
技术摘要:
本方案涉及一种新能源汽车的车速限速控制方法、装置及新能源汽车,以提高对车辆的车速限制控制精度。该方法包括:从多个限制车速来源处收集的多个限制车速;从所收集的多个限制车速中选取数值最小的其中一个限制车速作为目标限制车速Vlim;基于车辆的实际车速Vact与目 全部
背景技术:
在整车功能的开发中,有很多对车速限制的需求来源,如最高车速的车速限制、EV 模式的车速限制(针对有EV模式且有限速需求的车型)、故障诊断请求的车速限制、来自ASL (Adjustable Speed Limiter:可调限速器)功能的车速限制要求等。为了满足限速要求,需 要开发车速限制的控制方法。车速限制控制主要分两大类情况,一是车辆实际车速小于限 制车速的情况,则车速限制控制主要是确保驾驶员驱动需求小的情况,车辆按照驾驶员驱 动需求进行行驶,当驾驶员驱动需求大,则车速限制控制确保无论驾驶员驱动需求多大都 不会导致车辆超过限制车速;二是车辆实际车速大于限制车速的情况,则车速限制控制确 保车辆减速至限制车速,同时保证无论驾驶员驱动需求多大都不会导致车辆超过限制车 速,但如果驾驶员驱动需求控制的车速比限制车速小,则车辆按照驾驶员驱动需求进行行 驶。 公告号为CN106004856B的专利中,公开了一种车速限制方法,其首先对限制车速 与实际车速进行差值计算,用以计算限制加速度的值,差值越大,限制加速度越大,然后根 据限制加速度计算出限制驱动力FFF,然后根据专利中的第一计算方法计算限制驱动力FFB, 即根据限制加速度与实际加速度的偏差乘以预定的增益,然后再与上一时刻的加速度累 加,累加后的加速度再乘以整车质量得到FFB,然后上限驱动力FLIMT,然后再将FLIMT与驾驶员 要求驱动力进行取小作为最终的驱动力;当最终的驱动力为FLIMT,则限制标志设置为1,当 最终的驱动力为驾驶员要求驱动力,则限制标志设置为0。当限制标志设置为1时,下一周期 选择专利中的第一计算方法得出FFB,当限制标志设置为0时,下一周期选择专利中的第二计 算方法得出FFB。对于第二计算方法得出FFB的公式为:FFB=(当前产生的驱动力)-{(车辆重 量)*(实际加速度) (行驶阻力)}。 对于该专利中的方案存在几个问题点,第一,该专利中的车辆重量是一个定值,但 车辆实际使用过程中的重量随着驾乘人员的重量和数量的不同以及加装的货物不同,其质 量是在变化的,因此以一个固定的质量进行力的计算是不准确的;第二,专利中的行驶阻力 也是拟合的阻力曲线,真实的运行环境由于风速和路面的粗糙度不一样,而与拟合的阻力 曲线不一致;第三,整个专利中计算量大,在整个限速过程中一直在计算,计算量很大。
技术实现要素:
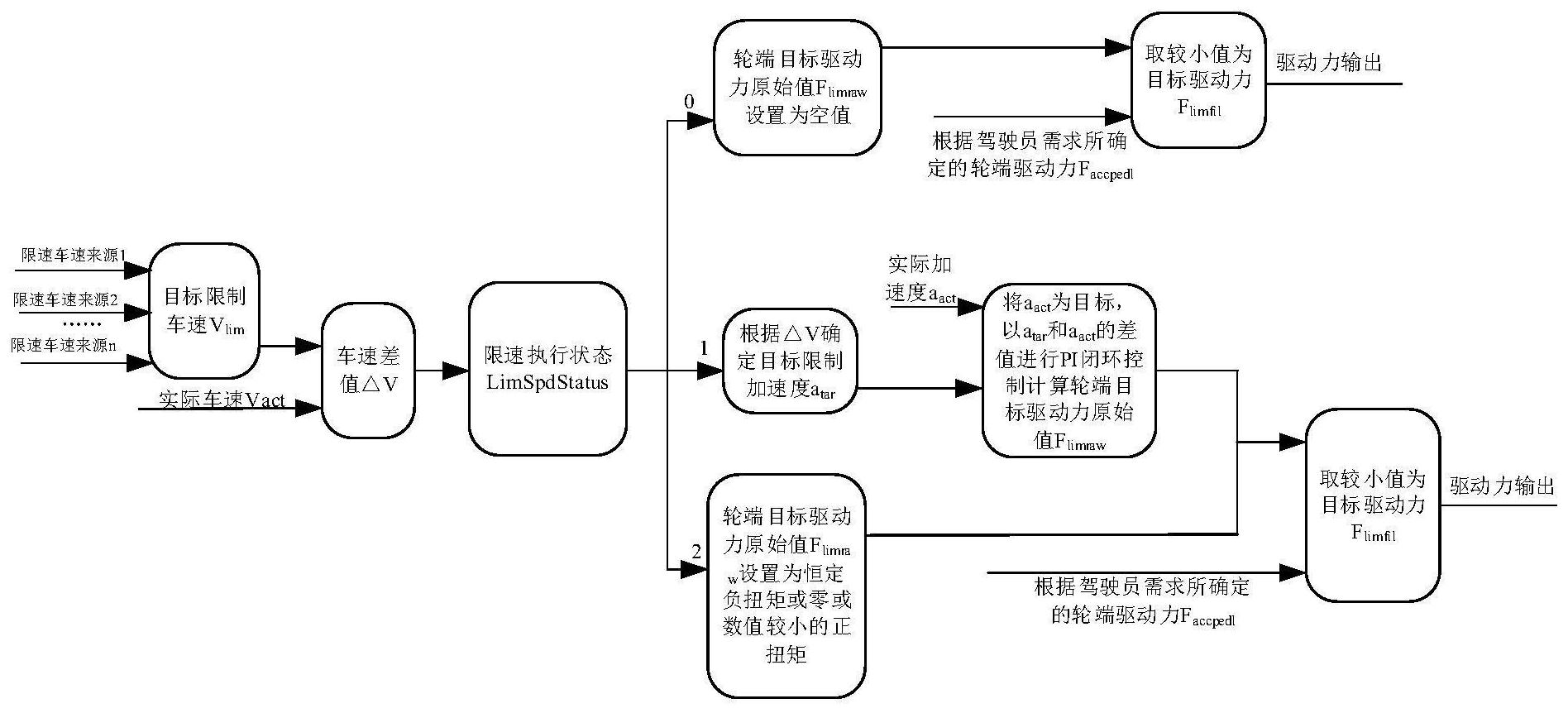
本发明的目的在于提供一种新能源汽车的车速限速控制方法、装置及新能源汽 车,以提高对车辆的车速限制控制精度。 