
技术摘要:
本发明公开了一种智能高效型水果刮皮机构装置系统,涉及智能厨卫机构装置领域。本发明中:主升降动力装置的输出轴上设有主升降连杆机构;主升降连杆机构的端侧固定连接有旋转动力装置;旋转动力装置的输出轴上连接有旋转连杆机构;装置本体内固定装设有距离传感监测机 全部
背景技术:
水果刀是小型厨房用刀。一般来看,市场上的水果刀从材质上来说有不锈钢的、塑 料的,从形状上来看有直的、折叠的、甚至还有旋刨式的、环形的等。 在使用水果刀对水果进行水果的刮皮操作时,不仅会增加人们的劳动强度,而且 有时会过多的将水果果肉切除,造成了水果果肉的大量浪费,如何便捷的对水果进行刮皮 操作,同时也减少果肉的浪费,成为需要解决的问题。
技术实现要素:
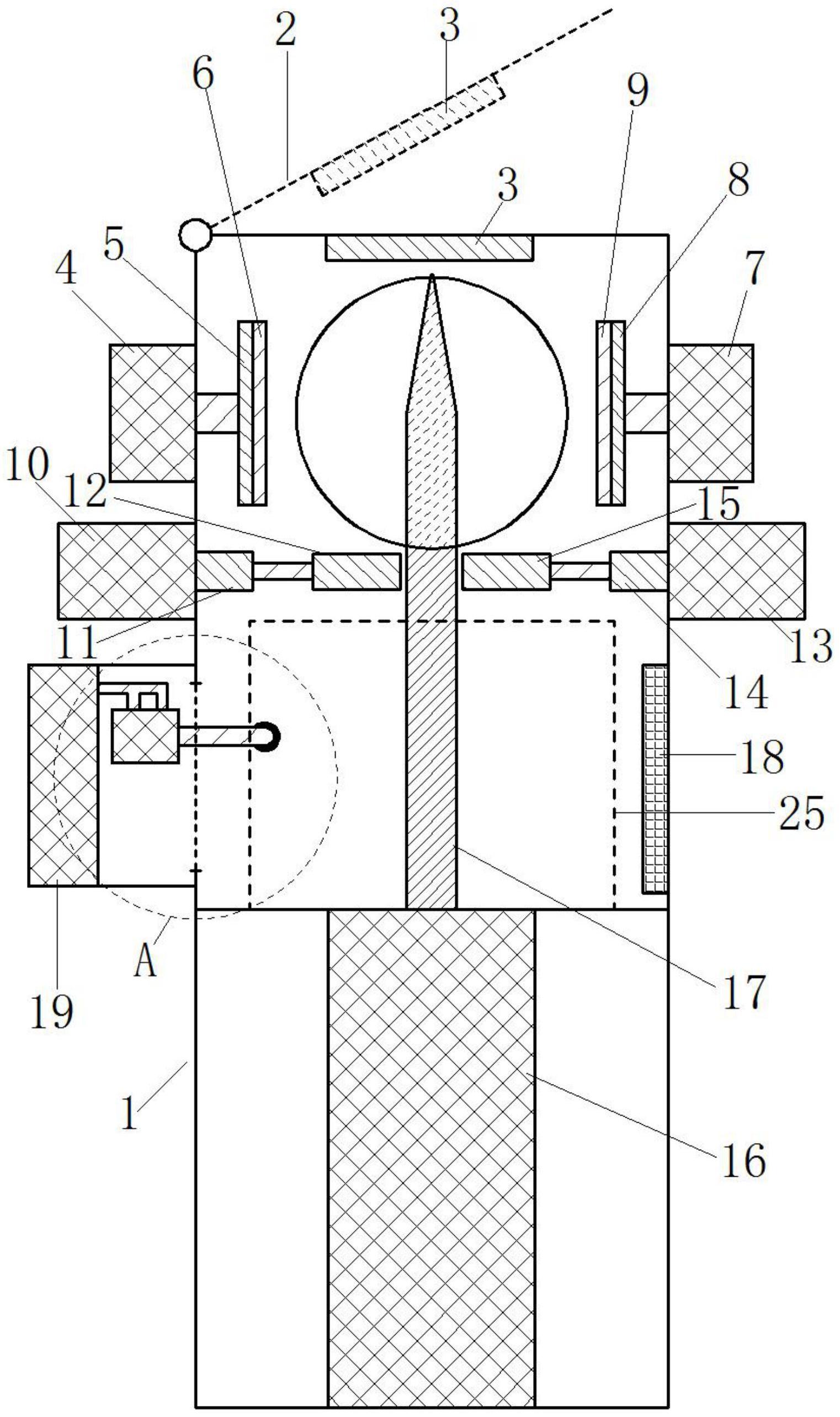
本发明要解决的技术问题是提供一种智能高效型水果刮皮机构装置系统,通过在 装置本体内设置距离传感监测机构,便于对水果的外形尺寸进行监测,通过第一升降调控 动力装置、第五伸缩动力装置对水果进行定位式的刮皮操作,按照水果表面尺寸适应性的 进行水果刮皮操作,提升了水果的刮皮效果,减少了大量果肉的浪费。 为解决上述技术问题,本发明是通过以下技术方案实现的: 本发明提供一种智能高效型水果刮皮机构装置系统,包括装置本体,装置本体上 活动装设有上盖板;装置本体上对称固定装设有第一伸缩动力装置、第二伸缩动力装置;第 一伸缩动力装置的输出轴上垂直固定连接有第一推进连板;第二伸缩动力装置的输出轴上 垂直固定连接有第二推进连板;装置本体上对称固定装设有第三伸缩动力装置、第四伸缩 动力装置;第三伸缩动力装置的输出轴上连接有第三推进连杆机构;第三推进连杆机构的 端侧固定连接有第三支撑连板;第四伸缩动力装置的输出轴上连接有第四推进连杆机构; 第四推进连杆机构的端侧固定连接有第四支撑连板;装置本体内装设有主升降动力装置; 主升降动力装置的输出轴上设有主升降连杆机构;主升降连杆机构的端侧固定连接有旋转 动力装置;旋转动力装置的输出轴上连接有旋转连杆机构;装置本体内固定装设有距离传 感监测机构;装置本体上固定装设有第一升降调控动力装置;第一升降调控动力装置的输 出轴上连接有升降支架连杆;升降支架连杆的一侧固定连接有第五伸缩动力装置;第五伸 缩动力装置的输出轴上设有第五伸缩连杆机构;第五伸缩连杆机构的端侧设有刮皮刀片。 