
技术摘要:
本发明公开了一种大兆瓦双馈式风电机组反向驱动方法,该方法为:变流器控制单元控制发电机定子绕组线端与机组并网端断开,且处于短路状态,转子绕组线端与机组并网端正常连接;控制单元接收主控系统设定的叶轮位置目标值,同时采集当前叶轮位置测量值,结合发电机齿轮 全部
背景技术:
双馈式风电机组安装及运维中,叶轮锁定、单叶片安装及更换均需要对风电机组 传动链反向施加驱动力,已到达所需的叶轮位置。对于日常运维前需要进行的叶轮锁定,目 前常用的方式有两种: (1)叶轮驱动方式该方式至少需要两人配合操作,其中第一个人在机舱内控制机 组液压刹车并使变桨系统小角度开桨,第二个人观察叶轮盘上锁孔与锁定销位置,当叶轮 盘上锁孔与锁定销位置对正后,第二个人通知第一个人操纵液压刹车锁定传动链,然后才 能将锁定销插入锁孔,完成叶轮锁定。 (2)独立驱动源驱动方式该方式与叶轮驱动方式操作过程类似,只是驱动源由叶 片小角度开桨改为安装独立的驱动电动机。 对于单叶片安装及更换,则必须要在传动链上安装一个独立的电动机作为驱动 源,由人工操作电动机启停,以到达叶片安装所需的叶轮位置。 但随着风电机组单机功率的增大,叶轮直径也相应增加,导致整个传动链转动惯 量的大幅增加。如对于叶轮位置调整工作来说,由于传动链转动惯量增大,液压刹车从启动 到完成刹车需要一定的时间。因此,驱动源在人工启停控制上,需精准把握好提前量,否则 很难达到叶轮所需的精确位置。在实际操作中,往往需要很长时间的反复尝试,才能完成该 项工作,费时费力且技术含量低,从而造成运维效率低、耗时长,在单机功率较大的机组上 尤为明显。 由此可见,上述现有的大兆瓦风电机组反向驱动方法显然仍存在有不便与缺陷, 而亟待加以进一步改进。如何能创设一种新的大兆瓦双馈式风电机组反向驱动方法及系 统,使其无需安装独立的盘车系统即可简单方便的实现叶轮反向驱动,较现有盘车技术更 加精准、高效,成为当前业界极需改进的目标。
技术实现要素:
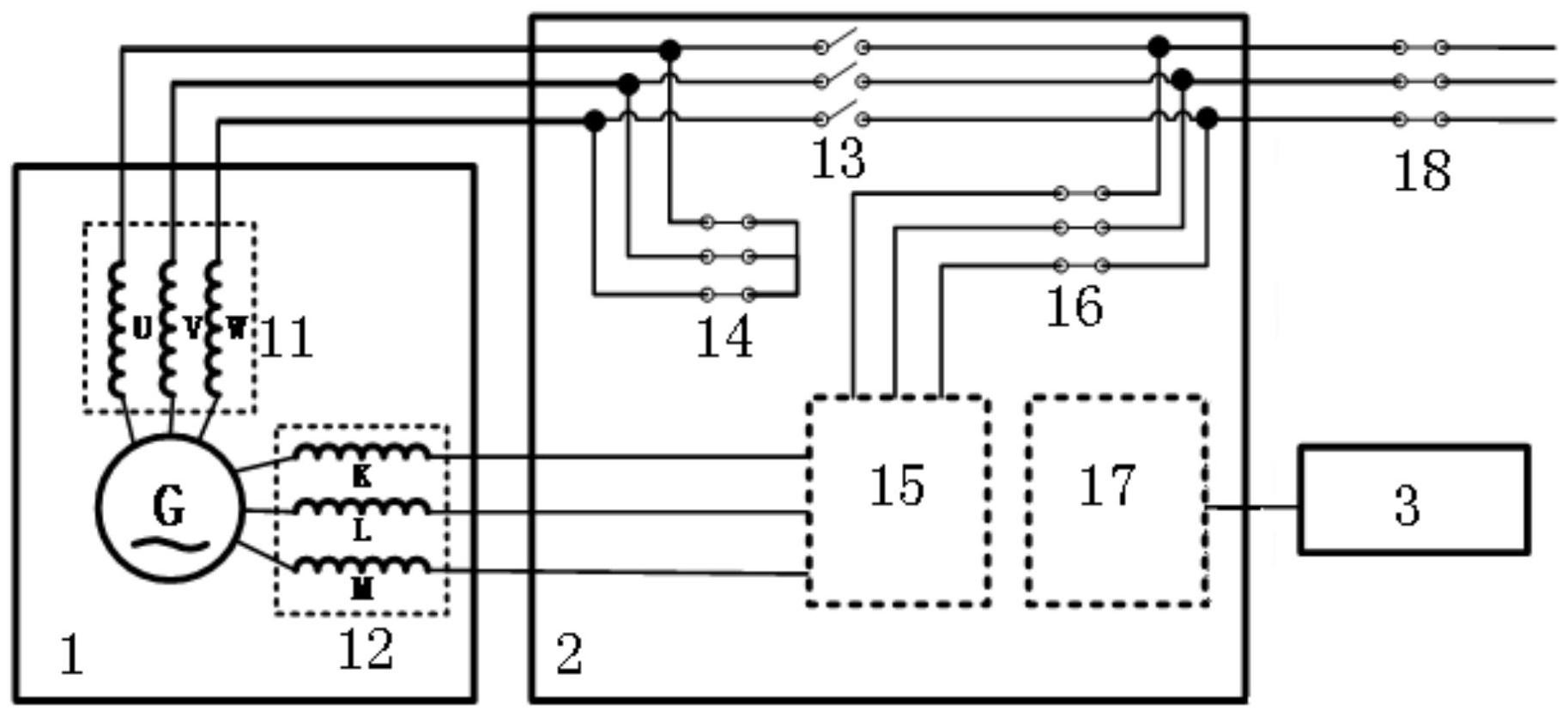
本发明要解决的技术问题是提供一种大兆瓦双馈式风电机组反向驱动方法,使其 无需安装独立的盘车系统即可简单方便的实现叶轮反向驱动,较现有盘车技术更加精准、 高效,从而克服现有的盘车方式的不足。 为解决上述技术问题,本发明提供一种大兆瓦双馈式风电机组反向驱动方法,所 述方法用于风电机组处于维护状态且需要盘车时,由风电机组主控系统控制变流器控制单 元切换为反向驱动模式,所述反向驱动模式的反向驱动方法包括如下步骤: (1)所述变流器控制单元控制发电机定子绕组线端与机组并网端断开,且处于短 路状态,并控制发电机转子绕组线端与机组并网端正常闭合连接; 3 CN 111594383 A 说 明 书 2/4 页 (2)所述变流器控制单元接收风电机组主控系统设定的叶轮位置目标值α,同时通 过叶轮位置传感器采集当前叶轮的叶轮位置测量值β; (3)所述变流器控制单元根据所述叶轮位置目标值α、叶轮位置测量值β以及风电 机组发电机的齿轮箱传动比k,计算得出所述发电机所需旋转的理论圈数n; (4)根据计算得出的发电机所需旋转理论圈数n值,所述变流器控制单元通过整 流/逆变模块驱动所述发电机以电动机模式启动,再根据所述叶轮位置目标值α和叶轮位置 测量值β调整所述发电机的转速,实现风电机组反向驱动。 