
技术摘要:
本发明公开了一种基于视觉点线特征与IMU紧耦合的室内自主定位方法。所述方法通过增加结构化建筑环境中丰富的线特征作为视觉约束能克服仅依赖点特征约束在弱纹理、光线变化剧烈的走廊等区域室内自主定位失效问题;通过增加了点线过滤提取策略和线特征的4参数正交表示进 全部
背景技术:
随着现代化大型复杂建筑群日益涌现以及人们在室内活动时间长、活动空间覆盖 范围广,人们急需室内定位导航技术提供定位服务、目的地路径规划引导服务、自主空间探 索定位导航等服务。例如消费人群在大型购物商圈寻找店铺位置,快递人员在结构化大型 建筑群进行配送时定位与路径规划,司机在大型地下停车场寻找停车位置,单兵或者消防 人员在紧急情况下搜寻复杂建筑群执行任务时都需要进行自主定位导航。可见行人室内自 主定位方法在生活以及公共安全等领域具有很重要的意义。 目前室内自主定位方法有超宽带(Ultra Wide Band,UWB)技术、地磁定位技术、视 觉同时定位与建图(Simultaneous Localization and Mapping,SLAM)技术、基于惯性测量 单元(Inertial Measurement Unit,IMU)航迹推算技术等。然而,由于UWB技术传播过程容 易受物体遮挡、反射等影响且需要事先布置设备,地磁定位技术容易受外界通信干扰影响, 均不适合室内自主定位需求。IMU航迹推算具有不受外界干扰且自身响应频率高的优点,然 而低精度的IMU器件存在零偏,单纯依靠积分进行航迹推算在长时间情况下很容易发散。视 觉定位技术因单目相机成本低廉,通过特征点匹配的多视图几何约束测量旋转和平移,长 时间测量下不会产生累积误差,然而视觉受场景条件约束大,如室内光照、纹理丰富度等条 件,相机在快速运动下点特征容易跟丢导致匹配失效。 现有的以点特征为主的视觉定位技术主虽然在纹理丰富的特定场景能够执行定 位需求,但是大型建筑结构化环境下,通常存在弱纹理区域,如走廊通道里大面积的白墙。 且小区域范围的通道内可能光线变化剧烈。这些真实存在的场景条件都将导致基于点特征 的视觉定位技术无法正常工作。然而在结构化建筑环境下,线特征丰富且更好地表征了室 内环境,通过引入线特征与点特征结合的视觉定位技术,将能够很好地克服点特征在弱纹 理走廊、光线剧烈变化等场景失效的问题。然而现有的线特征提取策略只能机械地提取所 有线特征,结构化建筑环境下大量不必要的线特征被提取不仅增加了计算量且在线特征及 其丰富的区域容易导致误匹配。传统的线特征利用普吕克坐标表示法需要6个参数,然而三 维空间的直线是4个自由度,这在优化过程中额外的自由度将导致计算量的增加和数值求 解的不稳定性。且室内行人具有运动状况复杂的特征,特别是单兵在执行消防任务等紧急 任务时,需要快速运动,单纯的视觉点特征匹配可能暂时失效。如何实现有效的点线特征结 合同时又能弥补视觉定位技术失效问题,从而提供一种快速、准确的室内自主定位技术是 需要解决的问题。
