
技术摘要:
本发明公开了低真空系统持续充入工作气体时的动态压力精确控制系统,包括真空室、真空泵组、真空抽气管道阀门组件、工作气体输入单元、调节气体输入单元、压力测量单元和电气控制单元,真空泵组通过真空抽气管道对真空室抽取真空。工作气体输入单元包括电磁阀Ⅰ、质量 全部
背景技术:
在临近空间和等离子体研究领域,要建立实验需要的真空环境,与常规真空系统 内部的真空环境不同,该真空环境需要在系统抽取真空的同时,还需要充入工作气体(如氩 气、氢气、氦气等),工作气体充入流量需可控可调,在此状态下,系统的真空度指标需满足 设定目标,其真空度一般为1Pa~1000Pa量级,并需实现精确控制。因工作气体为要求的充 入流量范围内任意值,真空度目标值需满足一定范围内的任意压力设定值,所以真空抽气 系统的有效抽速需要进行一定范围内的任意调节,对于抽气系统的真空泵而言不具备任意 调节抽速的能力,而采用阀门进行真空流导调节,因阀门开度与流导为非线性关系,且阀门 的阀板频繁运动,调节可靠性差。因此,设计一种低真空抽气系统持续充入工作气体时的动 态压力精确控制系统很有必要。 低真空抽气系统持续充入工作气体时的动态压力精确控制系统采用了新的技术 途径,不需对真空泵进行抽速调节,不需要对真空泵泵口阀门开度进行调节,通过在真空泵 抽气口充入调节气体的方式,可实现真空泵组抽气负载的调节,从而实现对系统的动态压 力进行精确控制。
技术实现要素:
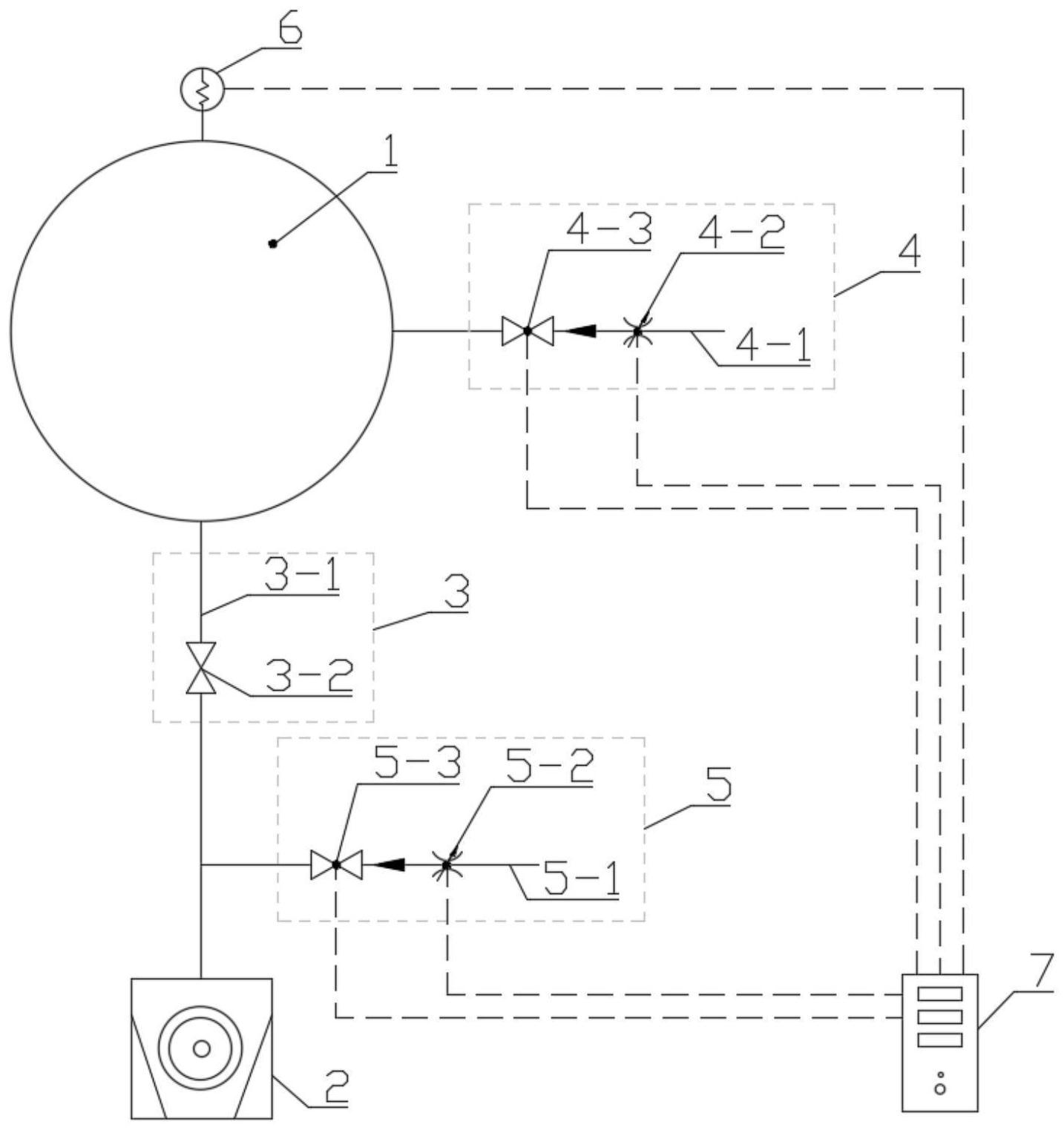
针对现有技术中存在的缺陷,本发明的目的是为了解决对1Pa~5000Pa量级低真 空系统抽气的同时在系统持续充入工作气体时,对系统的动态压力进行精确控制的问题。 系统的动态压力(真空度)取决于系统工作气体流量(充气量)和真空泵对系统的有效抽速, 对于此类系统而言,工作气体充气量是需要进行调节的变量,真空泵对系统的有效抽速取 决于泵自身在不同压力区间的名义抽速和真空抽气管路系统的几何结构尺寸(包括阀门开 度),对于系统内的动态压力值,泵的名义抽速是非线性的变量,因此为满足设定的动态压 力目标值,根据不同的工作气体充气量,真空泵对系统的有效抽速需根据系统动态压力反 馈值进行动态调节,现有技术一般通过对阀门开度或真空泵组变频进行调节,从而调节系 统有效抽速,阀门开度及真空泵组变频与有效抽速之间也为非线性关系,且阀门开度调节 动作非常频繁,过多的非线性变量和阀门频繁的调节动作造成系统压力控制精度低,稳定 性差,阀门寿命低。