
技术摘要:
本发明涉及车辆位置标识的技术领域,提供了一种在监控视频中标识车辆位置的方法及系统。其方法包括步骤:S1:在监控视频的监控区域中,预设若干个控制点,针对每一个所述控制点,同时获取所述控制点的GPS坐标和所述控制点在监控画面中二维坐标;S2:根据同一所述监控画 全部
背景技术:
近年来国内航空业发展强劲,10年来航空旅客的年化增速达14%,2018年民航旅 客量达到6亿人次,随之而来的是机场安全生产压力越来越大。近些年,国内外多次出现车 辆入侵事故,相当部分是由于车辆误入飞行区或停机区。 机场的车辆管理系统,通过给车辆安装了GPS设备,可以实时获得车辆的GPS坐标 信息。当车辆违规进入飞行区或者停机区时,车辆管理系统能够发出报警信息提示机场管 理人员。 机场的视频监控系统,机场管理人员可以实时获得飞行区和停机区等区域的监控 画面。由于飞行区和停机区面积广阔,在监控画面中,普通车辆的像素较小,通过图像识别 技术无法直接识别出车辆。 当有车辆违规进入飞行区或停机区时,管理人员虽然得到车辆管理系统的报警信 息提示,但是很难通过肉眼在监控画面中查找到该车辆,造成严重的安全隐患。 如何将车辆的位置在监控画面中标识出来,是个急需解决的问题。
技术实现要素:
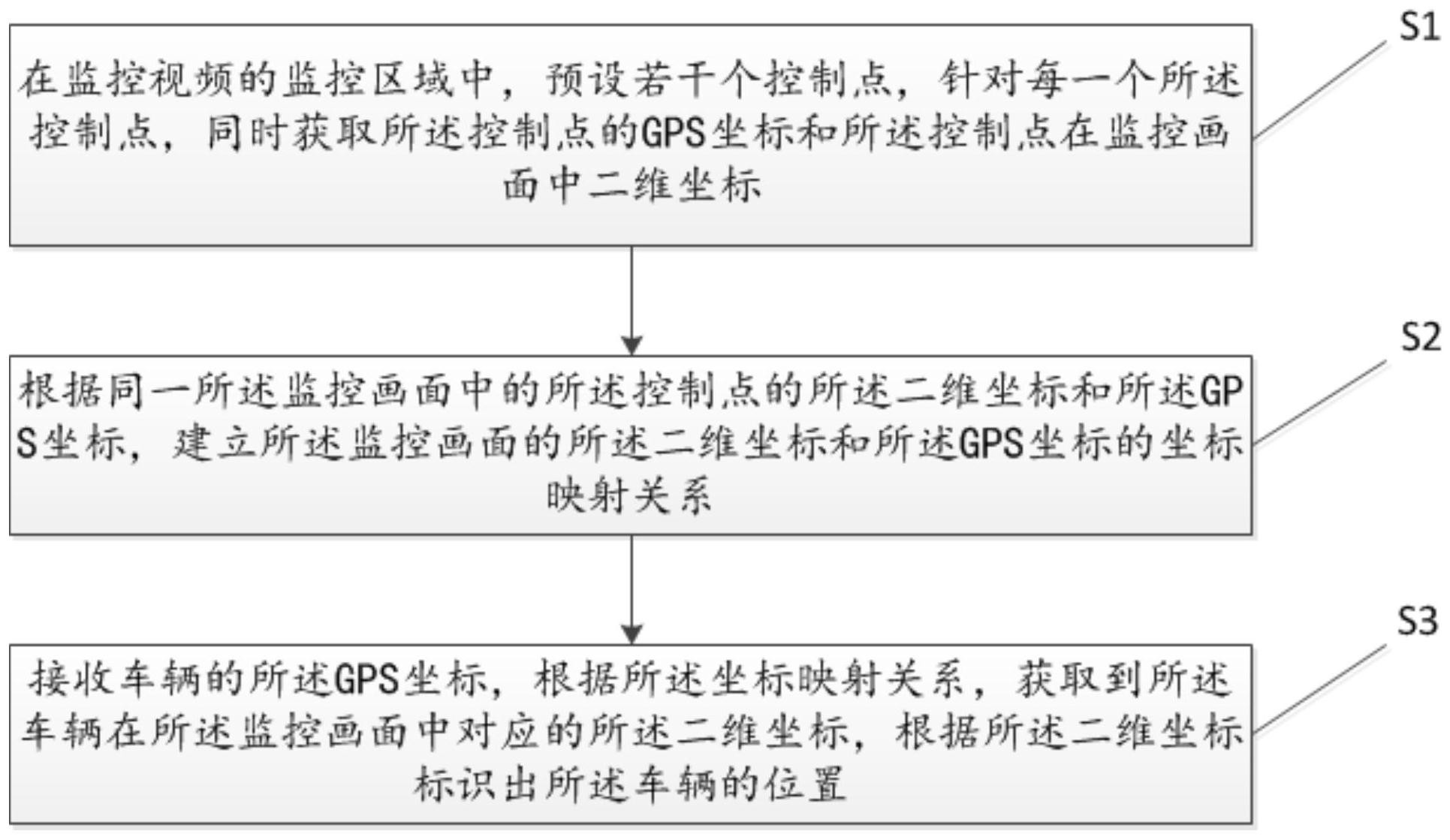
针对上述问题,本发明的目的在于提供一种在监控视频中标识车辆位置的方法及 系统,能够将车辆的位置在监控画面中标识出来,使得机场管理人员可以直接通过肉眼在 监控画面中很清楚的查找到车辆的位置。 本发明的上述发明目的是通过以下技术方案得以实现的: 一种在监控视频中标识车辆位置的方法,包括以下步骤: S1:在监控视频的监控区域中,预设若干个控制点,针对每一个所述控制点,同时 获取所述控制点的GPS坐标和所述控制点在监控画面中二维坐标; S2:根据同一所述监控画面中的所述控制点的所述二维坐标和所述GPS坐标,建立 所述监控画面的所述二维坐标和所述GPS坐标的坐标映射关系; S3:接收车辆的所述GPS坐标,根据所述坐标映射关系,获取到所述车辆在所述监 控画面中对应的所述二维坐标,根据所述二维坐标标识出所述车辆的位置。 进一步地,在步骤S1中,获取所述控制点在监控画面中的二维坐标,具体为: 采集所述控制点的图像,通过包括基于深度神经网络的图像识别和定位的开源算 法在内的图像训练方法,生成所述控制点的图像模型,建立图像模型库; 根据所述图像模型库中的所述图像模型,识别出所述监控画面中的所述控制点, 获取所述控制点在所述监控画面中的所述二维坐标。 进一步地,建立所述图像模型库的具体步骤为: 4 CN 111597954 A 说 明 书 2/10 页 采集各个所述控制点的图像,其中所述图像包括在不同天气,不同光线,不同角 度,不同距离在内的不同条件下的所述图像; 针对采集的所述图像,进行包括对所述图像进行水平和垂直翻转、随机裁剪、随机 角度旋转、改变图像对比度和亮度在内的预处理; 针对采集的所述图像,标注所述图像对应的所述控制点的类别和位置,形成所述 图像相匹配的标注数据,并且同时建立训练文件库,将所述标准数据放置于所述训练文件 库中; 建立对所述图像进行训练所需要的配置文件,通过包括YOLO算法在内的基于深度 神经网络的图像识别和定位的开源算法,对所述图像进行训练,生成所述图像模型库。 