本发明的技术方案为: 本发明实施例提供了一种新能源汽车的车速限速控制方法,包括: 4 CN 111731298 A 说 明 书 2/7 页 从多个限制车速来源处收集的多个限制车速; 从所收集的多个限制车速中选取数值最小的其中一个限制车速作为目标限制车速 Vlim; 基于车辆的实际车速Vact与目标限制车速Vlim的车速差值 ∆ V来确定限速执行状态 LimSpdStatus的数值; 根据限速执行状态LimSpdStatus的数值,确定对应的轮端目标驱动力原始值Flimraw; 根据所述轮端目标驱动力原始值Flimraw和根据驾驶员需求所确定的轮端驱动力Faccpedl 确定目标驱动力Flimfil; 控制车辆的驱动力产生装置产生与所述目标驱动力Flimfil相同大小的驱动力并进行输 出。 优选地,多个限制车速来源至少包括: 车辆的最高限制车速; 针对有EV模式且具有限速需求的车辆,当在EV模式运行时的最高限制车速; 车辆故障时,基于故障诊断所输出的最高限制车速; 针对配置有可调限速器的车辆,由可调限速器输出的最高限制车速。 优选地,基于车辆的实际车速Vact与目标限制车速Vlim的车速差值 ∆ V来判定限速 执行状态LimSpdStatus的步骤包括: 在车速差值 ∆ V满足 ∆ V<-A时,确定限速执行状态LimSpdStatus的数值为0; 若不满足 ∆ V<-A,则在车速差值 ∆ V满足-A ≤ ∆ V<A时,确定限速执行状态 LimSpdStatus的数值为1; 若不满足-A ≤ ∆ V<A,则确定限速执行状态LimSpdStatus的数值为2; 在确定限速执行状态LimSpdStatus的数值为1后,车速差值 ∆ V随车辆的实际车速Vact 变化而变化,若变化后的车速差值 ∆ V满足 ∆ V<-B,则确定限速执行状态LimSpdStatus的 数值变化为0;若变化后的车速差值 ∆ V不满足 ∆ V<-B和-B≤ ∆ V<B,则确定限速执行状态 LimSpdStatus的数值变化为2;若变化后的车速差值 ∆ V不满足 ∆ V<-B但满足-B≤ ∆ V<B, 则确定限速执行状态LimSpdStatus的数值仍保持为1; 在确定限速执行状态LimSpdStatus的数值为2后,车速差值 ∆ V随车辆的实际车速Vact 变化而变化,若变化后的车速差值 ∆ V满足 ∆ V<-B,则确定限速执行状态LimSpdStatus的 数值变化为0;若变化后的车速差值 ∆ V不满足 ∆ V<-B但满足-B≤ ∆ V<A,则确定限速执行 状态LimSpdStatus的数值变化为0;若变化后的车速差值 ∆ V不满足 ∆ V<-B 和-B≤ ∆ V< A,则确定限速执行状态LimSpdStatus的数值仍保持为2; 其中,A和B为标定数值,A和B为正值,A的数值小于B的数值。 优选地,根据限速执行状态LimSpdStatus的数值,确定对应的轮端目标驱动力原 始值Flimraw的步骤包括: 在限速执行状态LimSpdStatus的数值为0时,确定轮端目标驱动力原始值Flimraw的值为 空值; 在限速执行状态LimSpdStatus的数值为1时,根据预存的车辆的实际车速Vact与目标限 制加速度atar的对应关系表,查找与车辆的实际车速Vact对应的目标限制加速度atar;并根据 车辆的实际车速Vact计算车辆的实际加速度aact;然后以目标限制加速度atar为目标,以实际 5 CN 111731298 A 说 明 书 3/7 页 加速度aact与目标限制加速度atar的差值进行PI闭环控制计算得出轮端目标驱动力原始值 Flimraw,PI闭环控制计算期望的结果是车辆按照目标限制加速度atar行驶; 在限速执行状态LimSpdStatus的数值为2时,确定轮端目标驱动力原始值Flimraw的值为 一确定的负扭矩值或零; 其中,当车辆的实际车速Vact大于目标限制车速Vlim时,目标限制加速度atar为负值; 当车辆的实际车速Vact小于目标限制车速Vlim时,目标限制加速度atar为正值; 当车辆的实际车速Vact等于目标限制车速Vlim时,目标限制加速度atar为0。 