
技术摘要:
一种基于超级计算机的低功耗穿戴式定位设备与定位方法,定位方法包括以下步骤:S1:当判断客户端处于安全状态或初始状态时,客户端以设定频率将IMU的缓存数据上传至服务器端;超算中心利用粒子滤波算法对粒子采样数据进行计算,获得当前客户端所处位置的最大似然估计和 全部
背景技术:
将儿童穿戴式设备用于学生位置跟踪近年来已经是一个比较常见的技术,通常用 到卫星导航系统和惯性测量单元进行位置采集。 其中,卫星导航系统(Global Navigation Satellite System,GNSS):是覆盖全球 的自主地利空间定位的卫星系统,允许小巧的电子接收器确定它的所在位置(经度、纬度和 高度),并且经由卫星广播沿着视线方向传送的时间信号精确到10米的范围内。接收机计算 的精确时间以及位置,可以作为科学实验的参考。GNSS存在四个问题:GNSS信号具有很强的 指向性,很容易被建筑物遮挡;GNSS接收器有几十秒甚至更长时间的热启动和冷启动时间; GNSS的位置更新率被限制为每秒一次,该更新率不够快;GNSS精度为米级,该分辨率对于许 多嵌入式应用而言太过粗糙。因此,需要结合惯性测量单元进行定位。 惯性测量单元(Inertial measurement unit,简称IMU):是测量物体三轴姿态角 (或角速率)以及加速度的装置。一般情况,一个IMU包含了三个单轴的加速度计和三个单轴 的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体 相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算 出物体的姿态。单独使用IMU能够得到物体行为姿态,而不能够得到绝对位置的信息,通过 与GNSS数据融合,能够得到精确的定位数据。然而IMU存在以下缺点:陀螺仪通过角速度变 化检测方向,但随着时间推移,陀螺仪往往会漂移,因为它仅检测变化而没有固定的参考 系。将加速度计数据添加到陀螺仪数据中,可以最大限度地减小陀螺仪偏置,从而得到更准 确的位置估计。加速度计检测相对于重力的方向变化,该数据可用于给陀螺仪定向。加速度 计反应迅速,若只使用该数据,加速度计抖动和噪声会产生累积误差。此外,由于重力之类 的外力,加速度计往往会使加速度失真,这也会作为噪声在系统中累积。此时需要融合滤波 来减少误差。 例如2014年,已出现穿戴式设备、手机客户端、云服务器三方联系的模式,申请号 [201410271647.8]使用MEAN架构实现该模式,主要是穿戴式设备将经纬度发送到服务器, 服务器提供该位置的街景图片并合成轨迹路线,在手机客户端app内显示,此专利也提出了 一种适用于小孩上学放学情景的低功耗数据采集方案。申请号为[201610430562.9]的专 利,公开了一种客户端的定位方法与装置,在能够得到粗略位置的前提下,对收集到的用户 位置信息进行粒子滤波,最终得到精确位置。专利号为[201711032385.X]的专利,提出了一 种高精度定位解算方法和系统,包括基准站,云端服务器以及用户终端。专利号为 [201710302579.0]的专利提供了一种GNSS精密后处理任务的调度系统,用于并发式计算情 景下的任务调度。 然而上述各方案均存在以下缺陷: 4 CN 111551977 A 说 明 书 2/8 页 1)现有方法对GNSS数据和IMU数据融合进行高精度定位的方法都属于脱机处理方 法,无法在数据提交时立刻得到结果; 2)现有方法采集GNSS数据和IMU数据与后处理过程完全脱节,造成了采集过程不 必要的能量消耗,无法适用于穿戴式设备的低功耗要求。