本发明通过采用新的技术途径,不需对真空泵进行抽速调节,不需要对 真空泵泵口阀门开度进行调节,通过在真空泵抽气口充入调节气体的方式,实现真空泵总 抽气负载(为充入的工作气体量和调节气体量之和)的调节,充入调节气体量控制精度高, 动态反应快,可实现对真空泵总抽气负载的调节,从而实现对真空室动态压力(工作真空 度)的精确控制。 4 CN 111594446 A 说 明 书 2/4 页 为达到以上目的,本发明采用了新的技术途径,不需对真空泵进行抽速调节,不需 要对真空泵泵口阀门开度进行调节,而是通过在真空泵抽气口充入调节气体的方式,实现 真空泵抽气负载的调节,从而实现对系统的工作真空度的精确控制。本发明采取的技术方 案是: 一种低真空抽气系统持续充入工作气体时的动态压力精确控制系统,包括:真空 室1、真空泵组2、真空抽气管道阀门组件3、工作气体输入单元4、调节气体输入单元5、压力 测量单元6和电气控制单元7; 所述真空泵组2通过真空抽气管道阀门组件3与真空室1连接,所述真空泵组2用于 通过真空抽气管道阀门组件3对真空室1抽气,所述真空泵组2还与调节气体输入单元5连 接,真空室1与压力测量单元6连接,所述工作气体输入单元4与真空室1连接,所述电气控制 单元7分别与工作气体输入单元4、调节气体输入单元5和压力测量单元6连接。 作为优选方案,所述真空抽气管道阀门组件3包括:真空抽气管道3-1和阀门3-2, 所述真空抽气管道3-1的一端与真空室1连接,另一端与真空泵组2的抽气口连接,所述阀门 3-2设置在真空抽气管道3-1上。 作为优选方案,所述工作气体输入单元4用于将工作气体充入真空室1内,包括:电 磁阀Ⅰ4-3、质量流量控制器Ⅰ4-2和工作气体管路4-1;工作气体管路4-1的一端与工作气体 气源连接,工作气体管路4-1的另一端与真空室1连接,电磁阀Ⅰ4-3、质量流量控制器Ⅰ4-2设 置在工作气体管路4-1上。 作为优选方案,所述调节气体输入单元5用于将调节气体充入真空泵组2的入口部 位,包括:电磁阀Ⅱ5-3、质量流量控制器Ⅱ5-2和调节气体管路5-1,调节气体管路5-1的一 端与大气连接,调节气体管路5-1的另一端与真空泵组2的抽气口连接,电磁阀Ⅱ5-3、质量 流量控制器Ⅱ5-2设置在调节气体管路5-1上。 作为优选方案,所述压力测量单元6根据压力范围采用不同量程的薄膜真空计,用 于对真空室1内的压力进行测量,并将压力值数据反馈给电气控制单元7。 作为优选方案,所述电气控制单元7分别与电磁阀Ⅰ4-3、质量流量控制器Ⅰ4-2、电 磁阀Ⅱ5-3、质量流量控制器Ⅱ5-2连接; 所述电气控制单元7采用PLC控制真空泵组2的启/停,电磁阀Ⅰ4-3、电磁阀Ⅱ5-3的 开/关,采集真空室1内的压力值数据,并根据要求设定工作气体充气流量,设定真空室1的 目标压力值, 所述电气控制单元7用于根据真空室1反馈的动态压力值数据,控制质量流量控制 器Ⅱ5-2对调节气体充气流量进行PID(PID是比例P、积分I、微分D控制算法,是一种闭环控 制算法)自动调整,从而实现对真空室1内动态压力的精确控制。 