以此作为参考对GPS数据修正,从而获得准 确的定位。 进一步,步骤六中,所述数学模型的建立方法包括: (1)安全距离测算 设L为车道宽,V1为盲人行走速度,V2为行车速度。则车辆的预计饱和行驶距离可表 示为 其中φ为安全空隙,安全空隙为常数,可按照性能最差的车辆参数进行计算。要使 盲人安全通过,则在盲人到达下一车道线时车还未驶过盲人的位置或刚刚到达,即 S*≤S0 (2) 其中,S0为测量车辆与智能拐杖(或盲人)的实际距离。 由于道路情况较为复杂,则计算使用距离取饱和距离,有 S*=MAX{S1,S2,...,Sn} (3) 针对不同道路状况,有以下讨论: 直线情况下,在一条车道上,当S相同时车与智能拐杖(或盲人)也有不同的距离 S实际,这里选择极端情况,即 弯道情况下,出现了汽车行驶距离S大于S实际的情况,即 十字路口情况下,S同样大于S实际,即 综上所述,则有 将式(1)带入上式得到: 若S*≤S0,则判定智能拐杖(或盲人)安全,可以通过,反之则提示智能拐杖(或盲 人)继续等待。 (2)安全加速度计算 盲人通过街道时,可能由于天气、司机没注意到盲人等特殊情况,驾驶员没有减速 让行。这种特殊情况就智能拐杖需要检测车辆有无减速意向,若没有,为了盲人的人身安全 起见,即使安全距离计算满足条件,仍然需要智能拐杖(或盲人)等待。 设车辆的初速度为Vn,行驶一段时间ΔT后,车辆的速度为Vm,则有加速度 如果A≥0,表示车辆处于一个加速或匀速状态,驾驶员并没有通过使车辆减速来 及时避让行人,提示智能拐杖(或盲人)继续等待。 (3)安全时间计算 盲人在斑马线上行走时,可能会出现绿灯时间不够的情况,针对此种情况,建立数 学模型,必要时提醒盲人加快步伐通过街道。 设智能拐杖(或盲人)到达斑马线末端的距离剩余X,智能拐杖(或盲人)平均行驶 7 CN 111583584 A 说 明 书 4/12 页 速度为V*,绿灯剩余时间T绿, 若满足式(7),则通过语音提示盲人加快步伐。 进一步,步骤五中,当盲人可以开始过街时,按下相应按钮,智能拐杖发出语音提 示周围行人附近有盲人准备过街需要辅助过街。如果盲人没有得到行人辅助,则按下相应 按钮,盲人借助现代智能科技手段自行过街,并只允许在车道线处停留;当绿灯时间不足以 让盲人到达对岸时,拐杖会提醒盲人加快步伐或者继续等待。 本发明的另一目的在于提供一种应用所述的智能拐杖安全警示方法的智能拐杖 安全警示系统,所述智能拐杖安全警示系统包括: 定位模块,用于通过网络RTK技术利用CORS,选取多组参考点,对参考点进行校核, 完成校核后系统便能获取准确的定位信息; 数据传输模块,用于通过线路的连接将RTK芯片的输入与程序芯片连接,将获得的 定位数据作为输入信号传递给程序芯片,实现拐杖定位; 信息获取模块,用于通过车联网利用传感技术感知附近车辆的状态信息,获得车 速、行驶状况和车辆位置;利用车道级高精度导航地图获得交通信号灯的位置、车道线位 置、道路标示线的类型; 安全距离判断模块,结合定位技术获得拐杖和车辆之间的距离,利用数学模型判 断盲人是否应该通过该车道; 语音提示模块,用于提醒盲人是否应该通过或者加快步伐;智能拐杖发出语音提 示周围行人附近有盲人准备过街需要辅助过街; 通信模块,用于通过5G网络与现代智能信息处理技术实现拐杖和车辆间的通信; 基于大数据和5G技术,将拐杖连接到信号灯控制中心数据库,实时获取信号灯的状态和时 长,实现拐杖与信号灯间的通信。 警报装置,与语音提示模块连接,用于对周边环境进行提示。 本发明的另一目的在于提供一种存储在计算机可读介质上的计算机程序产品,包 括计算机可读程序,供于电子装置上执行时,提供用户输入接口以实施所述的智能拐杖安 全警示方法。 本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所述指令 在计算机上运行时,使得计算机执行所述的智能拐杖安全警示方法。 本发明的另一目的在于提供一种施所述的智能拐杖安全警示方法的智能拐杖。 结合上述的所有技术方案,本发明所具备的优点及积极效果为: (1)本发明采用“以人为本”的原则,当盲人准备通过街道时,通过语音系统向周边 行人寻求帮助。如果周围没有行人或者不愿意帮扶,盲人可以选择自行过街。 (2)本发明以单个车道为研究对象,结合数学模型对安全距离进行计算,大大提升 盲人过街的安全性。 (3)本发明从多个层面考虑突发状况的发生,在盲人过街前通过警报装置提醒司 机减速让行,在安全距离判断模块通过测量车辆加速度有无减速让行,同时,在智能拐杖上 含有通信模块可供必要时刻盲人报警。 8 CN 111583584 A 说 明 书 5/12 页 (4)本发明基于大数据的发展,利用拐杖与信号灯控制中心数据库的信息通信获 取信号灯的状态,克服了原本图像识别受环境影响大、计算速度慢的缺点。 (5)本发明利用车道级高精度地图更加细致、准确,并通过RTK技术对车道级高精 度地图进行不断修正,提升了导航、计算的准确性。 (6)本发明用新型5G技术替代原本的4G技术,有效缓解了4G技术传输速度慢、网络 延迟的缺点。 (7)本作品考虑到红绿灯的时长可能能满足盲人正常通行,当检测到时间不足时, 通过提示盲人加快步伐来保证盲人安全过街。 (8)本发明可以将周边为减速让行的车辆数据上传给执法部门,作为交通违法抓 拍的手段。 附图说明 图1是本发明实施例提供的智能拐杖安全警示方法流程图。 图2是本发明实施例提供的智能拐杖安全警示系统结构图; 图中:1、定位模块;2、数据传输模块;3、信息获取模块;4、安全距离判断模块;5、语 音提示模块;6、通信模块;7、警报装置。 图3是本发明实施例提供的智能拐杖运行流程图。 图4是本发明实施例提供的智能拐杖全景图。 图5是本发明实施例提供的智能拐杖局部放大图。 图6是本发明实施例提供的智能拐杖工作路线图。 图7是本发明实施例提供的普通导航地图。 图8是本发明实施例提供的车道级高精度导航地图。 图9是本发明实施例提供的信息获取示意图。 图10是本发明实施例提供的安全距离示意图。 图11是本发明实施例提供的临界点示意图。 图12是本发明实施例提供的直线情况示意图。 图13是本发明实施例提供的弯道情况示意图。 图14是本发明实施例提供的十字路口情况示意图。 图15是本发明实施例提供的调查问卷截图; 图中:图(a)是调查问卷截图;图(b)是调查问卷分析图。 图16是本发明实施例提供的消费者对智能盲杖所能接收的最大价格扇形图。