技术实现要素:
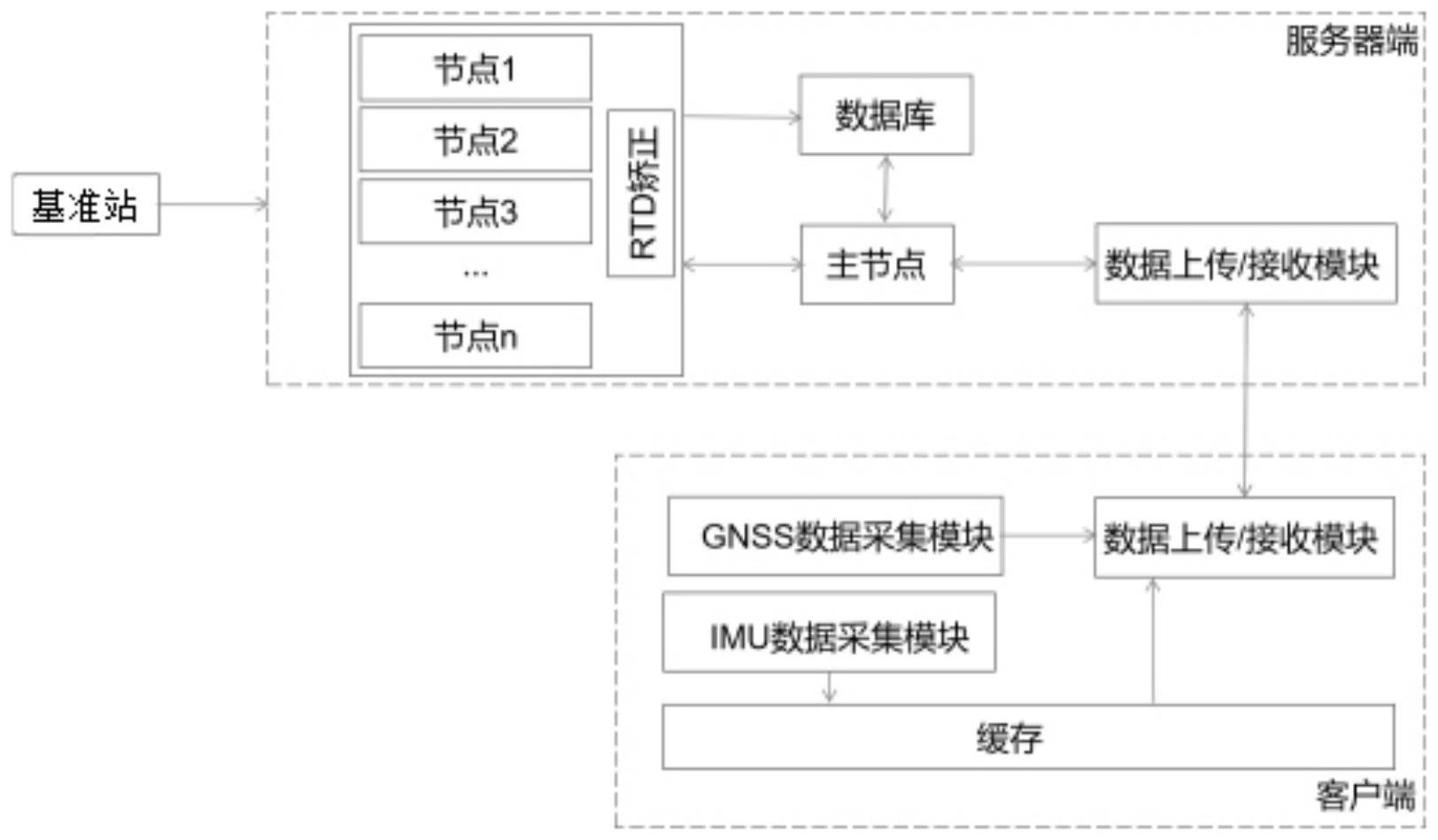
本发明的目的是克服现有技术的上述不足而提供一种定位精度高,功耗低的基于 超级计算机的低功耗穿戴式定位设备与定位方法。 本发明的技术方案是: 本发明之一种基于超级计算机的低功耗穿戴式定位方法,包括以下步骤: S1:当判断客户端处于安全状态或初始状态时,客户端以设定频率将IMU的缓存数 据上传至服务器端,作为粒子采样数据;超算中心利用粒子滤波算法对粒子采样数据进行 计算,获得当前客户端所处位置的最大似然估计,再根据最大似然估计和当前所有粒子分 布,获得上送周期P,以及计算出客户端是否处于危险状态; S2:当判断客户处于危险状态时,服务器端则返回上送周期P和控制指令至客户 端,使客户端以1/P的频率将IMU的缓存数据上传至服务器端;同时启动客户端的GNSS数据 采集模块开始工作,实时上传GNSS的原始观测数据至服务器端,由服务器端的超算中心对 原始观测数据进行位置解算; S3:服务器端对IMU数据与GNSS数据进行融合处理,计算得到客户端的位置数据与 危险边界的距离。 进一步,所述上送周期P通过以下公式获得: P=(1-S1/S)*10 式中,S1为穿戴式设备与危险区域距离小于目标距离的粒子数量;S为参与计算的 总粒子数量。 进一步,当服务器端计算得到上传周期P<5时,通知客户端启动GNSS数据采集模块 开始工作。 进一步,S2中,所述对原始观测数据进行位置解算的方法包括以下步骤: S21:超算中心周期性地从基准站获得每个卫星j的伪距改正值。其中,伪距原始测 量值 表达为: 式中,i为基准站接收机,用于接收卫星j的播送信号, 表示为卫星j到基准站接 收机i真实的星站距离:δti、δtj分别表示基准站接收机的时钟相对于GNSS时间系统的时钟 偏差及卫星j时钟相对于GNSS时间系统的时钟偏差; 为电离层时间延迟引起的距离偏 差;δT ji 表示对流层时间延迟引起的距离误差; 表示GNSS卫星播送的星历误差引起的距 离误差; S22:由基准站计算伪距改正值 并发送给超算中心的主节点,超 5 CN 111551977 A 说 明 书 3/8 页 算中心的主节点将该数据分发给参与计算的所有计算节点,计算节点获得伪距改正值后缓 存至数据库中; S23:当穿戴式设备收到其自身GNSS数据采集模块测得的原始观测数据后,无需进 行定位演算而直接将数据传输到超算中心,超算中心的主节点将接收到的原始观测数据分 发给参与计算的所有计算节点,计算节点获得原始观测数据并与事先缓存的伪距改正值 delta[j]进行运算,再通过伪距改正值获得的近似三维坐标参数,从而每台计算节点根据 线性最小方差法解算t时刻的客户端的GNSS三维位置坐标(x,y,z)。 进一步,S1中,所述粒子滤波算法包括以下步骤: 超算中心分配n个处理器节点用于客户端的位置估计,处理器节点n对应其当前处 理的m个粒子; 根据粒子上一时刻的位姿xt-1,即粒子上一时刻的三维坐标值(x,y,z),以及该时 刻采样点的IMU数据ut来预测当前时刻粒子位姿xt,公式如下: 式中,m为该粒子标识; 计算出每一个粒子的权重,权重计算方式为: 式中,zt为在时刻t的观测值;xt是预测出来的t时刻位姿; 所有节点计算出来的粒子中,最大权重值的粒子则为当前客户端位置的最大似然 估计;然后根据新的概率密度分布,采用n*m个粒子,分配到每个计算节点上。 