
技术摘要:
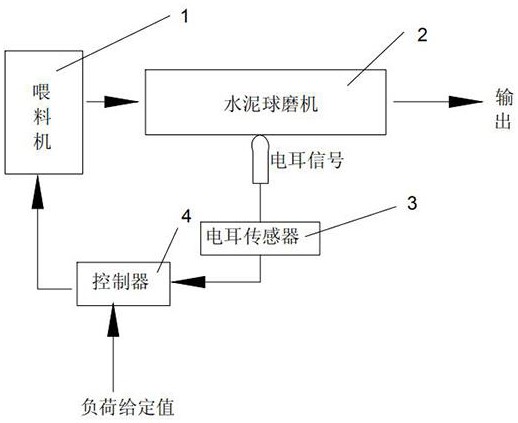
本发明公开了一种水泥球磨机的负荷控制系统,包括以下部件:喂料机;对喂料机输送过来的料进行研磨的水泥球磨机;设于水泥球磨机外并用来检测水泥球磨机内物料填充率的电耳传感器;与电耳传感器电连接,并预先储存有负荷给定范围的控制器;其中所述的控制器还与喂料机 全部
背景技术:
水泥球磨机主要应用于水泥厂成品及原料的粉磨,也适用于冶金、化工、电力等工 矿企业粉磨各种矿石及其它可磨性物料:工作时,物料由进料装置经入料中空轴螺旋均匀 地进入水泥球磨机第一仓,该仓内有阶梯衬板或波纹衬板,内装不同规格钢球,筒体转动产 生离心力将钢球带到一定高度后落下,对物料产生重击和研磨作用。物料在第一仓达到粗 磨后,经单层隔仓板进入第二仓,该仓内镶有平衬板,内有钢球,将物料进一步研磨。粉状物 通过卸料箅板排出,完成粉磨作业。水泥球磨机粉磨物料的主要工作部分发生在水平低速 回转的筒体上,当筒体被传动装置带动回转时,研磨体由于惯性离心力的作用,贴附在磨机 筒体内壁的衬板面上与之一起回转,被带到一定高度后,借重力作用自由落下,此时研磨体 将筒体内物料击碎,同时研磨体在回转的磨机内除有上升、下落的循环运动外,还会产生滑 动和滚动,致使研磨体、衬板和被磨物料之间发生研磨作用使物料磨细。物料在受到冲击破 碎和研磨磨碎的同时,借进料端和出料端的物料本身料面高度差,使物料由进料端向出料 端缓缓流动,完成粉磨作业。 由于水泥熟料粉磨操作是水泥生产的最后一道工序,其运行情况直接影响水泥的 产量和质量。近年来,微机自动配料系统在我国众多水泥厂已得到广泛应用,但水泥球磨机 负荷的自动监控仍处于较落后的状态,大多数水泥厂依然靠人工判断、手动操作,致使磨机 负荷不能保持在最佳状态,能耗大、产量低,质量也难以保证。 目前最常见的方法是通过“基于误差反馈消除误差”的PID控制方式来进行调整, 由于“基于误差反馈消除误差”是PID控制技术的精髓,但实际情况中直接取目标与实际行 为之间的误差常常会使初始控制力太大而使系统行为出现超调,而这正是导致使用PID控 制技术的闭环系统产生“快速性”和“超调”不可调和矛盾的主要原因,因此传统PID控制器 的微分环节对误差微分的提取不太合理,若在输入信号中含有噪声,传统的微分器很容易 导致严重的噪声放大效应,而噪声影响直接会导致误差变大,最终出现负荷控制不符合要 求的问题。因此如何解决水泥球磨机负荷控制的噪声放大问题,以此解决水泥球磨机的负 荷控制过程中的误差问题显得尤为重要。
技术实现要素:
本发明的目的是为了解决上述现有技术的不足而提供一种能够解决水泥球磨机 的负荷控制过程中的误差问题的一种水泥球磨机的负荷控制系统及其方法。 为了实现上述目的,本发明得到的一种水泥球磨机的负荷控制系统,包括以下部 件: 一个能够对料进行输送的喂料机; 4 CN 111570072 A 说 明 书 2/6 页 对喂料机输送过来的料进行研磨的水泥球磨机; 设于水泥球磨机外并用来检测水泥球磨机内物料填充率的电耳传感器; 与电耳传感器电连接,并预先储存有负荷给定范围的控制器; 其中所述的控制器还与喂料机进行电连接,并通过实时获取电耳传感器的实时负 荷信号后,与预先设置的负荷给定范围进行对比后优化水泥球磨机工作过程中环境对喂料 机的给料量的影响问题,最终获得合适的给料量,从而实现将环境对给料量影响进行自动 调节的过程。 本发明公开了一种水泥球磨机的负荷控制方法,该方法采用跟踪微分器以及单神 经元学习策略组合后,并能合理安排过渡过程、克服噪声,同时能根据被控对象的变化,自 学习来变动PID的增益的非线性单神经元控制结构,该非线性单神经元控制结构具体包括 以下步骤: Step0、给定初始权值; Step1、实时采集“电耳”信号y; Step2、将信号输入跟踪微分器,得到z1、z2; Step3、将反映水泥球磨机负荷的电耳给定值信号,输入跟踪微分器的设计过渡过 程,得到V1、V2; Step4、进行比较,得出误差公式: x1(t)=v1-z1=e(t); 及其导数公式: x3(t)=v2-z2=Δe(t)/T Step5、将误差通过积分器进行积分,得到以下公式: Step 6、通过单神经元(8)学习获得单神经的输出公式(一)和输出公式(二): Step7、将得到的x1(t)、x2(t)、x3(t)三者信号分别送入单神经元内,由单神经元的 输出公式(一)得到以下公式: 其中:W为权向量; Step8、再将p(t)输入单神经元的输出公式(二),得到以下公式: 5 CN 111570072 A 说 明 书 3/6 页 其中:pmax为最大控制量 Step9、最终获得最佳喂料量u(t),然后将喂料量u(t)施加到水泥球磨机上; Step10、根据性能指标公式(三): 判断性能指标是否满足要求,否,按照权值学习算法公式(四):wi(t 1)=wi(t) Δ wi(t) 更新权值后,返回步骤step1;是,结束。 本发明得到的一种水泥球磨机的负荷控制系统及其方法,通过预先设置负荷给定 范围,然后通过实时获取电耳信号后,将其输送给微分器,进行处理后,利用跟踪微分器的 设计过渡过程数量后,将误差进行积分,后将得到的三者信号分别送入单神经元内学习后, 最终获得最佳喂料量,然后输送给水泥球磨机的过程,因此通过上述结构的设计能够有效 的对水泥球磨机内产生的噪音进行处理,避免由于噪音对喂料量控制而产生误差的问题, 最终获得最合适的喂料量数量,以此解决水泥球磨机的负荷控制过程中由于噪声影响给定 值而产生误差放大现象问题。 附图说明 图1是实施例1中一种水泥球磨机的负荷控制系统的结构示意图; 图2是实施例1中一种水泥球磨机的负荷控制系统中跟踪微分器的单神经元控制 框图; 图3是实施例1中电耳电压与水泥球磨机负荷的曲线示意图。 图中:喂料机1、水泥球磨机2、电耳传感器3、控制器4、跟踪微分器5、跟踪微分器的 设计过渡过程6、积分器7、单神经元8。











