
技术摘要:
在基于自动驾驶而在十字路口右转时,判定在此次绿灯的期间本车辆能否右转。而且,在能够右转的情况下,利用第1驱动力使本车辆接近十字路口而执行右转,在无法右转的情况下,利用低于第1驱动力的第2驱动力使本车辆前进至下一次绿灯时的起步位置。
背景技术:
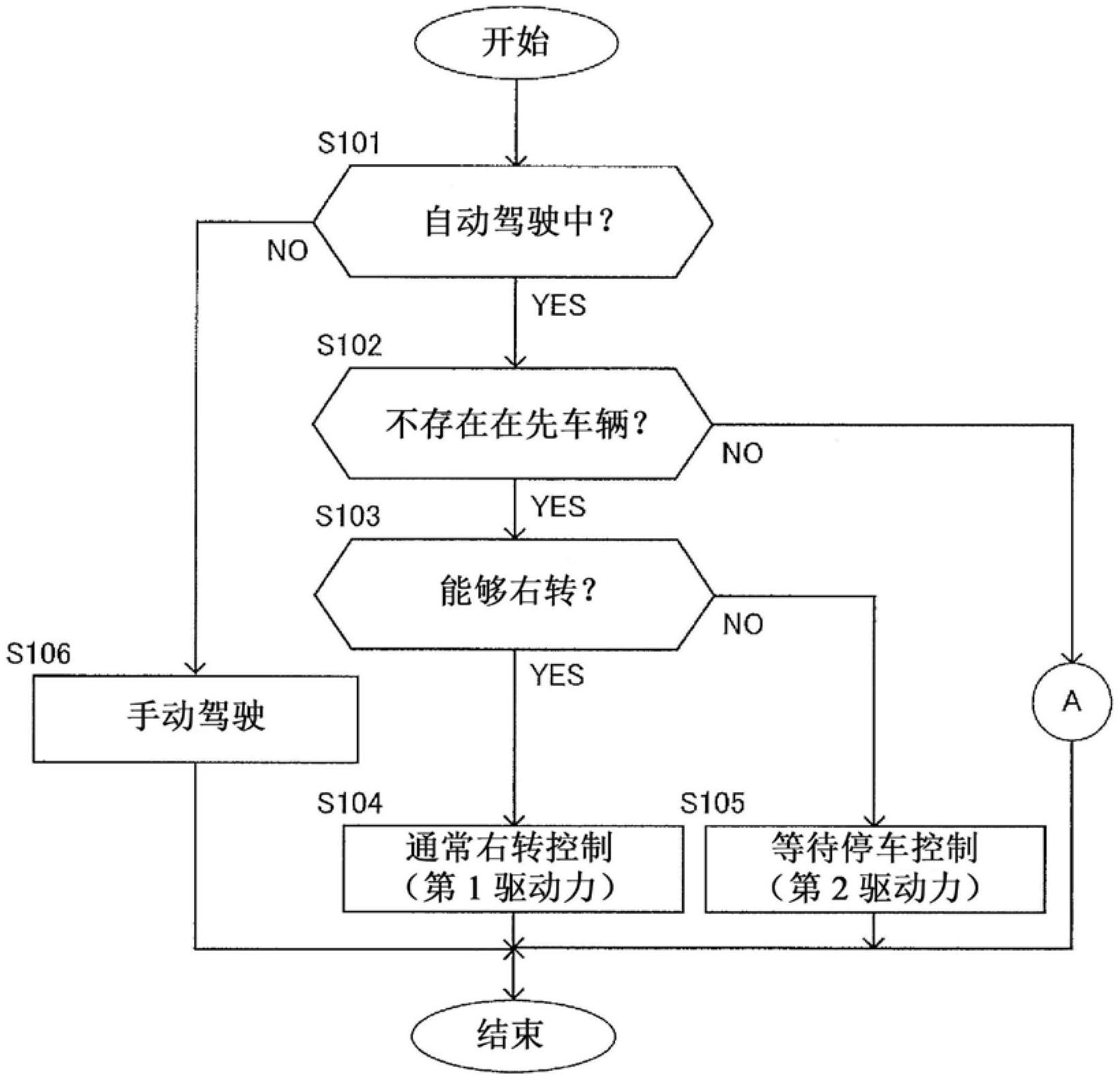
作为不以十字路口的存在为前提而能够应用于通过自动驾驶从信号灯通过时的 技术,JP2007-219743A中公开了如下技术。在接近本车辆前方的信号灯的过程中,基于车载 照相机的图像信息等而识别该信号灯的点亮颜色。而且,如果信号灯为绿灯,则维持基于自 动驾驶的当前的行驶状态而从信号灯通过、或者追随本车辆前方的在先车辆而从信号灯通 过(第0033、0034段)。
技术实现要素:
然而,当在十字路口右转时,根据上述文献记载的技术,在仅将信号灯为绿灯作为 条件而维持当前的行驶状态或者追随在先车辆的情况下,存在如下问题。当信号灯的点亮 颜色在进入十字路口之前从表示许可进入的颜色(例如绿色)切换为表示注意进入或禁止 进入的颜色(例如黄色或红色)的情况下,为了避免进入十字路口而不得不减速,有时直至 识别出点亮颜色的切换为止的行驶所需的燃料的消耗产生浪费。 本发明的目的在于提供考虑了以上问题的自动驾驶车辆的控制方法以及控制装 置。 在一个方式中,提供一种自动驾驶车辆的控制方法,在基于自动驾驶而在十字路 口右转时,判定本车辆在此次绿灯的期间能否右转,在能够右转的情况下,利用第1驱动力 使本车辆接近十字路口而执行右转,在无法右转的情况下,利用低于第1驱动力的第2驱动 力使本车辆前进至下一次绿灯时的起步位置。 在其他方式中,提供一种自动驾驶车辆的控制装置。 附图说明 图1是表示本发明的一个实施方式所涉及的自动驾驶车辆的控制系统的整体结构 的概略图。 图2是表示同上实施方式所涉及的基于右转控制的自动驾驶车辆的动作的一个例 子(控制开始时)的说明图。 图3是表示同上实施方式所涉及的控制系统执行的右转控制流程的、先头车辆右 转时的处理内容的流程图。 图4是表示同上实施方式所涉及的右转控制流程的、第2辆车辆右转时的处理内容 的流程图。 图5是表示同上实施方式所涉及的右转控制流程的、第3辆以后的车辆右转时的处 理内容的流程图。 3 CN 111615478 A 说 明 书 2/9 页 图6是表示同上实施方式所涉及的自动驾驶车辆的动作的一个例子(到达停止线 时)的说明图。 图7是表示同上实施方式所涉及的自动驾驶车辆的动作的一个例子(通过十字路 口时)的说明图。











