
技术摘要:
公开了一种电子设备及控制该电子设备的方法。根据本公开的用于控制电子设备的方法包括以下步骤:检测至少一个用户并获取检测到的至少一个用户的用户信息;基于所获取的用户信息确定用户模式;通过将用户信息和所确定的用户模式作为输入数据输入到由人工智能算法学习的模 全部
背景技术:
与传统的基于规则的智能系统不同,人工智能(AI)系统是具有人类水平智能的计 算机系统,并且在这个系统中,机器自身训练、确定并变得智能。随着使用人工智能系统,识 别率得到提高,并且用户的偏好可以被更准确地理解,并且因此,传统的基于规则的智能系 统逐渐被基于深度学习的人工智能系统所取代。 人工智能技术由机器学习(如深度学习)和使用机器学习的基础技术组成。机器学 习是自分类/自训练输入数据的特征的算法技术,以及基础技术是使用机器学习算法(诸如 深度学习)的技术,并且由语言理解、视觉理解、推理/预测、知识表示、操作控制等的技术领 域组成。 应用人工智能技术的各个领域如下。语言理解是识别人类的语言/字母并应用/处 理它的技术,并且包括自然语言处理、机器翻译、转换系统、问答、语音识别/合成等。视觉理 解是识别人类的视野中的对象并处理它的技术,并且包括对象识别、对象跟踪、图像搜索、 人类识别、场景理解、空间理解、图像改进等。推断/预测是识别信息并对其进行逻辑推断和 预测的技术,并且包括基于知识/可能性的推断、优化预测、基于偏好的计划、推荐等。知识 表示是执行将人类的实验信息自动处理成知识数据的技术,并且包括知识构建(数据生成/ 分类)、知识管理(数据应用)等。操作控制是控制车辆的自动驾驶或机器人的运动的技术, 并且包括运动控制(导航、碰撞或行进)、操纵控制(行为控制)等。 同时,最近已经开发了向用户提供各种服务的电子设备。然而,这种电子设备仅在 特定状况下仅仅提供服务,或者仅提供用户命令的服务,并且在用户命令之前,电子设备不 确定和提供用户期望的服务。
技术实现要素:
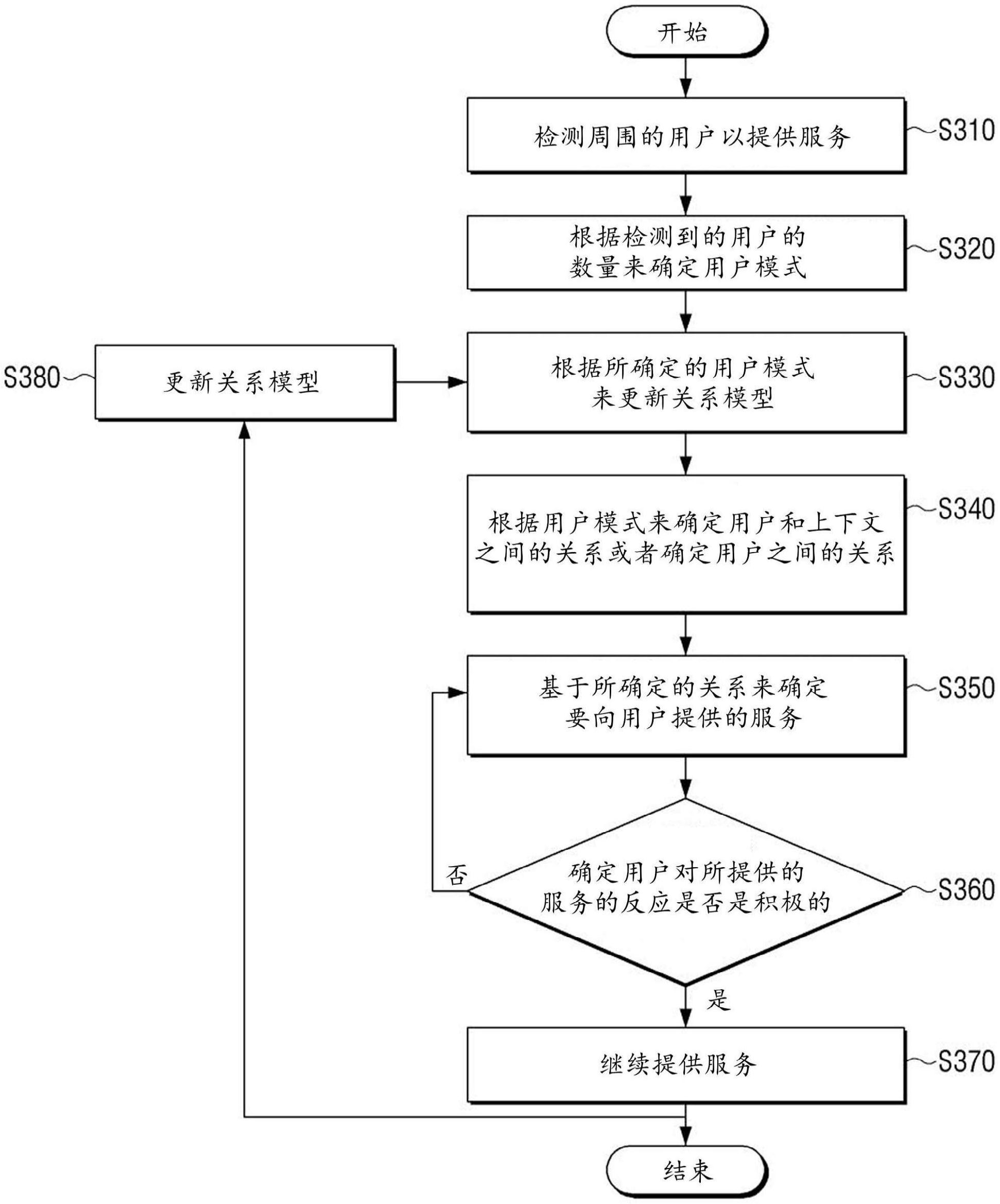
【技术问题】 已经做出了本公开以解决上述问题,并提供了一种电子设备及用于控制该电子设 备的方法,该电子设备通过在用于用户所需的服务的命令之前确定状况来预期/主动提供 服务。 此外,本公开涉及能够理解多个用户之间的关系并提供适合于多个用户的服务的 电子设备。 