技术实现要素:
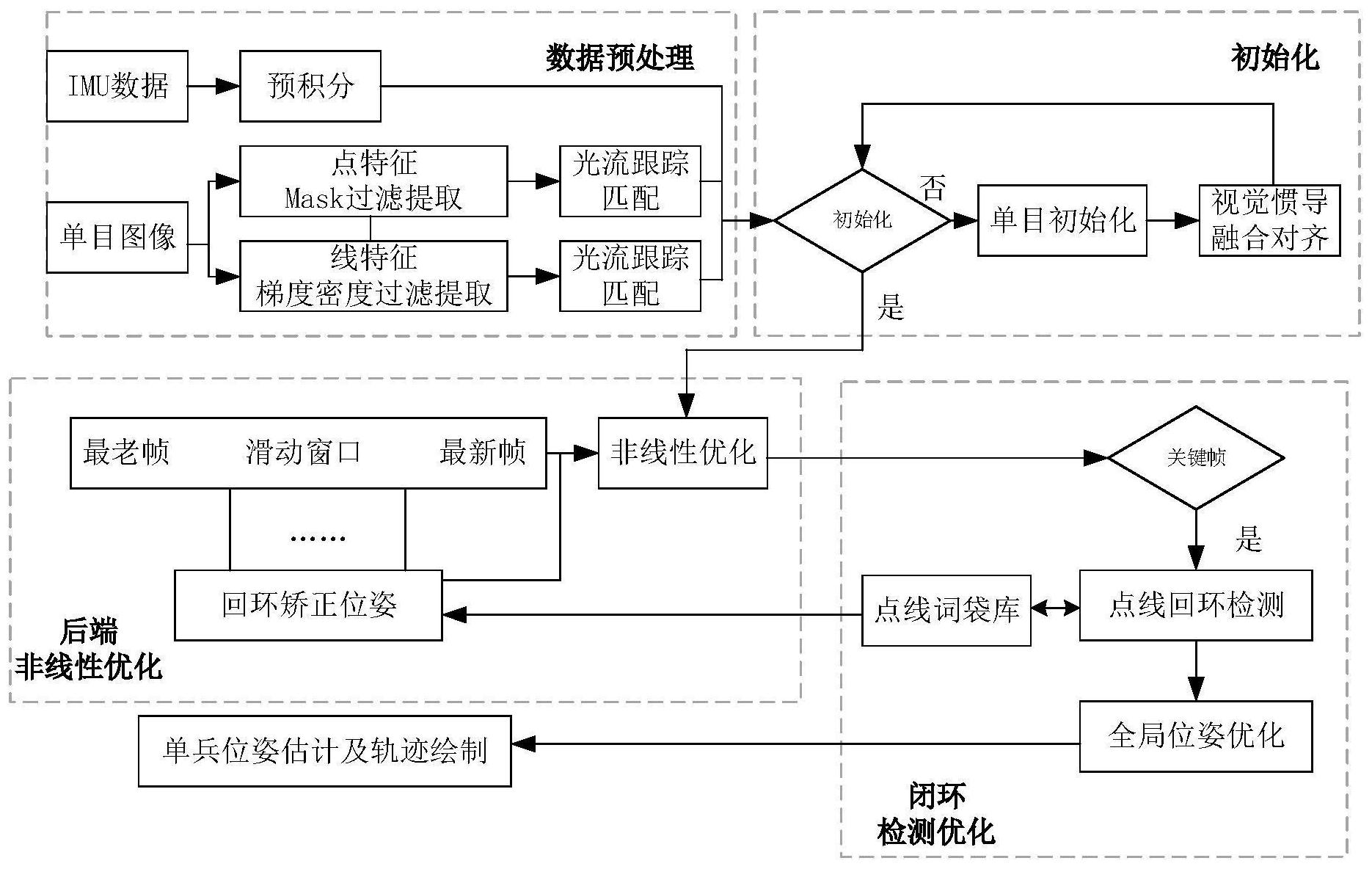
发明目的:针对现有技术的问题,本发明提出了一种基于视觉点线特征与IMU紧耦 6 CN 111595334 A 说 明 书 2/7 页 合的单兵/行人室内自主定位方法,能够提高单兵/行人室内自主定位的精确性和鲁棒性, 满足在弱纹理、光线变化剧烈的走廊等各种大型结构化建筑室内场景定位的需求,以及适 应单兵在执行消防任务等紧急任务时需要快速运动等需求。 技术方案:本发明提供一种基于视觉点线特征与IMU紧耦合的室内自主定位方法, 包括以下步骤: S1,对获取的IMU数据进行预积分处理; S2,对获取的单目图像数据,构建Mask过滤机制获取点特征; S3,对获取的单目图像数据,构建梯度密度过滤机制获取线特征; S4,对步骤S2提取的点特征和步骤S3提取的线特征进行KLT光流跟踪匹配; S5,先利用SFM进行单目视觉估计滑窗内所有帧的位姿以及路标点的逆深度,再通 过视觉与IMU预积分融合对齐,紧耦合初始化求解初始化参数; S6,在利用6参数普吕克坐标系表示线的初始化、三角化的基础上,提出利用在4参 数正交坐标系中进行线特征的图优化; S7,利用滑窗内的视觉点线特征约束、IMU约束、先验约束,一起构建残差目标函数 进行非线性优化,求解滑窗中所有帧的状态量; S8,根据关键帧的点线特征进行回环检测,与构建的点线词袋库匹配,并对滑窗状 态进行反馈矫正; S9,经过全局优化输出室内单兵/行人位姿估计。 有益效果:本发明通过增加结构化建筑环境中丰富的线特征作为视觉约束能克服 仅依赖点特征约束在弱纹理、光线变化剧烈的走廊等区域室内自主定位失效问题;通过增 加了点线过滤提取策略和线特征的4参数正交表示进行图优化,能够克服线特征的误匹配 问题和不必要的计算量以及过参数线特征表示导致的优化求解过程的不稳定性问题;且引 入IMU数据与视觉点线特征紧耦合的机制,能克服纯视觉在单兵执行任务快速运动、旋转等 情况自主定位失效问题。总体上提升了单兵/行人室内自主定位系统的精度和鲁棒性。 附图说明 图1为本发明方法实施例的流程图; 图2为本发明所构建梯度密度过滤机制剔除线特征密集区域后的线特征提取效果 图; 图3为本发明线特征初始化示意图; 图4位本发明方法在弱纹理走廊提取点线特征效果图; 图5为传统方法在楼宇内真实环境弱纹理通道里进行上下楼实验的定位结果图; 图6为本发明方法在楼宇内真实环境弱纹理通道里进行上下楼实验的定位结果 图。