进一步地,在生成所述图像模型库之后,还包括: 当所有的所述控制点识别无误后,计算所述监控画面中任意两个所述控制点的所 述二维坐标之间的相对位置和角度作为所述控制点之间的相对位置和角度标准; 在后续识别所述控制点时,再次计算所述控制点之间的相对位置和角度,与所述 相对位置和角度标准进行对比,当所述控制点之间的相对位置和角度与所述相对位置和角 度标准中记录的值的偏差超过预设误差值,则所述控制点识别错误。 进一步地,在步骤S3中,根据所述二维坐标标识出所述车辆的位置,还包括: 针对所述监控视频做图像处理,在所述车辆在所述监控画面中对应的所述二维坐 标上,通过包括框图在内的方式,在所述监控画面中标识出所述车辆的位置。 为了执行上述方法,本发明还提供了一种在监控视频中标识车辆位置的系统,包 括控制点预设模块,映射关系建立模块,车辆位置标识模块; 所述控制点预设模块,用于在监控视频的监控区域中,预设若干个控制点,针对每 一个所述控制点,同时获取所述控制点的GPS坐标和所述控制点在监控画面中二维坐标; 所述映射关系建立模块,用于根据同一所述监控画面中的所述控制点的所述二维 坐标和所述GPS坐标,建立所述监控画面的所述二维坐标和所述GPS坐标的坐标映射关系; 所述车辆位置标识模块,用于接收车辆的所述GPS坐标,根据所述坐标映射关系, 获取到所述车辆在所述监控画面中对应的所述二维坐标,根据所述二维坐标标识出所述车 辆的位置。 进一步地,所述控制点预设模块,还包括GPS坐标获取子模块和二维坐标获取子模 块; 所述GPS坐标获取子模块,用于获取所述控制点对应的所述GPS坐标; 所述二维坐标获取子模块,用于获取所述控制点在所述监控画面中的所述二维坐 标,具体为:采集所述控制点的图像,通过包括基于深度神经网络的图像识别和定位的开源 算法在内的图像训练方法,生成所述控制点的图像模型,建立图像模型库;根据所述图像模 型库中的所述图像模型,识别出所述监控画面中的所述控制点,获取所述控制点在所述监 控画面中的所述二维坐标。 进一步地,所述二维坐标获取子模块,进一步包括: 图像模型库建立单元,用于建立所述图像模型库,具体为:采集各个所述控制点的 图像,其中所述图像包括在不同天气,不同光线,不同角度,不同距离在内的不同条件下的 所述图像;针对采集的所述图像,进行包括对所述图像进行水平和垂直翻转、随机裁剪、随 5 CN 111597954 A 说 明 书 3/10 页 机角度旋转、改变图像对比度和亮度在内的预处理;针对采集的所述图像,标注所述图像对 应的所述控制点的类别和位置,形成所述图像相匹配的标注数据,并且同时建立训练文件 库,将所述标准数据放置于所述训练文件库中;建立对所述图像进行训练所需要的配置文 件,通过包括YOLO算法在内的基于深度神经网络的图像识别和定位的开源算法,对所述图 像进行训练,生成所述图像模型库。 