
技术摘要:
本发明提供一种地铁高空接触网检修作业车。所述地铁高空接触网检修作业车包括:承载辆所有部件安装基础的车架、收容于所述车架中部的机器间内部的动力及动力辅助系统、临近所述动力及动力辅助系统且和所述动力及动力辅助系统驱动连接的传动系统、和所述传动系统驱动连 全部
背景技术:
随着我国城市轨道交通规模、运营速度、运营里程及运营频率等方面不断提升,线 路养护,检修工作量随之增大,对满足城轨线路检修工程车辆的需求不断增加。为满足地铁 及城轨线路作业施工实际需求,研制更具环保性和经济性的地铁高空接触网检修作业车势 在必行。 因此,有必要提供一种新的地铁高空接触网检修作业车解决上述技术问题。
技术实现要素:
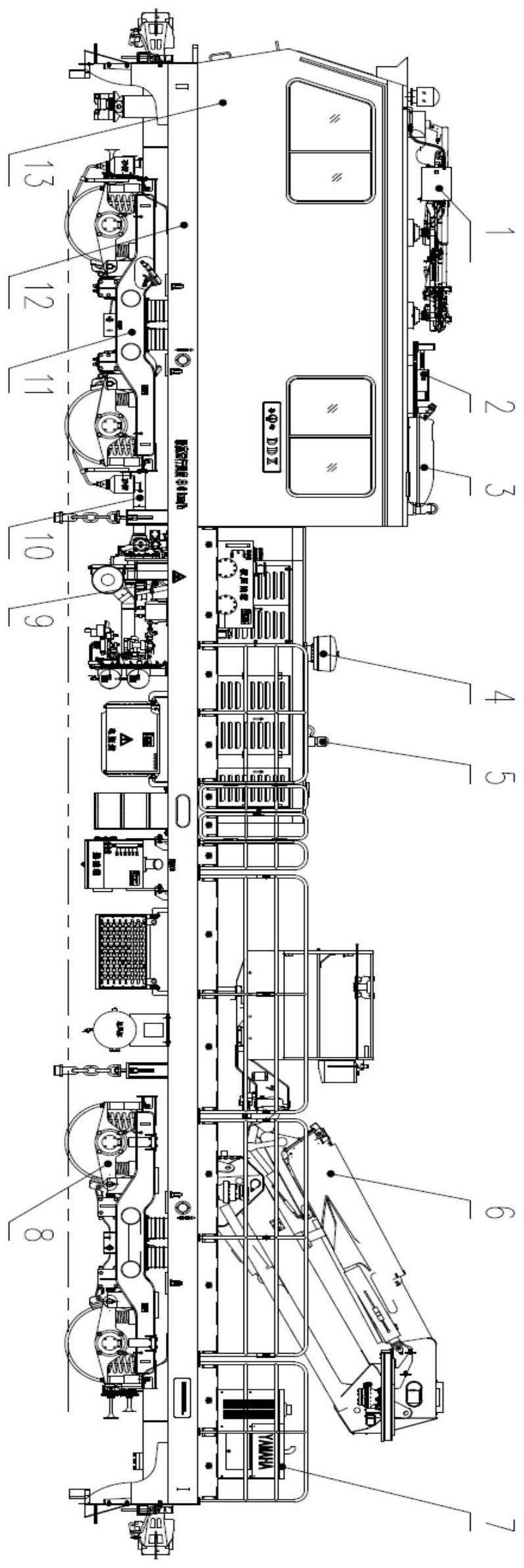
本发明提供一种既可以满足接触网检修及日常保养和接触网检测,也可以满足高 空作业的需求的地铁高空接触网检修作业车。 本发明提供的地铁高空接触网检修作业车包括:包括:承载辆所有部件安装基础 的车架、收容于所述车架中部的机器间内部的动力及动力辅助系统、临近所述动力及动力 辅助系统且和所述动力及动力辅助系统驱动连接的传动系统、和所述传动系统驱动连接的 走行部及设于车架一端的作业装置;所述作业装置包括曲臂式作业平台和接触网检测装置 及刚性悬挂自动巡查装置。 优选的,所述动力及动力辅助系统包括设于所述车架底部的发动机、设于所述车 架右侧的发动机排气装置和液力油散热器、收容于所述机器间内有发动机进气装置和水 箱、设于车架下部的供油系统。 优选的,还包括设于所述车架另一端的司机室,所述司机室内设置双端司机操纵 台,所述司机室前、后端设置行车安全挡风玻璃,并配有喷水式刮雨器,室内设置司机座椅、 接触网检测控制柜、乘客座椅、空调,所述司机室后端设有一个通往后平台的车门。 优选的,所述传动系统悬挂安装于车架中部,且与发动机输出端连接的液力传动 箱,及所述转向架包含的车轴齿轮箱、轮对;所述液力传动箱输出端通过传动轴与车轴齿轮 箱输入端连接。 优选的,所述走行部采用包括第一转向架和第二转向架的两轴通用式转向架;所 述第一转向架为不带车轴齿轮箱的非动力转向架,所述第二转向架为带车轴齿轮箱的动力 转向架,所述第一转向架和第二转向架的构架与轴箱之间、所述第一转向架和第二转向架 与车架之间均设有安全连接装置,在车辆吊装或起复时无需捆扎,所述第一转向架轴箱与 的构架之间设有一系锁定装置,所述第一转向架的构架与车架之间设有二系锁定装置,避 免车辆在调平工况下作业时整车倾覆。 优选的,还包括液压系统;所述液压系统包括散热驱动液压系统和作业平台液压 系统;所述散热驱动液压系统齿轮泵安装在所述发动机取力口上,为液力油散热提供动力; 4 CN 111572572 A 说 明 书 2/5 页 作业平台液压系统设有应急泵站,在主柴油机故障的情况下,可以通过应急泵站在15mi n 将曲臂式作业平台收回至初始位置。 优选的,还包括制动系统,所述制动系统采用JZ-7G型制动机,空气管路设置有空 气净化单元,将螺杆空压机所供压缩空气过滤后储存至安装在车架下部的总风包内,保障 控制制动系统供风正常,并保证各阀件工作的可靠性。 