
技术摘要:
本发明提供一种定位重建方法和装置。定位重建方法,包括以下步骤:获取包括目标对象的至少两帧图像;计算所述目标对象在所述至少两帧图像中的光流;根据所述目标对象的光流计算采集所述图像的图像采集装置的姿态信息;根据所述目标对象的光流和所述图像采集装置的姿态 全部
背景技术:
即使定位重建指的是基于采集到的二维图像在三维地图中重建目标物体模型的 技术,被广泛应用于机器人、增强现实、无人驾驶等领域,以为场景感知提供帮助。但是,由 于传感器本身的噪声和离群点为给位姿估计和建立模型带来了不确定性,导致影响建模效 果,所以现有定位重建方法的建模效果较差。
技术实现要素:
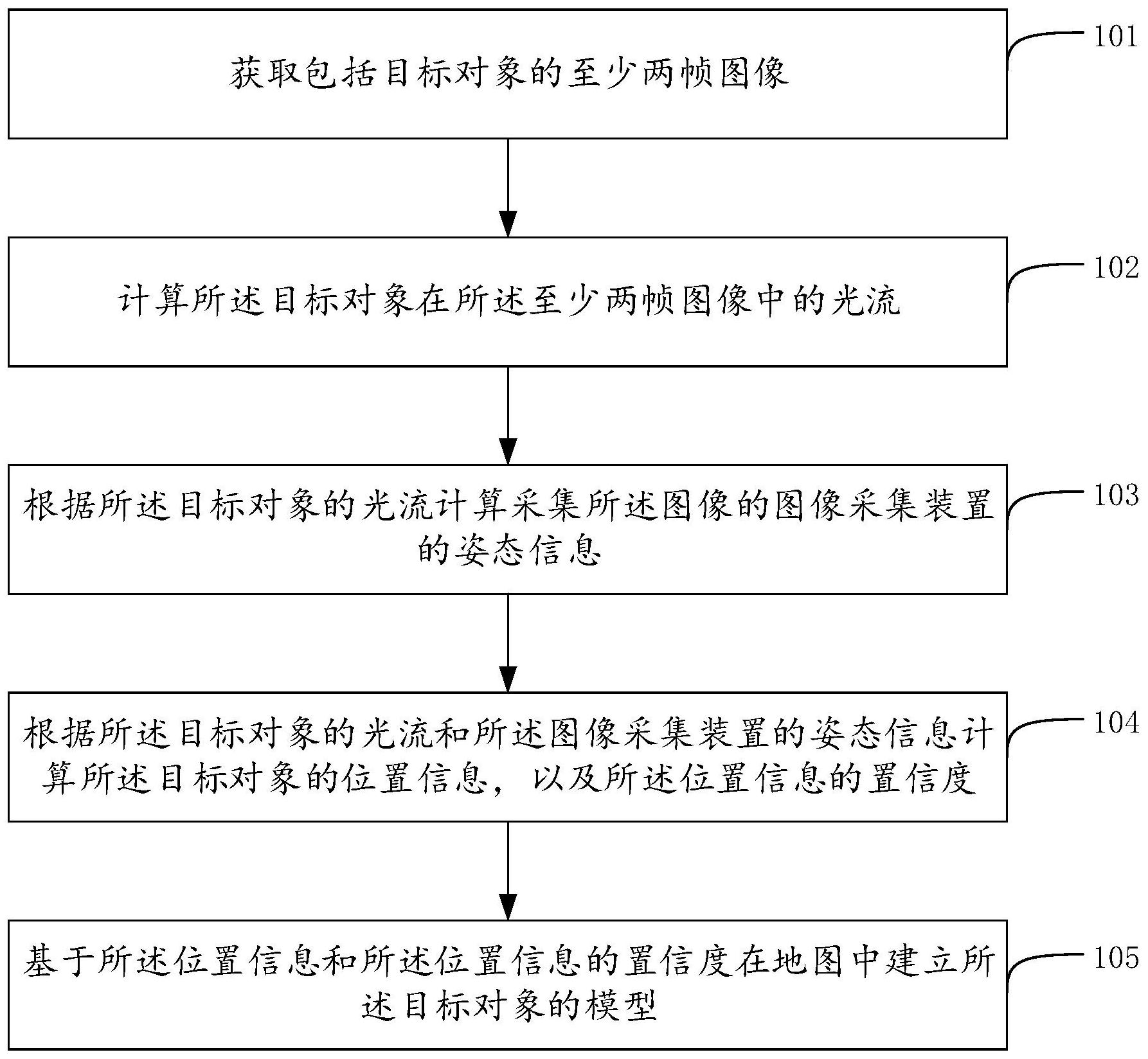
本发明实施例提供一种定位重建方法和装置,以解决现有定位重建方法的建模效 果较差的问题。 第一方面,本发明实施例提供了一种定位重建方法,包括以下步骤: 获取包括目标对象的至少两帧图像; 计算所述目标对象在所述至少两帧图像中的光流; 根据所述目标对象的光流计算采集所述图像的图像采集装置的姿态信息; 根据所述目标对象的光流和所述图像采集装置的姿态信息计算所述目标对象的 位置信息,以及所述位置信息的置信度; 基于所述位置信息和所述位置信息的置信度在地图中建立所述目标对象的模型。 可选的,所述计算所述目标对象在所述至少两帧图像中的光流,包括: 确定所述目标对象上的特征点; 分别计算所述特征点的光流和与所述特征点相邻的多个邻域点的光流。 可选的,所述根据所述目标对象的光流和所述图像采集装置的姿态信息计算所述 目标对象的位置信息,以及所述位置信息的置信度,包括: 基于光流的局部一致性假设,根据所述特征点的光流和与所述特征点相邻的邻域 点的光流计算所述特征点光流的准确程度方差,作为所述特征点的位置信息的置信度。 可选的,所述基于所述位置信息和所述位置信息的置信度在地图中建立所述目标 对象的模型,包括: 在三维地图中以体素构建所述目标对象的模型,其中,组成所述目标对象的体素 有多个,且每一所述体素携带有所述体素位于所在位置的概率信息。 可选的,所述基于所述位置信息和所述位置信息的置信度在地图中对所述目标对 象进行定位和重建之后,还包括: 根据所述目标对象的光流迭代更新所述目标对象的特征点的位置和所述特征点 的置信度。 