
技术摘要:
一种扫楼梯扫地两用机器人,包括:机器人主体部分、充电桩、墙壁和楼梯;其通过对称的麦克纳姆轮机构和旋转支撑架连接着的折叠伸缩机构伸缩到合适的位置实现自动爬楼梯,并通过清扫机构自动清扫,从而实现了对复式住宅楼梯和二层的全面清扫,彻底减轻了人的劳动强度; 全部
背景技术:
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一 种,能凭借一定的人工智能,自动在房间内完成地板清理工作,例如专利号:2018111953911 的中国发明专利公开了一种扫地机器人,其包括:壳体, 壳体的下表面凹设有呈长条形的 安装腔,以供扫地机器人的地刷安装;以及刮条,刮条沿着安装腔的轴向延伸并安装于安装 腔的腔口的一侧;其中,壳体还设有通风结构,通风结构供安装腔内的空气流动至刮条邻近 安装腔的腔口的一侧;如此设置,避免了灰尘、纸屑以及其他杂物堆积于刮条邻近安装腔的 腔口的一侧,进而有利于提高扫地机器人的清洁性能; 然而,如上面所述的扫地机器人只能清扫一层的地面,对于上下跃层的复式住宅来说, 其无法实现自动爬楼梯并对楼梯和二层地面进行清扫,因此,我们急需发明针对复式住宅 的一种扫楼梯扫地两用机器人来解决上述技术问题。
技术实现要素:
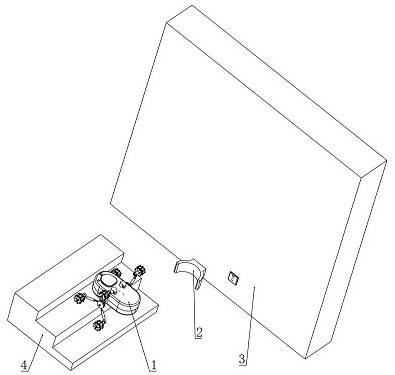
针对上述问题,本发明提供一种扫楼梯扫地两用机器人,其通过对称的麦克纳姆 轮机构和旋转支撑架连接着的折叠伸缩机构伸缩到合适的位置实现自动爬楼梯,并通过清 扫机构自动清扫,从而实现了对复式住宅楼梯和二层的全面清扫,彻底减轻了人的劳动强 度;同时麦克纳姆轮机构能够实现左右移动,从而实现了对楼梯的横向清扫;在清扫地面 时,麦克纳姆轮模块折叠收起,机器人主体部分通过万向电动滚轮移动,由机身模块完成扫 地工作,减少了麦克纳姆轮轮组的磨损,麦克纳姆轮模块折叠收起使得产品更加灵活,还具 有美观性和实用性。 本发明所使用的技术方案是:一种扫楼梯扫地两用机器人,包括:机器人主体部 分、充电桩、墙壁和楼梯; 所述机器人主体部分包括:机身模块、万向电动滚轮、麦克纳姆轮模块、显示屏、开关按 键和控制模块;所述机身模块整体形状由前后半圆形加中间长方形组成,其底部安装有万 向电动滚轮,其左右两侧的长方形边上对称安装有可伸缩折叠的麦克纳姆轮模块,其顶部 前侧安装有显示屏和开关按键,所述控制模块安装在机身模块内部并与显示屏和开关按键 电性连接; 所述墙壁上安装有与机身模块的后侧半圆形相配合的呈圆弧形的充电桩,楼梯连通上 下两层的地面; 通过所述开关按键启动机器人主体部分,通过所述充电桩为机身模块的感应无线电池 充电;当清扫地面时,所述麦克纳姆轮模块折叠收起,所述机器人主体部分通过万向电动滚 轮移动,由所述机身模块完成扫地工作;当清扫楼梯时,所述麦克纳姆轮模块展开,所述机 器人主体部分通过麦克纳姆轮模块在楼梯中上下左右移动,由所述机身模块完成扫楼梯工 4 CN 111588312 A 说 明 书 2/4 页 作,所述显示屏用以实时显示机器人主体部分的工作状态和剩余电量。 进一步地,所述机身模块包括:上壳体、下壳体、视觉传感器、感应无线电池、旋转 支撑轴和清扫机构; 所述机身模块由上壳体和下壳体包覆,所述视觉传感器设置在上壳体的顶部前侧,所 述感应无线电池设置在下壳体内部,所述旋转支撑轴安装在下壳体的两侧,用以安装麦克 纳姆轮模块,所述清扫机构设置在上壳体和下壳体中。 