
技术摘要:
本发明公开了一种无人驾驶车辆的局部路径规划方法、装置、设备及介质,属于自动驾驶领域。该局部路径规划方法包括:获取车辆行驶的道路信息;采集所述车辆的预设范围内的障碍物信息;根据所述障碍物信息确定是否存在所述障碍物;若存在所述障碍物,则根据所述道路信息 全部
背景技术:
无人驾驶车辆是通过车载传感器系统感知周围环境,自动规划行驶路线并控制车 辆到达目标位置的智能汽车。对于无人驾驶车辆来说,路径规划决定了车辆的行车效率、舒 适性与安全性。路径规划可分为全局路径规划与局部路径规划,其中,局部路径规划是在环 境信息完全未知或部分未知时,侧重于考虑避障能力,规划过程中需要搜集环境数据。 现有的局部路径规划方案中,通常先根据高精地图生成多条初始路径,然后考虑 实际路径中障碍物的情况,再从多条初始路径中筛选出需要的路径,不仅规划的计算量较 大,生成的多条初始路径中也存在有障碍物的路径,既不符合实际驾驶的情况,也影响行车 效率和行车舒适性。
技术实现要素:
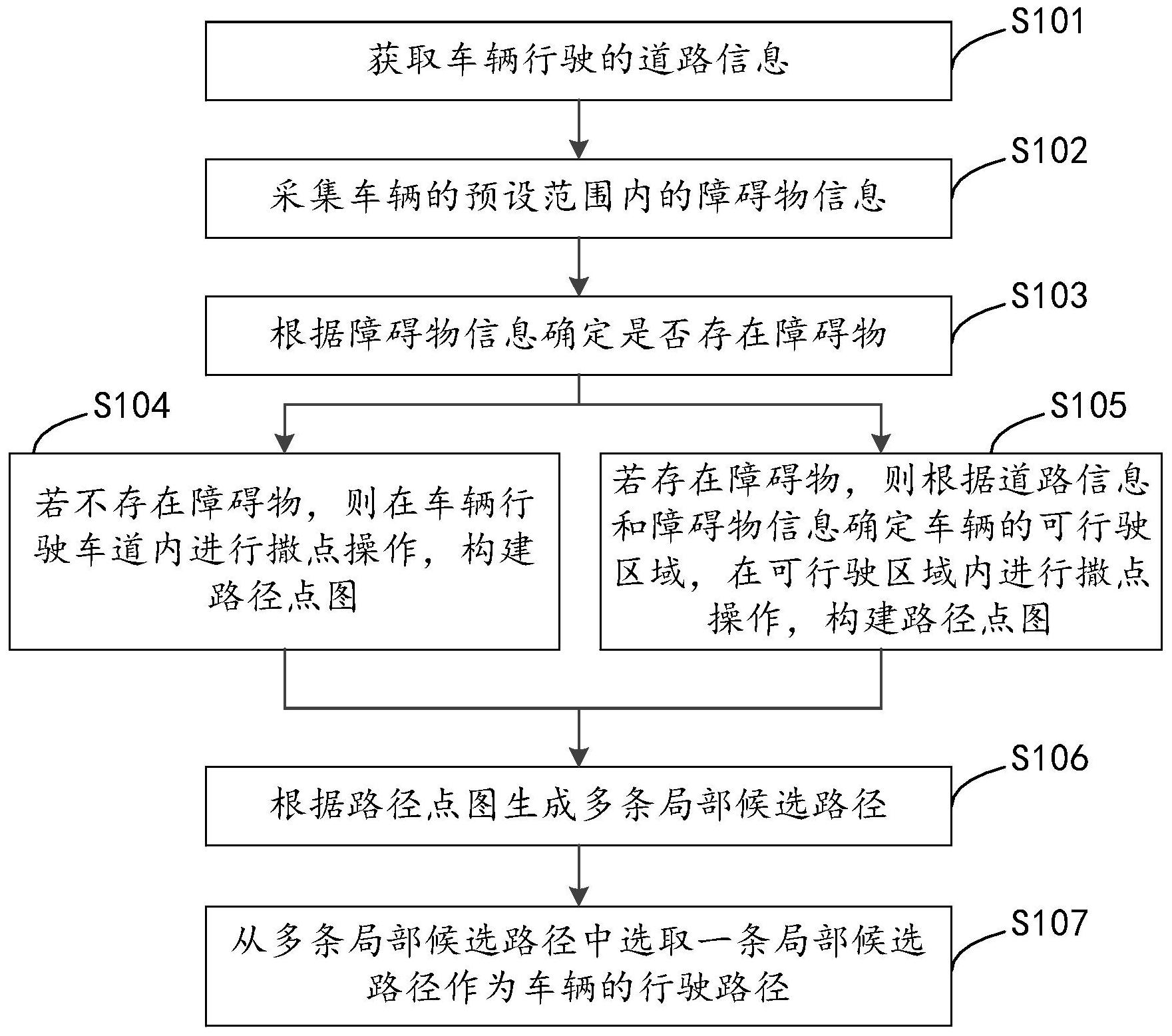
本发明的目的在于提供一种无人驾驶车辆的局部路径规划方法、装置、设备及介 质,用于解决现有技术中局部路径规划没有考虑障碍物信息,不符合实际驾驶情况,影响行 车效率和行车舒适性的问题。 为了达到所述目的,本发明采用的技术方案是: 一方面,本发明实施例提供了一种无人驾驶车辆的局部路径规划方法,所述局部 路径规划方法包括: 获取车辆行驶的道路信息; 采集所述车辆的预设范围内的障碍物信息; 根据所述障碍物信息确定是否存在所述障碍物; 若存在所述障碍物,则根据所述道路信息和所述障碍物信息确定所述车辆的可行 驶区域,在所述可行驶区域内进行撒点操作,构建路径点图; 根据所述路径点图生成多条局部候选路径; 从所述多条局部候选路径中选取一条所述局部候选路径作为所述车辆的行驶路 径。 