进一步,超算中心的主节点根据各处理器节点返回的客户端位置最大似然估计以 及当前所有粒子分布,取出权重值前5%的粒子位置来获得客户端与危险区域距离小于目 标距离的粒子数量,进而获得返回给客户端的上送周期P。 进一步,S3中,服务器端对IMU数据与GNSS数据进行融合处理,来获得各节点计算 出来的位置数据与危险边界的距离,并将客户端的位置信息绘制成行为轨迹预测曲线,结 合穿戴式设备周围标志物判断客户端当前是否处于危险状态,并根据该判断返回控制指令 到客户端,客户端根据收到的控制指令调整下一次上传数据时间。 进一步,所述超算中心的计算过程采用多台处理器并行运算方式。 本发明之一种基于超级计算机的低功耗穿戴式定位设备,包括: 客户端,为穿戴式设备,穿戴式设备上设置有主控模块、GNSS数据采集模块、IMU数 据采集模块和网络通信模块,主控模块用于根据服务器端发送的控制指令和上传周期来发 送GNSS原始观测数据和IMU缓存数据至服务器端; 服务器端,服务器端布置有主节点和多个并行排列的节点1~n,作为超算中心,主 节点通过网络通信模块与穿戴式设备以及基站进行信息传输;超算中心用于利用粒子滤波 算法对客户端发送的IMU缓存数据进行计算,获得当前客户端所处位置的最大似然估计,再 根据最大似然估计和当前所有粒子分布,获得上送周期P,以及计算出客户端是否处于危险 状态;用于判断客户处于危险状态时,则返回上送周期P和控制指令至客户端,使客户端以 1/P的频率将IMU的缓存数据上传至服务器端;同时启动客户端的GNSS数据采集模块开始工 作,实时上传GNSS的原始观测数据至服务器端,由服务器端的超算中心对原始观测数据进 6 CN 111551977 A 说 明 书 4/8 页 行位置解算;还用于对IMU数据与GNSS数据进行融合处理,来获得各节点计算出来的位置数 据与危险边界的距离。 进一步,所述主节点和多个节点1~n的信息传输接口为MPI。 本发明的有益效果: (1)现有方法对GNSS数据和IMU数据融合进行高精度定位的方法都属于脱机处理 方法,无法在数据提交时立刻得到结果。本专利提出实时的高精度定位方法,在服务器返回 控制指令后,客户端的上传频率根据控制指令进行调整,因此短时间内需要处理大量数据 并立刻返回结果,提出使用超级计算机并行性计算解决该问题,服务器端的并行式处理器 同时运作,解决了高精度定位带来的复杂计算问题; (2)现有方法采集GNSS数据和IMU数据与后处理过程完全脱节,造成了采集过程不 必要的能量消耗,无法适用于穿戴式设备的低功耗要求。对于这种情况,给出了降低功耗的 定位方案,服务器根据穿戴式设备当前位置信息给出预判,并结合预判以及设定的阈值反 馈给穿戴式设备以调整具体的上传频率,总体上大大降低高精度定位的功耗,即后处理结 果影响数据采集上传过程,减少不必要的功耗。 (3)本发明中,高精度GNSS定位主要是利用被定位终端附近的固定基准站来减少 卫星信号干扰带来的定位误差。在穿戴式设备上进行持续高精度定位的主要难题在于所需 能耗过高,而定位能耗主要来自于卫星信号解码和位置解算过程。本发明通过将位置解算 转移到超级计算机中,并用粒子滤波算法对客户端位置进行实时预测,仅在客户端靠近危 险区域时才启动GNSS测量,从而显著减低了客户端设备的功耗。 附图说明 图1是本发明实施例的电路结构示意框图; 图2是本发明实施例的定位方法流程图。