相对位置和角度计算单元,计算所述相对位置和角度标准,具体为:当所有的所述 控制点识别无误后,计算所述监控画面中任意两个所述控制点的所述二维坐标之间的相对 位置和角度作为所述控制点之间的相对位置和角度标准;在后续识别所述控制点时,再次 计算所述控制点之间的相对位置和角度,与所述相对位置和角度标准进行对比,当所述控 制点之间的相对位置和角度与所述相对位置和角度标准中记录的值的偏差超过预设误差 值,则所述控制点识别错误。 进一步地,所述车辆位置标识模块,还包括: 图像处理子模块,用于针对所述监控视频做图像处理,在所述车辆在所述监控画 面中对应的所述二维坐标上,通过包括框图在内的方式,在所述监控画面中标识出所述车 辆的位置。 与现有技术相比,本发明包括以下至少一种有益效果是: (1)通过建立一种在监控视频中标识车辆位置的方法,具体包括:在监控视频的监 控区域中,预设若干个控制点,针对每一个所述控制点,同时获取所述控制点的GPS坐标和 所述控制点在监控画面中二维坐标;根据同一所述监控画面中的所述控制点的所述二维坐 标和所述GPS坐标,建立所述监控画面的所述二维坐标和所述GPS坐标的坐标映射关系;接 收车辆的所述GPS坐标,根据所述坐标映射关系,获取到所述车辆在所述监控画面中对应的 所述二维坐标,根据所述二维坐标标识出所述车辆的位置。能够将车辆的位置在监控画面 中标识出来,使得机场管理人员可以直接通过肉眼在监控画面中很清楚的查找到车辆的位 置。 (2)通过在生成所述图像模型库之后,当所有的所述控制点识别无误后,计算所述 监控画面中任意两个所述控制点的所述二维坐标之间的相对位置和角度作为所述控制点 之间的相对位置和角度标准。在后续识别所述控制点时,再次计算所述控制点之间的相对 位置和角度,与所述相对位置和角度标准进行对比,当所述控制点之间的相对位置和角度 与所述相对位置和角度标准中记录的值的偏差超过预设误差值,则所述控制点识别错误。 能够快速判断出控制点的识别是否准确,提高后续车辆位置标识的准确性。 (3)通过对所述监控视频做图像处理,在所述车辆在所述监控画面中对应的所述 二维坐标上,通过包括框图在内的方式,在所述监控画面中标识出所述车辆的位置。使得车 辆在监控画面中显示得更为清晰,能够一目了然的看到车辆的位置。 附图说明 图1为本发明一种在监控视频中标识车辆位置的方法的整体流程图; 图2为本发明一种在监控视频中标识车辆位置的系统的整体结构图; 图3为本发明一种在监控视频中标识车辆位置的系统中控制点预设模块的结构 图; 6 CN 111597954 A 说 明 书 4/10 页 图4为本发明一种在监控视频中标识车辆位置的系统中车辆位置标识模块的结构 图。