【技术方案】 4 CN 111602382 A 说 明 书 2/18 页 提供了一种用于使用人工智能神经网络模型控制电子设备的方法来实现上述目 的,该方法包括:通过检测至少一个用户来确定用户模式,获取检测到的至少一个用户的用 户信息,基于所确定的用户模式和用户信息来确定要提供给检测到的至少一个用户的服 务,以及提供与用户模式相对应的所确定的服务。 用户模式可以是第一用户模式和第二用户模式中的任何一个,并且第一用户模式 可以是针对一个检测到的用户的用户模式,以及第二用户模式可以是针对多个检测到的用 户的用户模式。 基于用户模式是第一用户模式,确定服务可以包括:通过将单个用户的信息、单个 用户周围的对象的信息和单个用户周围的状况的信息中的至少一个作为输入数据输入到 通过使用人工智能神经网络模型训练的模型来确定服务。 控制方法还可以包括,基于用户模式是第一用户模式,基于单个用户的信息、单个 用户周围的对象的信息和单个用户周围的状况的信息中的至少一个来预测检测到的用户 的下一个行为,并且确定服务包括:基于所预测的用户的下一个行为来确定服务。 基于用户模式是第二用户模式,确定服务还可以包括:确定多个用户之间的亲密 程度,并且基于所确定的亲密程度来确定服务。 提供服务还可以包括:确定至少一个用户对服务的反应,并且基于至少一个用户 的反应是积极的,向用户提供服务,并且基于至少一个用户的反应是消极的,通过将所检测 的至少一个用户的信息、所确定的用户模式和所确定的服务的信息作为输入数据应用于数 据识别模型,来确定要提供给检测到的至少一个用户的另一服务。 该控制方法还可以包括:用关于提供给用户的服务的信息作为学习数据来更新训 练模型。 该控制方法还可以包括,基于电子设备是人形机器人,基于检测到的至少一个用 户的注视(gaze)信息来确定机器人的注视。 提供了一种使用人工智能神经网络模型的电子设备来实现上述目的,该设备包 括:输入单元、输出单元和处理器,该处理器被配置为:通过检测至少一个用户来确定用户 模式,获取检测到的至少一个用户的用户信息,并基于所确定的用户模式和用户信息来确 定要提供给检测到的至少一个用户的服务,其中,该处理器被配置为控制输出单元来提供 与用户模式相对应的所确定的服务。 用户模式可以是第一用户模式和第二用户模式中的任何一个,并且第一用户模式 可以是针对一个检测到的用户的用户模式,以及第二用户模式可以是针对多个检测到的用 户的用户模式。 基于用户模式是第一用户模式,处理器可以被配置为:通过将单个用户的信息、单 个用户周围的对象的信息和单个用户周围的状况的信息中的至少一个作为输入数据输入 到通过使用人工智能神经网络模型训练的模型来确定服务。 