另一方面,本发明实施例还提供了一种无人驾驶车辆的局部路径规划装置,所述 局部路径规划装置包括: 第一采集模块,用于获取车辆行驶的道路信息; 第二采集模块,用于采集所述车辆的预设范围内的障碍物信息; 障碍物确定模块,用于根据所述障碍物信息确定是否存在所述障碍物; 第一规划模块,用于当存在所述障碍物时,根据所述道路信息和所述障碍物信息 确定所述车辆的可行驶区域,在所述可行驶区域内进行撒点操作,构建路径点图; 4 CN 111552284 A 说 明 书 2/8 页 路径生成模块,用于根据所述路径点图生成多条局部候选路径; 路径选取模块,用于从所述多条局部候选路径中选取一条所述局部候选路径作为 所述车辆的行驶路径。 另一方面,本发明实施例还提供了一种无人驾驶设备,包括处理器和存储器,所述 存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由所述 处理器加载并执行以实现上述的局部路径规划方法。 另一方面,本发明实施例还提供了一种计算机存储介质,所述计算机存储介质中 存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由处理器加载并 执行以实现上述的局部路径规划方法。 本发明的技术方案带来的有益效果是: 在路径的动态规划过程中增加对障碍物的判断,选取无障碍物的区域进行撒点操 作,所生成的多条局部候选路径为无障碍物的局部候选路径,生成的可行驶路径的效率更 高,更符合实际的驾驶情况,提高行车效率和行车舒适性。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本发明一个实施例提供的无人驾驶车辆的局部路径规划方法的流程图。 图2是本发明一个实施例提供的无障碍物时的路径点图示意图。 图3是本发明一个实施例提供的有障碍物时的车辆行驶车道场景示意图。 图4是本发明一个实施例提供的根据障碍物的速度确定可行驶区域的流程图。 图5是本发明一个实施例提供的根据第一区域的宽度确定可行驶区域的流程图。 图6是本发明一个实施例提供的有障碍物时的路径点图示意图。 图7是本发明另一个实施例提供的有障碍物时的路径点图示意图。 图8是本发明一个实施例提供的无人驾驶车辆的局部路径规划装置的结构示意 图。











