
技术摘要:
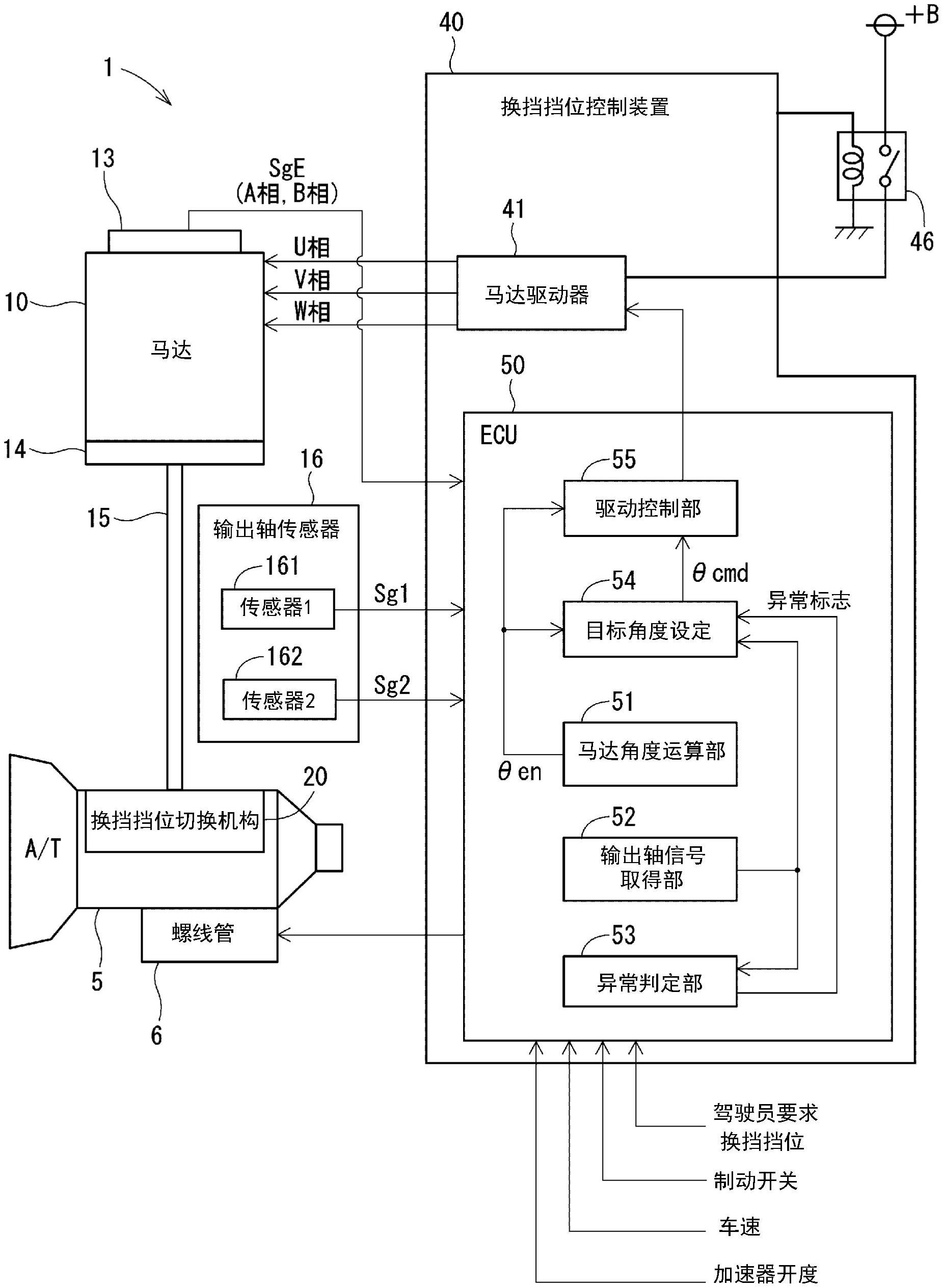
马达角度运算部(51)从检测马达(10)的旋转的马达旋转角传感器(13)取得与马达(10)的旋转位置对应的马达旋转角信号,基于马达旋转角信号运算马达角度。输出轴信号取得部(52)从检测被传递马达(10)的旋转的输出轴(15)的旋转位置的输出轴传感器(16)取得与输出轴(15)的旋转位 全部
背景技术:
以往,已知有通过对马达的驱动进行控制来切换换挡挡位的换挡挡位切换机构。 例如在专利文献1中,基于编码器及输出轴传感器的检测值对马达的驱动进行控制。 现有技术文献 专利文献 专利文献1:日本特许第4385768号
技术实现要素:
在专利文献1中,如果输出轴传感器故障,则无法适当地设定目标马达旋转角。本 发明的目的在于,提供在输出轴传感器发生了异常的情况下也能够适当地切换换挡挡位的 换挡挡位控制装置。 本发明的换挡挡位控制装置,对通过对马达的驱动进行控制来切换车辆的换挡挡 位的换挡挡位切换系统进行控制,具备马达角度运算部、输出轴信号取得部、异常判定部、 目标角度设定部和驱动控制部。 马达角度运算部从检测马达的旋转的马达旋转角传感器取得与马达的旋转位置 对应的马达旋转角信号,基于马达旋转角信号运算马达角度。输出轴信号取得部从检测被 传递马达的旋转的输出轴的旋转位置的输出轴传感器,取得与输出轴的旋转位置对应的输 出轴信号。异常判定部判定输出轴传感器的异常。目标角度设定部设定与目标换挡挡位对 应的目标旋转角度。驱动控制部对马达的驱动进行控制,以使马达角度成为目标旋转角度。 目标角度设定部在输出轴传感器正常的情况和输出轴传感器异常的情况下,将目标旋转角 度设定为不同的值。由此,在输出轴传感器发生了异常的情况下也能够适当地切换换挡挡 位。 关于本发明的上述目的及其他目的、特征及优点一边参照附图一边通过下述的详 细的记述会变得更明确。 附图说明 图1是表示一实施方式的线控换挡系统的立体图。 图2是表示一实施方式的线控换挡系统的概略结构图。 图3是说明一实施方式的止动板及止动辊、以及与止动辊的位置对应的负荷转矩 4 CN 111601990 A 说 明 书 2/9 页 及输出轴信号的说明图。 图4是说明一实施方式的异常判定处理的流程图。 图5是说明一实施方式的目标角度设定处理的流程图。 图6是说明一实施方式的马达控制处理的时间图。