作为优选方案,所述真空室1为各种结构形状的真空容器,其内部的动态压力为控 制目标,真空室1为动态压力精确控制系统提供满足压力指标要求的工作环境。 作为优选方案,所述真空泵组2采用机械泵或螺杆泵,根据抽速需求,也可采用机 械泵或螺杆泵与罗茨泵组合。 作为优选方案,所述真空泵组2的抽速应保证在工作气体为最大充入量时,真空室 1的压力小于最小压力值1Pa,从而使真空泵组2能够充入一定量的调节气体,实现对抽气负 载进行调节的功能。 5 CN 111594446 A 说 明 书 3/4 页 作为优选方案,所述真空泵组2的极限真空度小于真空室1要求的最低压力一个数 量级,对于最低压力要求为1Pa的系统,真空泵组2的极限真空度应小于0.1Pa。 作为优选方案,为避免大气对真空室1内的工作气体组成比例造成影响,调节气体 输入单元5的充气口位于真空泵组2的抽气口附近,并保证真空抽气管道3-1具有一定的长 度。 有益效果:本发明提供的低真空抽气系统持续充入工作气体时的动态压力精确控 制系统与现有技术相比具有以下优点: 系统的动态压力(真空度)取决于系统工作气体流量(充气量)和真空泵对系统的 有效抽速,对于低真空抽气系统持续充入工作气体时的动态压力精确控制系统,现有技术 一般通过对阀门开度或真空泵组变频进行调节,从而调节系统有效抽速,阀门开度及真空 泵组变频与有效抽速之间为非线性关系,且阀门开度调节动作非常频繁,过多的非线性变 量和阀门频繁的调节动作造成系统压力控制精度低,稳定性差,阀门使用寿命低。采用本发 明所述的系统不需对真空泵进行抽速调节,不需要对真空泵泵口阀门开度进行调节,而是 通过在真空泵抽气口充入调节气体的方式,实现真空泵总抽气负载(为充入的工作气体量 和调节气体量之和)的调节,充入调节气体量控制精度高,动态反应快,可实现对真空泵总 抽气负载的调节,从而实现对真空室动态压力(工作真空度)的精确控制。 附图说明 本发明有如下附图: 图1本发明低真空抽气系统持续充入工作气体时的动态压力精确控制系统原理 图。 图中:1-真空室;2-真空泵组;3-真空抽气管道阀门组件;3-1-真空抽气管道;3-2- 阀门;4-工作气体输入单元;4-1工作气体管路;4-2-质量流量控制器Ⅰ;4-3-电磁阀Ⅰ;5-调 节气体输入单元;5-1-调节气体管路;5-2-质量流量控制器Ⅱ;5-3-电磁阀Ⅱ;6-压力测量 单元;7-电气控制单元。











