
技术摘要:
本发明涉及一种水平全方向移动的同轴双轮汽车搬运机器人,搬运机器人包括搬运底板、行走装置、控制组件和多个万向从动轮,控制组件与行走装置电连接,行走装置和多个万向从动轮设于搬运底板的底部,行走装置包括转向组件和两个主动轮组件,转向组件包括转向电机和转向 全部
背景技术:
随着经济的快速发展,人们对物质生活的要求不断提高,汽车正成为一般的代步 工具走进人们的生活,近年来,汽车行业得到了蓬勃发展,汽车保有量不断上升,停车位少、 停车难也正成为城市发展急需考虑的问题。智能化泊车方式能够有效解决上述难题,正在 稳步发展。 智能化泊车方式主要有自动泊车和智能化车库两大类,自动泊车主要依赖于车辆 自身的自动泊车系统,目前主要装配在高端豪华车上,成本较高且技术尚不成熟,难以推广 到普通车辆;智能化车库主要依赖于汽车搬运机器人将车辆搬运至车库,实现智能泊车。目 前汽车搬运机器人主要有梳齿式、车抬板式和夹轮胎式三种,但现有的汽车搬运机器人大 都结构复杂,在变向和移动的灵活性上较差。
技术实现要素:
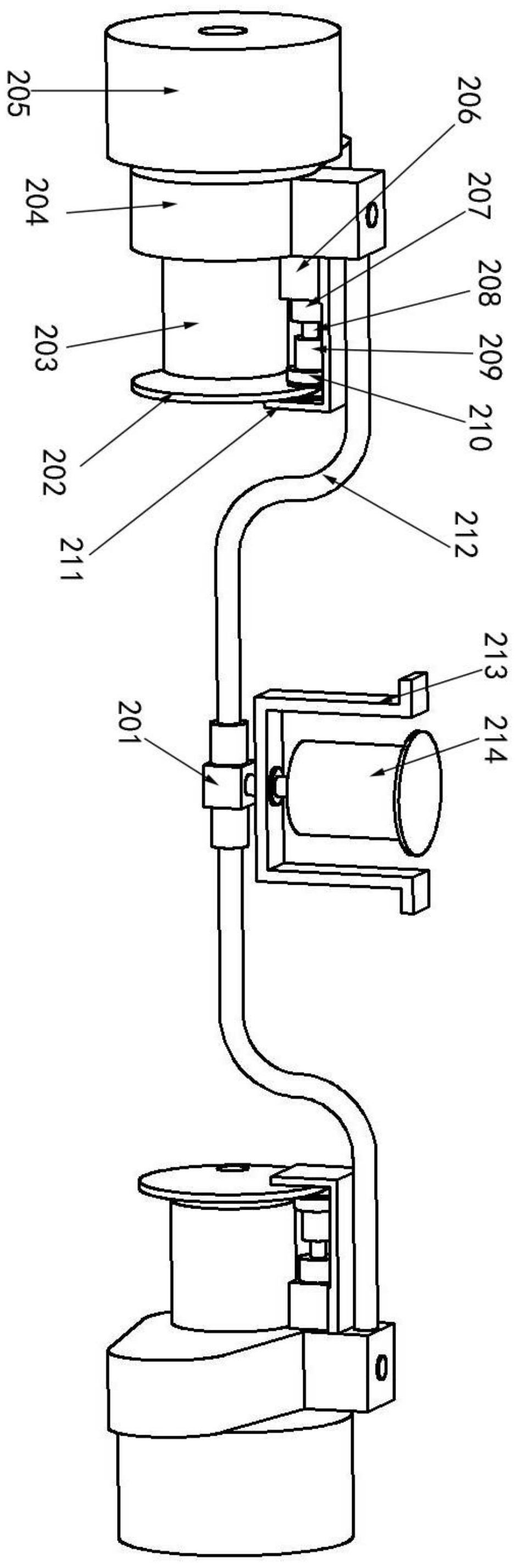
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种水平全方向移 动的同轴双轮汽车搬运机器人。 本发明的目的可以通过以下技术方案来实现: 一种水平全方向移动的同轴双轮汽车搬运机器人,所述的搬运机器人包括搬运底 板、行走装置、控制组件和多个万向从动轮,所述的控制组件与行走装置电连接,所述的行 走装置和多个万向从动轮设于搬运底板的底部,所述的行走装置包括转向组件和两个主动 轮组件,所述的转向组件包括转向电机和转向轴,所述的转向电机固定于搬运底板的底部, 所述的转向电机的输出轴与转向轴的中部固定连接,所述的转向轴的两端对称设置所述的 两个主动轮组件,使用时,所述的转向电机带动转向轴在水平方向转动,所述的转向轴带动 所述的两个主动轮组件同轴转动,主动轮组件运行带动搬运底板移动。 优选地,所述的转向组件还包括转向固定座,所述的转向固定座的顶部与搬运底 板固定连接,并且所述的转向固定座沿竖直方向绕转向电机设置,所述的转向轴包括呈倒T 型的转向连接座,所述的转向连接座固定于转向轴的中部,所述的转向连接座的顶端穿过 转向固定座并与转向固定座形成转动副,所述的转向电机的输出轴与转向连接座的顶端固 定连接。 优选地,所述的转向轴还包括两个转向连接轴,所述的转向连接座底部的两端分 别与两个转向连接轴固定连接。 优选地,所述的主动轮组件包括主动轮、制动子组件和驱动子组件,所述的驱动子 组件与转向轴的端部固定连接,所述的主动轮与驱动子组件的输出轴固定连接,制动子组 件固定设于驱动子组件上,所述的制动子组件的输出轴限制所述的驱动子组件输出轴的转 4 CN 111550105 A 说 明 书 2/4 页 动。 优选地,所述的驱动子组件包括驱动电机、驱动电机减速器,所述的驱动电机减速 器与转向轴的端部固定连接,所述的驱动电机与驱动电机减速器固定连接,所述的驱动电 机的输出轴与驱动电机减速器的输入轴固定连接,所述的驱动电机减速器的输出轴与主动 轮固定连接。 