
技术摘要:
本发明涉及一种基于外部测量信息修正的自主休眠唤醒生存控制方法,在深空撞击器尾部设置感光装置和测温装置,感光装置采集光信号,以判断白天还是黑夜。测温装置测量环境温度,以防感光装置感光面被意外遮挡导致判断有误,确保判断的有效性。定期(1‑2小时)采集感光信 全部
背景技术:
随着空间技术的发展与进步,深空探测的手段由最初的飞越探测发展到环绕、着 陆、巡视、采样等多方式组合探测,实现环绕到着陆、表面到内部的跨越,正在向立体探测、 内部深度探测方向发展。撞击探测是实现内部探测的高效手段,具有结构简单可靠、集成度 高、配置灵活的特点,消耗较少资源即可侵彻到天体内部。 综合考虑撞击深度、太阳光照变化周期、载荷功耗和环境温度等因素,实现休眠唤 醒功能,解决驻留周期内设备长时间生存、热控能源导入以及可靠性安全性问题。考虑在进 入休眠期前,热控系统切换为“休眠保温”模式;驻留模块进行自主规划,计算下次唤醒时太 阳光照位置与时间预测;休眠期间所有载荷均处于断电状态;自主唤醒后,设备加电,进行 状态自检,确认具备工作条件后,建立与环绕器的通信链路,各模块依次转入工作模式,开 始新的科学探测周期。 常规自主管理的休眠唤醒策略是依靠器上时钟计时或者外部指令,撞击探测遇到 的问题是小行星自转特性事先未知,基于时间的休眠唤醒策略不可靠,需要有外部事件触 发,但是撞击时全自主运行,没有外部指令,只能依靠自身敏感外部信息。因此提出了一种 利用撞击后器上的感光元件和温度传感器信息,来确定白天和黑夜的时间点,并依此来执 行不同的管理策略。
技术实现要素:
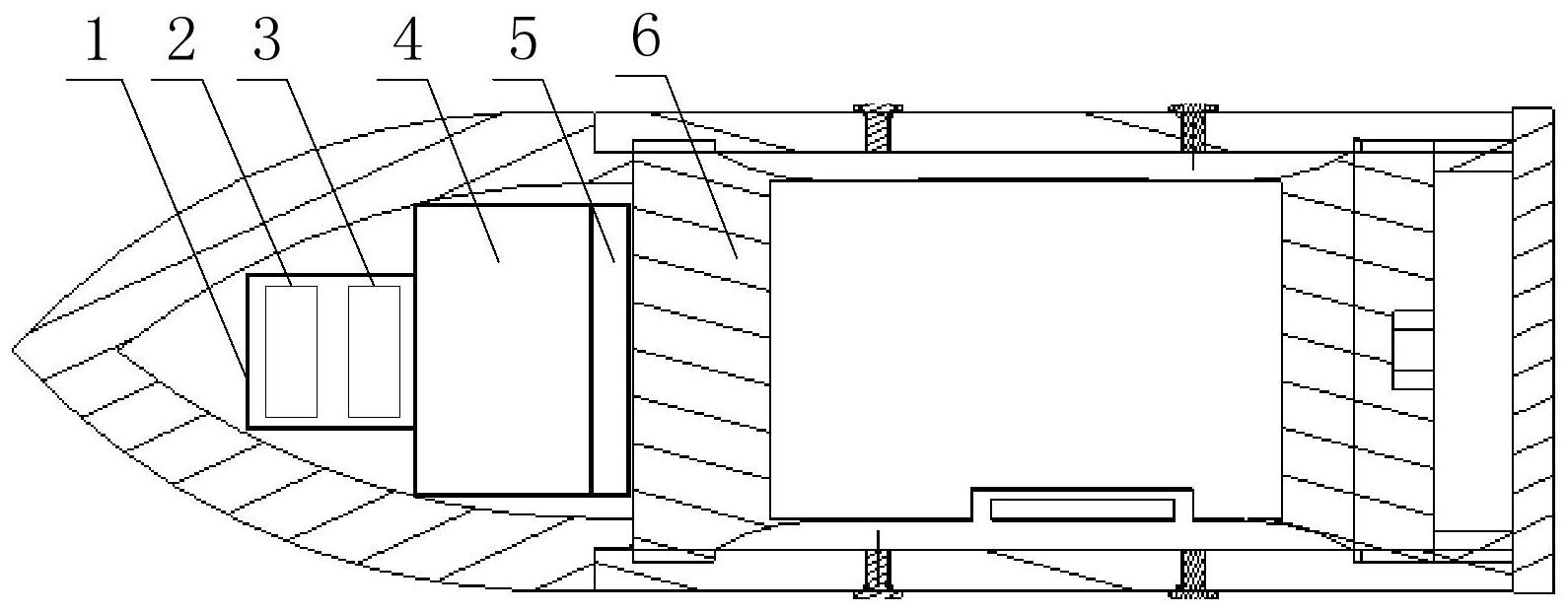
本发明的技术解决问题是:克服现有技术的不足,提供了一种基于外部测量信息 修正的自主休眠唤醒生存控制方法,深空撞击器通过定期采集感光信息和温度信息,通过 连续测量综合判断当前白天和黑夜的时间点,完成信息修正,由此执行休眠唤醒等不同的 控制策略。 本发明的技术解决方案是: 一种基于外部测量信息修正的自主休眠唤醒生存控制方法,步骤如下: (1)在深空撞击器尾部设置感光装置和测温装置,感光装置采集光信号,测温装置 测量环境温度; (2)深空撞击器撞击星体后,感光装置采集外界感光信息,感光装置采集的同时测 温装置采集外界温度信息,并将采集到的信息提供给深空撞击器的控制模块; (3)控制模块对感光装置采集的离散的感光信息进行拟合,去掉超差大的极值,得 到均值感光信息;若均值感光信息显示有光,则设置感光标志位L_DATA,并置为1;若均值感 光信息显示无光,则设置感光标志位L_DATA为0; (4)控制模块对测温装置采集的外界温度信息进行拟合,去掉超差大的极值,得到 4 CN 111591465 A 说 明 书 2/6 页 测温均值;若测温均值高于设置的阈值,则设置测温标志位T_DATA为1;否则设置测温标志 位T_DATA为0; (5)根据测温标志位T_DATA和感光标志位L_DATA进行深空撞击器所处时刻判断; (6)若深空撞击器所处时刻为白天,则控制模块控制深空撞击器自主唤醒,若深空 撞击器所处时刻为黑夜,则控制模块控制深空撞击器继续休眠。 进一步的,令感光装置每隔一小时采集外界感光信息,连续采集30s,测温装置采 集外界温度信息,连续采集30s。 进一步的,深空撞击器所处时刻判断,具体为: (5.1)若L_DATA=1且T_DATA=1,则表示深空撞击器所处时刻为白天; (5.2)若L_DATA=0且T_DATA=0,则表示深空撞击器所处时刻为黑夜; (5.3)若L_DATA=0且T_DATA=1,则表示深空撞击器所处时刻为白天; (5.4)若L_DATA=1且T_DATA=0,继续连续采集温度信息50s,若T_DATA=1,则表 示深空撞击器所处时刻为白天;若T_DATA=0,则表示数据无效。 