
技术摘要:
本发明描述一种用于识别在空间区域内的物体(150)的方法(400)。所述方法(400)包括:对于空间区域的多个单元(201)的每个单元:基于关于空间区域的传感器数据确定(401)对于一个单元(201)在当前时刻被占据、或未被占据或无法被占据的假设的显著程度;基于在先前时刻对于假 全部
背景技术:
车辆典型地具有多个不同的环境传感器,所述环境传感器设置用于关于车辆的环 境检测不同的传感器数据。示例性的环境传感器是雷达传感器、超声传感器、激光雷达传感 器、图像传感器等。基于车辆的所述一个或多个环境传感器的传感器数据,可以探测在车辆 的环境中的一个或多个物体(例如一个或多个其他的车辆)。
技术实现要素:
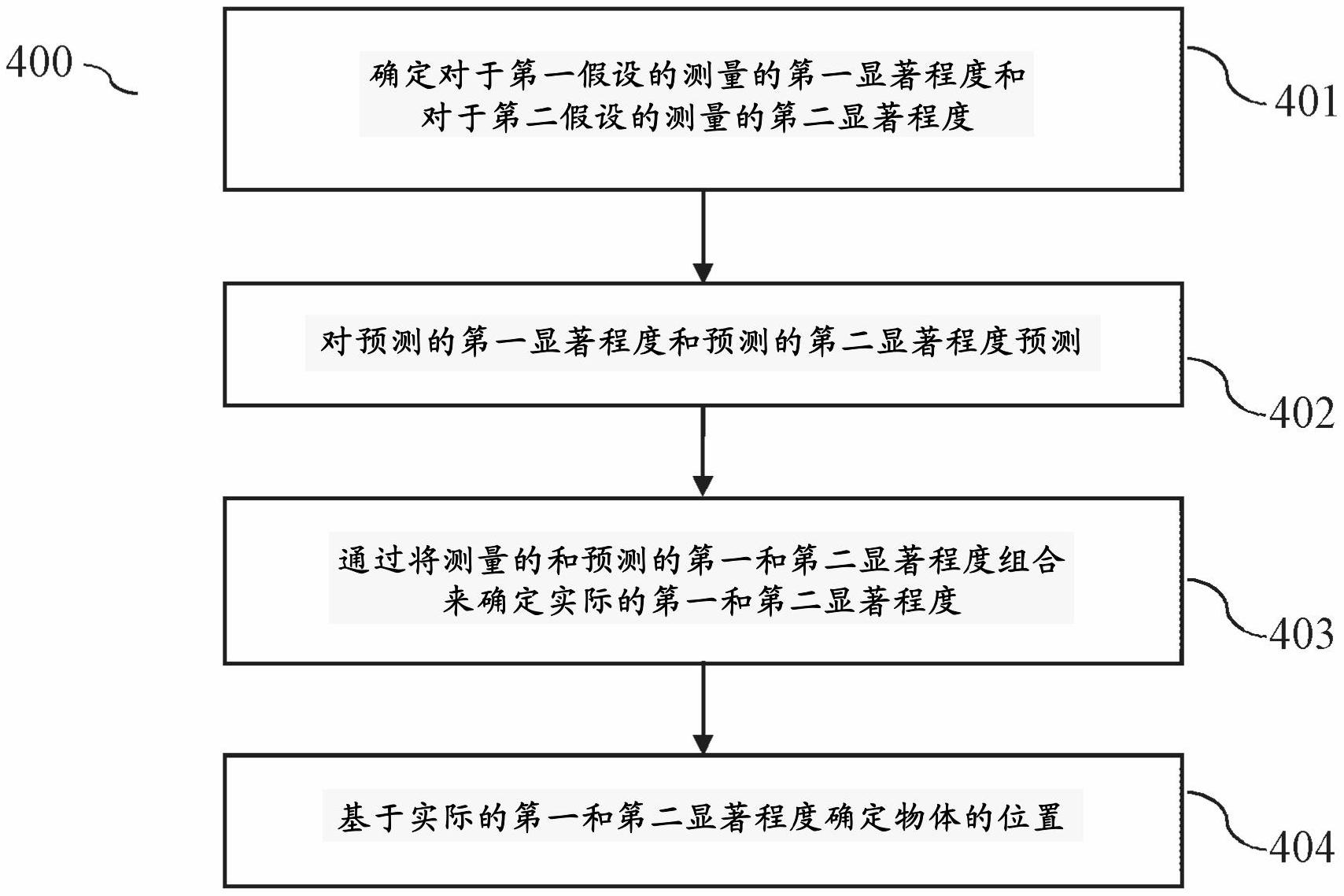
本文献涉及如下技术任务,即,提供一种方法和一种相应的处理单元,通过其能够 以精确并且鲁棒的方式探测和跟踪尤其是在车辆的环境中的物体。在此,特别的关注点在 于避免或减少通过暂时的遮盖引起的信息损失。 该任务通过独立权利要求解决。有利的实施形式主要在从属权利要求中说明。要 指出,从属于独立权利要求的权利要求的附加的特征没有独立权利要求的特征或只结合独 立权利要求的特征中的一部分可以形成单独的并且独立于独立权利要求的全部特征的组 合的发明,其可以成为独立权利要求、分案申请或在后申请的主题。这以相同的方式适用于 在说明书中所述的技术教导,其可以形成独立于独立权利要求的特征的发明。 按照一方面,说明用于识别在空间区域、尤其是在车辆的环境中的物体的方法。所 述方法包括:对于空间区域的多个单元的每个单元:基于关于空间区域的传感器数据确定 对于第一假设、即一个单元在当前时刻被占据的测量的第一显著程度和对于第二假设、即 所述单元在当前时刻未被占据或(至少暂时)无法被占据的测量的第二显著程度。此外所述 方法包括:对于所述多个单元的每个单元:基于在先前时刻对于第一假设的实际的第一显 著程度和基于对于第二假设的实际的第二显著程度以及基于对于该单元的用于相应的多 个运动假设的多个粒子来预测在当前时刻的对于第一假设的预测的第一显著程度和对于 第二假设的预测的第二显著程度。