
技术摘要:
本发明公开一种自动驾驶场景分类识别系统及方法,所述系统设置场景数据获取模块、驾驶场景识别模块、场景融合模块、场景片段切分与存储模块;场景数据获取模块获取场景关键信息;驾驶场景识别模块根据场景关键信息对各类驾驶场景进行并行识别;场景融合模块对识别的驾 全部
背景技术:
自动驾驶汽车是一种通过自动控制系统实现的无人驾驶智能汽车。近年来汽车智 能化技术发展迅速,辅助驾驶技术与部分自动驾驶技术已进入到产业化阶段;有条件的自 动驾驶与高度自动化驾驶技术进入测试验证阶段。驾驶场景识别技术是智能驾驶辅助系统 与无人驾驶车辆进行环境感知的关键基础技术,对驾驶场景的准确识别有利于自动驾驶汽 车安全稳定地驾驶。而对驾驶场景的识别有赖于前期对驾驶场景的分类,现有技术中对驾 驶场景的分类技术主要是基于众多的驾驶场景数据对场景进行分类,前期虽然采集了很多 驾驶场景数据,并采用较为固定的分类规则对驾驶场景数据进行分类,但是由于驾驶场景 的复杂性,并且随着社会环境的不断发展变化,采集的驾驶场景数据有时很难匹配到固定 的分类规则中,这导致分类系统杂乱无序,不利于后续统计分析和对自动驾驶技术的优化。
技术实现要素:
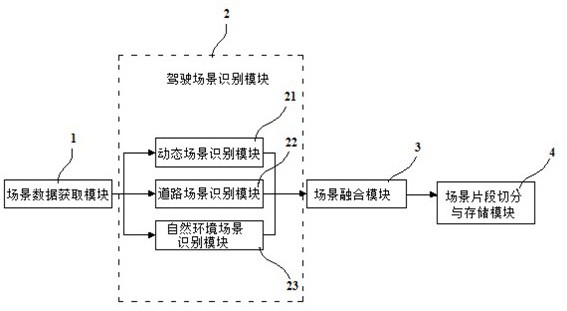
因此,本发明意在提供一种自动驾驶场景分类识别系统及方法,能够对车辆行驶 过程中的交通场景进行多维度评估、分类和识别,为自动驾驶场景研究、自动驾驶系统开 发、自动驾驶系统测试、自动驾驶系统评价奠定数据基础。 本发明所采取的技术方案如下:一种自动驾驶场景分类识别系统,包括场景数据 获取模块、驾驶场景识别模块、场景融合模块、场景片段切分与存储模块; 所述场景数据获取模块,获取场景关键信息,发送给所述驾驶场景识别模块; 所述驾驶场景识别模块,根据所述场景关键信息,对自定义的各类驾驶场景进行并行 识别; 所述场景融合模块,对并行识别出的驾驶场景进行场景融合,得出多维度驾驶场景; 所述场景片段切分与存储模块,根据多维度驾驶场景对所述场景关键信息进行切分和 存储。 进一步地,所述场景关键信息,包含数据采集时间、采样步长、动态场景信息、道路 场景信息和自然环境场景信息。 进一步地,所述自定义的各类驾驶场景,包含主场景和基于主场景下的子场景,所 述主场景至少有一类,基于同一主场景下的子场景也至少有一类。 进一步地,各所述子场景具有可设置的场景等级。 进一步地,各所述子场景具有可配置的可切分属性,所述可切分属性表述为对立 的两种。 进一步地,所述驾驶场景识别模块,根据各所述主场景设置相应的分类场景识别 模块,各相应的分类场景识别模块对从属于同一主场景下的各子场景进行并行识别。 4 CN 111599183 A 说 明 书 2/7 页 进一步地,各相应的分类场景识别模块,根据所述场景关键信息,以及预设的各子 场景的参数边界与提取标准,对从属于同一主场景下的各子场景进行并行识别。 本发明还提供一种自动驾驶场景分类识别方法,包括如下步骤: 步骤1)自定义驾驶场景类型,包括主场景类型和基于主场景下的子场景类型; 步骤2)获取场景关键信息,包含数据采集时间、采样步长、动态场景信息、道路场景信 息和自然环境场景信息; 步骤3)预设各子场景的参数边界与提取标准,根据所述场景关键信息对各子场景进行 并行识别,识别出基于所述场景关键信息的子场景; 步骤4)基于设定的场景融合约束条件和融合原则,对识别出的各子场景进行场景融 合,得出多维度驾驶场景, 场景融合约束条件: 条件A)自定义设置各子场景的优先等级,高等级的子场景优先于低等级的子场景被识 别保留; 条件B)自定义配置子场景的可切分属性,分为“是”或者“否”两种; 融合原则: (4-2-1)如果某一子场景的可切分属性是“是”,且该子场景的时间区间内同时存在其 他主场景下的两种以上子场景,且该时间区间可被其他两种以上子场景切分为对应的子时 间区间,则该子场景可按子时间区间被切分,切分之后,不论场景等级如何,所有切分片段 都被识别; (4-2-2)如果某一子场景的可切分属性是“否”,且该子场景的时间区间内同时存在其 他主场景下的两种以上子场景,且该时间区间可被其他两种以上子场景切分为对应的子时 间区间,则: 当该子场景的等级高于其他子场景时,该子场景不能按子时间区间被切分,以完整的 时间区间片段被识别; 当该子场景的等级低于其他子场景时,该子场景可按子时间区间被切分,所有切分片 段都被识别; 当该子场景的等级等于其他子场景时,该子场景可按子时间区间被切分,所有切分片 段都被识别; 步骤5)根据场景融合信息,进行原始场景关键信息的切分与存储。 进一步地,自定义驾驶场景类型,是从主场景向子场景逐级定义的,所述主场景至 少有一类,基于同一主场景下的子场景也至少有一类。 本发明通过将多维度驾驶场景按从主场景到子场景逐级拆解的方法,将多维度驾 驶场景拆解为多种单一的子场景,由不同的专门模块按场景类型对各子场景进行并行识 别,使得采集的场景关键信息能够充分归纳到各种类型的场景中去,可能地并行识别出多 种场景,而并非是一种数据只能识别为一种场景,这使得场景识别更全面。其次,本发明再 采用多场景融合的方法,将初次识别的各子场景再进行融合判断,去除冗余场景,最终获得 与采集的场景关键信息直接相关的多维度场景,从而还原驾驶场景本身,方便提取使用。通 过本发明所述的系统和方法,可以实现对驾驶场景的多维度评估,实现对驾驶场景的智能 分类识别。 5 CN 111599183 A 说 明 书 3/7 页 本发明的其他特征和优点将在随后的说明书中阐述,并且部分的从说明书中变得 显而易见,或者通过实施本发明而了解。 附图说明 图1为本发明一种自动驾驶场景分类识别系统的结构图; 图2为对某段驾驶过程的驾驶场景的分类识别方法实施例示意图。