优选地,根据所述轮端目标驱动力原始值Flimraw和根据驾驶员需求所确定的轮端 驱动力Faccpedl确定目标驱动力Flimfil的步骤: 在限速执行状态LimSpdStatus的数值为0时,将根据驾驶员需求所确定的轮端驱动力 Faccpedl确定为所述目标驱动力Flimfil; 在限速执行状态LimSpdStatus的数值为1或2时,将轮端目标驱动力原始值Flimraw和根 据驾驶员需求所确定的轮端驱动力Faccpedl中数值较小的其中一个值确定为所述目标驱动 力Flimfil。 本发明实施例还提供了一种新能源汽车的车速限制装置,包括: 收集模块,用于从多个限制车速来源处收集的多个限制车速; 选取模块,用于从所收集的多个限制车速中选取数值最小的其中一个限制车速作为目 标限制车速Vlim; 第一确定模块,用于基于车辆的实际车速Vact与目标限制车速Vlim的车速差值 ∆ V来确 定限速执行状态LimSpdStatus的数值; 第二确定模块,用于根据限速执行状态LimSpdStatus的数值,确定对应的轮端目标驱 动力原始值Flimraw; 第三确定模块,用于根据所述轮端目标驱动力原始值Flimraw和根据驾驶员需求所确定 的轮端驱动力Faccpedl确定目标驱动力Flimfil; 控制模块,用于控制车辆的驱动力产生装置产生与所述目标驱动力Flimfil相同大小的 驱动力并进行输出。 本发明实施例还提供了一种新能源汽车,包括上述的新能源汽车的车速限制装 置。 本发明的有益效果为: 首先,无需引入整车质量及行驶阻力等无法测量的变量作为车速限制的控制输入,这 样确保了其控制的精度;其次,因加速度对车辆的轮端驱动力的变化更敏感,因此如果外界 出现不可预知的额外力(如上坡和下坡引起的重力对轮端力的叠加),以加速度为目标的调 节会响应更快,最后,本发明只在部分情况下需要计算目标驱动力轮端目标驱动力原始值 Flimraw,因此,计算量较小。 附图说明 图1为本发明实施例中的车速限制控制方法的总体方案概图; 图2-1为本发明实施例中的车速限制控制方法的流程示意图1; 图2-2为本发明实施例中的车速限制控制方法的流程示意图2; 6 CN 111731298 A 说 明 书 4/7 页 图3为车速限制目标加速度曲线; 图4-1为本发明实施例中的实际车速高于目标限制车速且轮端驱动力始终大于目标驱 动力轮端目标驱动力原始值的曲线示意图1; 图4-2为本发明实施例中的实际车速高于目标限制车速且轮端驱动力小于目标驱动力 轮端目标驱动力原始值的曲线示意图2; 图5-1为本发明实施例中的实际车速低于目标限制车速且轮端驱动力始终大于目标驱 动力轮端目标驱动力原始值的曲线示意图1; 图5-2为本发明实施例中的实际车速低于目标限制车速且轮端驱动力小于目标驱动力 轮端目标驱动力原始值的曲线示意图2。