进一步的,控制模块的工作温度通过在深空撞击器头部内腔设置的温度控制结构 实现,该温度控制结构包括:产能单元外罩、第一产能单元组份、第二产能单元组份、相变储 能材料以及导热带; 相变储能材料位于产能单元外罩和导热带之间,三者平行紧贴串联安装,相变储 能材料和深空撞击器的控制模块之间通过导热带紧密贴合;所述产能第一产能单元组份和 第二产能单元组份设置在产能单元外罩内部; 所述产能单元外罩、第一产能单元组份以及第二产能单元组份共同做成深空撞击 器的产能单元;所述产能单元、相变储能材料以及导热带均位于深空撞击器的头部壳体内。 进一步的,深空撞击器撞击前,产能单元壳体内的第一产能单元组份和第二产能 单元组份处于分离状态;撞击时产生过载加速度,第一产能单元组份和第二产能单元组份 融合产生热能,存储在相变储能材料中,撞击后相变储能材料逐步释放能量,为深空撞击器 的控制模块保温,支撑深空撞击器生存。 进一步的,深空撞击器撞击时第一产能单元组份和第二产能单元组份混合,将化 学能转化为热能;第一产能单元组份为锡,产能单元组份二为过氧化氢。 进一步的,第一产能单元组份和第二产能单元组份呈立方体形结构,边长在40mm 到42mm之间。 进一步的,处于分离状态时,第一产能单元组份和第二产能单元组份之间的间距 为4mm~7mm。 进一步的,相变储能材料选取相变温度在-10℃-45℃的介质材料,当温度高于45 ℃后吸收储能,当温度低于-10℃后释放热能,实现自主温控。 进一步的,相变储能材料采用石蜡和石墨混合制成,其质量百分比为:石蜡:石墨 =93:7。 与现有技术相比,本发明具有如下的有益效果: (1)本发明涉及感光装置和测温装置,感光装置采集光信号,以判断白天还是黑 夜。测温装置测量环境温度,以防感光装置感光面被意外遮挡导致判断有误,确保判断的有 效性。感光信息和温度信息传至高加固模块进行综合修正判断,以实现自主休眠唤醒。 5 CN 111591465 A 说 明 书 3/6 页 (2)感光装置采集的感光信息和测温装置采集的温度信息,均传输至高加固控制 模块,进行测量信息修正后,自主综合判断当前时间点,以此为输入条件进行休眠唤醒控 制;该方法全过程自主判断,以温度信息辅助修正感光信息,有效实现休眠唤醒控制。 (3)与现有技术相比,本发明提供的基于外部测量信息修正的自主休眠唤醒生存 控制方法,简单可靠,能耗小,冗余度高,可以有效实现深空撞击器自主休眠唤醒,具有极高 的工程应用价值。 (4)本发明将产能单元和相变储能材料放置在深空撞击器内部,撞击前产能单元 不同组份分离,撞击时产生过载加速度,产能单元不同组份融合产生热能,存储在相变储能 材料中,撞击后逐步释放能量,为深空撞击器保温,支撑深空撞击器生存。 (5)本发明产能单元两种组份通过撞击时的大冲击过载实现接触产能;相变储能 材料存储产能单元释放的能量,通过导热带和深空撞击器关键电子学部分——高加固控制 模块进行热交互,有效保证高加固控制模块的温度需求。 (6)本发明相变储能材料选择相变温度在-10℃-45℃的介质材料,当温度高于45 ℃后吸收储能,当温度低于-10℃后释放热能,有效实现自主温控。 附图说明 图1为本发明的结构示意图; 图2为本发明感光装置和测温装置装配图; 图3为本发明工作状态示意图; 图4为本发明信息流程图; 图5为本发明判断逻辑框图。