进一步改进,还包括步骤(5):在叶轮反向驱动达到设定目标值时,所述变流器控 制单元向所述风电机组主控系统发送信号,由所述风电机组主控系统启动液压刹车,固定 叶轮位置。 进一步改进,还包括步骤(6):在所述风电机组主控系统控制的刹车动作完成后, 向所述变流器控制单元发送信号,所述变流器控制单元控制所述整流/逆变模块完成卸负 载,使发电机转子绕组上电压、电流归零,然后控制发电机转子绕组线端与机组并网端之 间,以及发电机定子绕组线端的短路状态均处于切断状态,即完成整个反向驱动工作。 进一步改进,所述叶轮位置传感器采用绝对位置编码器。 进一步改进,所述叶轮位置传感器安装在风电机组与轮毂连接的主轴法兰盘附 近,安装时标定所述法兰盘的圆周0度位置,所述叶轮位置传感器随主轴转动时,实时测量 所述叶轮的圆周位置角,即得所述叶轮位置测量值β。 本发明还提供一种大兆瓦双馈式风电机组反向驱动系统,包括发电机、双馈式变 流器和叶轮位置传感器, 所述双馈式变流器中包括设置在发电机定子绕组线端上的定子接触器和短路开 关,以及设置在发电机转子绕组线端上的整流/逆变模块和转子接触器,所述定子接触器和 短路开关并联设置,所述整流/逆变模块和转子接触器串联设置; 所述叶轮位置传感器,用于采集叶轮位置角; 所述双馈式变流器中还包括与风电机组主控系统连接的控制单元,所述控制单元 接收所述风电机组主控系统的指令,控制所述定子接触器、短路开关、转子接触器的开合, 并根据所述叶轮位置传感器采集的叶轮位置角和风电机组主控系统设定的叶轮位置目标 值,通过所述整流/逆变模块驱动发电机以电动机模式启动,控制发电机转速,实现风电机 组反向驱动。 进一步改进,所述叶轮位置传感器采用绝对位置编码器,其设置在风电机组与轮 毂连接的主轴法兰盘附近。 采用这样的设计后,本发明至少具有以下优点: 本发明大兆瓦双馈式风电机组反向驱动方法通过对现有双馈式发电机变流器进 行改进,结合叶轮位置检测,实现驱动发电机以电动机模式启动的功能,达到针对双馈式风 电机组传动链的反向驱动的技术效果,以利于双馈式风电机组的机组盘车、单叶片吊装和 叶片更换,方法简单可靠,省时省力,较现有的人工盘车方式更加经济、高效且精准。 本发明大兆瓦双馈式风电机组反向驱动系统通过在现有双馈式发电机变流器中 增加短路开关,并在风电机组与轮毂连接的主轴法兰盘附近安装叶轮位置传感器,则该双 馈式变流器、叶轮位置传感器与双馈式发电机形成闭环控制的伺服系统,实现发电机的反 4 CN 111594383 A 说 明 书 3/4 页 向驱动,达到精准控制叶轮盘车位置,既节省了现有机组高速轴端的盘车驱动接口成本和 预留的安装空间;又避免了机组维护时,独立盘车系统运送、安装调试等问题,结构简单,成 本低,精准可靠。 附图说明 上述仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,以下 结合附图与