第二方面,本发明实施例还提供了一种定位重建装置,包括: 获取模块,用于获取包括目标对象的至少两帧图像; 4 CN 111598927 A 说 明 书 2/5 页 光流计算模块,用于计算所述目标对象在所述至少两帧图像中的光流; 姿态计算模块,用于根据所述目标对象的光流计算采集所述图像的图像采集装置 的姿态信息; 位置计算模块,用于根据所述目标对象的光流和所述图像采集装置的姿态信息计 算所述目标对象的位置信息,以及所述位置信息的置信度; 建模模块,用于基于所述位置信息和所述位置信息的置信度在地图中建立所述目 标对象的模型。 可选的,所述光流计算模块包括: 特征点确定子模块,用于确定所述目标对象上的特征点; 计算子模块,用于分别计算所述特征点的光流和与所述特征点相邻的多个邻域点 的光流。 可选的,所述位置计算模块,具体用于基于光流的局部一致性假设,根据所述特征 点的光流和与所述特征点相邻的邻域点的光流计算所述特征点光流的准确程度方差,作为 所述特征点的位置信息的置信度。 第三方面,本发明实施例还提供了一种电子设备,包括处理器、存储器及存储在所 述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时 实现如以上任一项所述的定位重建方法的步骤。 第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现以上任一项所述的定位重建方法的步骤。 这样,本发明实施例通过计算光流信息,从而建立了观测数据、三维地图和相机位 姿三者之间的时空联系,进一步的,通过引入位置信息的置信度,能够更有效地应对位置环 境下的不确定因素,同时充分发挥数据融合的优势,通过概率密度函数保留所有的信息,避 免丢弃数据,从而提高定位和建模的准确程度,有助于提高建模质量。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例描述中所需 要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例, 对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获 取其他的附图。 图1是本发明一实施例提供的定位重建方法的流程图; 图2是本发明一实施例中光流计算的示意图; 图3是本发明一实施例中定位重建方法的流程示意图; 图4是本发明一实施例中定位重建方法的又一流程示意图; 图5是本发明一实施例提供的定位重建装置的结构示意图。