优选的,还包括电气系统,所述电气系统包括直流系统和交流系统;所述直流电气 系统,主要包括直流蓄电池、整车直流照明及电气控制系统;所述交流系统,包含安装在后 平台的交流发电机组为司机室内空调和电暖器、安装于车架两端及平台外接插座、作业平 台液压系统应急泵站等供电。 优选的,所述曲臂式作业平台包括一回转机构、主臂、连杆、二回转机构、伸缩臂、 连接体、三回转机构及作业平台;所述一回转机构安装于车架上,旋转范围180°(±90°),是 连接机具和机车的主要部件;所述二回转机构旋转范围540°(±270°);所述伸缩臂铰接于 二回转机构上,是实现平台举升高度的最有效部件,臂体间通过伸缩动作将平台举升到一 定高度或侧向伸出至一定幅度;所述作业平台安装于伸缩臂尾部,是承载工作人员的部件, 平台内设照明、电源等设施,保证施工需要;作业平台与臂体连接处设三回转,作业平台 180°(±90°)旋转,扩大作业范围;机器间上部设有安装有三色运行灯,可以实时警示曲臂 式作业平台工作状态;所述曲臂式作业平台具备平台上遥控器和平台下主控制箱两套控制 装置可控制平台完成各项动作,两套控制装置互锁。 优选的,还包括模拟受电弓、接触网检测装置和刚性悬挂自动巡查装置,所述接触 网检测装置安装于所述司机室顶部,适用于城市轨道交通电气化铁路刚柔性悬挂接触网参 数综合检测,用于对被测线路检修后的动态复核、综合质量评定及故障诊断提供指导依据; 所述刚性悬挂自动巡查装置安装于所述司机室顶部,用于地铁刚性悬挂设施的安装、维修 作业后的动态检测及日常检查核实。 优选的,还包括电气控制系统;所述电气控制系统采用基于CAN 以太网双层分布 式网络控制技术,充分利用发动机基于J1939协议的通信控制策略,基于CAN总线分布式网 络控制原理,采用DSP、ARM芯片作为主要处理核心;显示模块、多路CAN总线模块、AI采集模 块、DI采集模块和DO输出模块,相互之间通过CAN总线实现数据交互,其遵循CAN2.0B协议, 同时,多路CAN总线模块通过CAN总线和动力单元实现数据交互,其遵循SAE J1939协议。 优选的,所述车架两端安装有车钩及缓冲装置,用于其他轨道车辆连挂牵引。 与相关技术相比较,本发明提供的地铁高空接触网检修作业车具有如下有益效 果: a)整车为满足地铁与城轨车辆限界的四轴液力-机械传动的地铁高空接触网检修 作业车; b)整车布置形式为前端为司机室,后端为机器间和曲臂式作业平台,接触网检测 装置及刚性悬挂自动巡查装置安装在司机室顶部; c)整车带有曲臂式作业平台、受电弓(选用)、接触网检测装置及刚性悬挂自动巡 查装置(选用)等检修作业装置,既可以进行接触网检修及日常保养和接触网检测,也可以 进行高空作业; d)电气控制系统采用网络模块控制系统,设有发动机控制、走行与制动控制、各工 5 CN 111572572 A 说 明 书 3/5 页 况安全保护控制、辅助控制、参数显示与故障报警和远程监控系统等功能,保障该车运行安 全、可靠; e)曲臂式作业平台采用三个回转机构,作业范围更大,收车高度较低,满足作业需 求的同时满足地铁线路限界要求。 附图说明 图1为本发明提供的地铁高空接触网检修作业车的主视图; 图2为本发明提供的地铁高空接触网检修作业车的俯视图; 图3为本发明曲臂式作业平台作业范围图; 图4为本发明提供的地铁高空接触网检修作业车的仰视图。