其中,上盖板的内侧固定设有第一内侧挡块;第一推进连板上设有第一夹紧层;第 二推进连板上设有第二夹紧层。 其中,旋转连杆机构升降经过的位置与第三支撑连板、第四支撑连板的运动位置 相配合;距离传感监测机构的检测范围与第一升降调控动力装置调控的升降范围相配合。 其中,装置本体上开设有与第五伸缩连杆机构相配合的连杆调节通槽结构;装置 本体上设有出果盖板。 其中,刮皮刀片上设有两圈渐变倾斜的刀口结构。 3 CN 111588260 A 说 明 书 2/3 页 与现有的技术相比,本发明的有益效果是: 1、本发明通过在装置本体上设置第一伸缩动力装置和第二伸缩动力装置以及相 应的推进连板结构,从而对放置在装置本体内的水果进行推进夹紧操作;通过第三支撑连 板和第四支撑连板对水果进行支撑和下降放行操作; 2、本发明通过在装置本体内设置距离传感监测机构,便于对水果的外形尺寸进行 监测,通过第一升降调控动力装置、第五伸缩动力装置对水果进行定位式的刮皮操作,按照 水果表面尺寸适应性的进行水果刮皮操作,提升了水果的刮皮效果,减少了大量果肉的浪 费。 附图说明 图1为本发明的智能高效型水果刮皮机构装置系统的结构示意图; 图2为图1中A处局部放大的结构示意图; 图3为本发明中的刮片刀片的结构示意图; 其中:1-装置本体;2-上盖板;3-第一内侧挡块;4-第一伸缩动力装置;5-第一推进 连板;6-第一夹紧层;7-第二伸缩动力装置;8-第二推进连板;9-第二夹紧层;10-第三伸缩 动力装置;11-第三推进连杆机构;12-第三支撑连板;13-第四伸缩动力装置;14-第四推进 连杆机构;15-第四支撑连板;16-旋转动力装置;17-旋转连杆机构;18-距离传感监测机构; 19-第一升降调控动力装置;20-升降支架连杆;21-第五伸缩动力装置;22-连杆调节通槽; 23-第五伸缩连杆机构;24-刮皮刀片;25-出果盖板;26-主升降动力装置;27-主升降连杆机 构。