处理器可以被配置为:基于用户模式是第一用户模式,基于单个用户的信息、单个 用户周围的对象的信息和单个用户周围的状况的信息中的至少一个来预测检测到的用户 的下一个行为,并且基于所预测的用户的下一个行为来确定服务。 基于用户模式是第二用户模式,处理器可以被配置为:确定多个用户之间的亲密 程度,并且基于所确定的亲密程度来确定服务。 5 CN 111602382 A 说 明 书 3/18 页 处理器可以被配置为:确定至少一个用户对服务的反应,并且 基于至少一个用户的反应是积极的,向用户提供服务,并且基于至少一个用户的 反应是消极的,通过将所检测的至少一个用户的信息、所确定的用户模式和所确定的服务 的信息作为输入数据应用于数据识别模型,来确定要提供给检测到的至少一个用户的另一 服务。 处理器可以被配置为:用关于提供给用户的服务的信息作为学习数据来更新训练 的模型。 基于电子设备是人形机器人,处理器可以被配置为:基于检测到的至少一个用户 的注视信息来确定机器人的注视。 提供了一种包括用于控制电子设备的程序的计算机可读记录介质以实现上述目 的,其中,用于控制电子设备的方法包括:检测至少一个用户并确定用户模式;获取检测到 的至少一个用户的用户信息;基于所确定的用户模式和用户信息,确定要提供给检测到的 至少一个用户的服务;以及提供与用户模式相对应的所确定的服务。 【发明效果】 根据上述的本公开的实施例,电子设备可以检测电子设备周围的用户,并根据检 测到的用户提供各种服务。 附图说明 图1是示出根据实施例的电子设备的配置的框图。 图2是具体示出根据实施例的电子设备的配置的框图。 图3是用于解释根据实施例的用于提供电子设备的服务的方法的流程图。 图4是用于解释根据实施例的用于在第一用户模式下的电子设备的操作的流程 图。 图5是用于解释根据实施例的用于提供在第一用户模式下的电子设备的服务的方 法的示例图。 图6是用于解释根据实施例的用于在第二用户模式下的电子设备100的操作的流 程图。 图7是用于解释根据实施例的用于提供在第二用户模式下的电子设备的服务的方 法的示例图。 图8至图11是用于解释根据实施例的使用学习算法生成数据识别模型、使用数据 识别模型针对用户数据执行聚类、以及针对用户数据确定机器人的运动的方法的示例性视 图。 图12是用于解释根据实施例的用于控制电子设备的方法的流程图。