进一步地,所述清扫机构包括:多个抽气机、多个滚筒胶刷、储物盒和收集通道; 所述抽气机安装在上壳体上,其进风口设置在储物盒的上方,其出风口伸出上壳体;所 述储物盒固定安装在下壳体中,所述滚筒胶刷安装在下壳体底部的吸入口处,所述收集通 道联通所述滚筒胶刷和储物盒。 进一步地,所述抽气机设置有两个,所述滚筒胶刷设置有两个。 进一步地,所述麦克纳姆轮模块包括:麦克纳姆轮机构、折叠伸缩机构、步进电机 和旋转支撑架; 所述旋转支撑架通过步进电机转动安装在所述机身模块的旋转支撑轴上,多个所述折 叠伸缩机构的一端均匀安装在旋转支撑架的外侧圆周面上,所述麦克纳姆轮机构安装在折 叠伸缩机构的另一端。 进一步地,所述折叠伸缩机构包括:电动伸缩杆和折叠电机; 所述电动伸缩杆一端铰接在旋转支撑架中,另一端与麦克纳姆轮机构相连接,所述折 叠电机固定安装在旋转支撑架上,其电机轴与电动伸缩杆相连接,用以驱动电动伸缩杆旋 转。 进一步地,所述折叠伸缩机构共有3个。 进一步地,所述麦克纳姆轮机构包括:支撑块、橡胶轮、轮毂、连接铜柱、螺钉、驱动 电机和电机支架; 所述电机支架固定安装在电动伸缩杆上,所述驱动电机固定安装在电机支架上,其电 机轴与轮毂相连接,两侧的轮毂通过连接铜柱连接在一起,橡胶轮通过两边的支撑块安装 在轮毂,连接铜柱的两端通过螺钉固定在轮毂上。 进一步地,所述控制模块由单片机进行控制。 由于本发明采用了上述技术方案,本发明具有以下优点: (1)本发明通过对称的麦克纳姆轮机构和旋转支撑架连接着的折叠伸缩机构伸缩到合 适的位置实现自动爬楼梯,并通过清扫机构自动清扫,从而实现了对复式住宅楼梯和二层 的全面清扫,彻底减轻了人的劳动强度; (2)本发明的麦克纳姆轮机构能够实现左右移动,从而实现了对楼梯的横向清扫; (3)本发明在清扫地面时,麦克纳姆轮模块折叠收起,机器人主体部分通过万向电动滚 轮移动,由机身模块完成扫地工作,减少了麦克纳姆轮轮组的磨损,麦克纳姆轮模块折叠收 起使得产品更加灵活,还具有美观性和实用性。 附图说明 图1为本发明的整体结构示意图。 图2-3为本发明机器人主体部分的结构示意图。 5 CN 111588312 A 说 明 书 3/4 页 图4-6为本发明机身模块的结构示意图。 图7为本发明麦克纳姆轮模块的结构示意图。 图8为本发明折叠伸缩机构的结构示意图。 图9为本发明麦克纳姆轮机构的结构示意图。 附图标号:1-机器人主体部分;2-充电桩;3-墙壁;4-楼梯;101-机身模块;102-万 向电动滚轮;103-麦克纳姆轮模块;104-显示屏;105-开关按键;1011-上壳体;1012-下壳 体;1013-视觉传感器;1014-感应无线电池;1015-旋转支撑轴;1016-抽气机;1017-滚筒胶 刷;1018-储物盒;1019-收集通道;1031-麦克纳姆轮机构;1032-折叠伸缩机构;1033-步进 电机;1034-旋转支撑架;10321-电动伸缩杆;10322-折叠电机;10311-支撑块;10312-橡胶 轮;10313-轮毂;10314-连接铜柱;10315-螺钉;10316-驱动电机;10317-电机支架。