优选地,所述的制动子组件包括制动盘、制动基板和沿远离驱动子组件方向依次 设置的制动电机、制动电机减速器、丝杠、滚珠螺母和制动钳,所述的制动盘设于驱动子组 件的输出轴上,所述的制动基板的端部与驱动子组件固定连接,所述的制动电机与驱动子 组件固定连接,所述的制动电机的输出端与制动电机减速器的输入端固定连接,所述的制 动电机减速器的输出轴与丝杠固定连接,所述的滚珠螺母套设于丝杠的末端,所述的制动 钳与所述的制动盘相邻设置,所述的制动钳的顶端与制动基板固定连接,所述的滚珠螺母 的末端与制动钳的前端固定连接, 制动时,所述的制动电机运行带动所述丝杠转动,使滚珠螺母向丝杠远端移动挤 压制动钳,所述的制动钳与制动盘接触摩擦,限制驱动子组件输出轴的转动。 优选地,所述的制动电机减速器为涡轮蜗杆减速器。 优选地,所述的驱动电机为双轴驱动电机,所述的驱动电机包括第一输出轴和第 二输出轴,所述的第一输出轴与驱动电机减速器的输入轴固定连接,制动子组件的输出轴 限制第二输出轴的转动。 优选地,所述的驱动电机减速器为齿轮传动减速器、行星齿轮减速器、带传动减速 器、链传动减速器中的一种。 优选地,所述的控制组件包括导航定位器和主控制器,所述的导航定位器、主动轮 组件和转向组件分别与主控制器连接。 优选地,所述的导航定位器采用激光导航、电磁导航、惯性导航方式中的一种。 优选地,所述的搬运机器人还包括电源组件,所述的电源组件分别与行走装置和 控制组件连接。 优选地,所述的万向从动轮为可停驻式万向轮。 与现有技术相比,本发明具有如下优点: (1)本发明行走装置的转向组件通过转向电机和转向轴配合,带动主动轮组件在 水平方向360度旋转,进而使本发明的搬运机器人实现在水平面内各个方向移动的功能,机 动性和灵活性高; (2)本发明的转向电机、制动电机、驱动电机均通过对应减速器对外输出,可根据 具体载荷及空间要求对减速器进行选配以达到最佳性能,节省设备空间; (3)本发明的制动子组件通过丝杠、丝杠、滚珠螺母和制动钳配合制动,能够有效 调节制动的反应速度和对应制动强度,提高搬运机器人运行的准确性; (4)本发明采用可停驻式万向轮,便于本发明的搬运机器人停止使用时稳定停驻。 附图说明 图1为本发明的仰视图; 图2为本发明的主视图; 5 CN 111550105 A 说 明 书 3/4 页 图3为本发明的侧视图; 图4为本发明的轴测图; 图5为本发明的行走装置的半侧结构示意图; 图6为本发明的行走装置的仰视图; 图7为本发明的行走装置的右视图; 图8为本发明的行走装置的轴测图。 其中,1、万向从动轮,2、行走装置,3、搬运底板,4、导航定位器,5、主控制器,6、电 源组件,201、转向连接座,202、制动盘,203、驱动电机,204、驱动电机减速器,205、主动轮, 206、制动电机,207、制动电机减速器,208、丝杠,209、滚珠螺母,210、制动钳,211、制动基 板,212、转向连接轴,213、转向固定座,214、转向电机。