此外所述方法包括:对于所述多个单元的每个单元:通过 在当前时刻将测量的第一显著程度和测量的第二显著程度与预测的第一显著程度和预测 的第二显著程度组合,确定在当前时刻的实际的第一显著程度和实际的第二显著程度。此 外所述方法包括:基于对于所述多个单元的在当前时刻的实际的第一显著程度和实际的第 二显著程度确定在当前时刻物体在空间区域内的位置。 在所述方法的范围中,因此确定包括多个单元的栅格,其中,每个单元具有用于不 同的假设的实际的显著程度。在当前时刻的实际的显著程度在此通过预测基于在先前时刻 的实际的显著程度并且基于粒子过滤器确定。此外进行预测的显著程度与测量的显著程度 的合并和/或适配。这样能够实现空间区域的可靠的并且鲁棒的分类。尤其是可以通过在栅 格中在不同时刻测量的显著程度的积累减少或避免基于空间区域的部分区域的暂时的遮 6 CN 111587430 A 说 明 书 2/13 页 盖的信息损失。 按照另一方面说明一种处理单元,所述处理单元设置用于实施在本文献中所述的 方法。 按照另一方面,说明一种车辆、例如道路机动车(尤其是轿车或货车或公共汽车) 和/或可移动的机器人,其具有在本文献中所述的处理单元。 按照另一方面,说明一种软件(SW)程序。所述SW程序可以设置用于在处理器(例如 在车辆的控制器)上实施,并且以便由此实施在本文献中所述的方法。 按照另一方面说明一种存储介质。所述存储介质可以具有SW程序,所述SW程序设 置用于以便在处理器上实施,并且以便由此实施在本文献中所述的方法。 要注意,在本文献中所述的方法、装置和系统可以不仅单独而且结合其他的在本 文献中所述的方法、装置和系统使用。此外在本文献中所述的方法、装置和系统的任何方面 可以以多样化的方式相互组合。尤其是权利要求的特征可以以多样化的方式相互组合。 附图说明 此外借助实施例进一步说明本发明。在此示出: 图1示出包括多个不同的环境传感器的示例性的车辆; 图2示出车辆的环境的示例性的栅格; 图3示出栅格的单元的示例性的粒子; 图4示出用于探测物体的示例性的方法的流程图;以及 图5示出用于确定用于空间区域的占据栅格的示例性的方法的流程图。











