
技术摘要:
本发明实施例公开了一种基于LiDAR和InSAR技术的河道行洪风险点识别方法、装置、服务器及存储介质,其中,所述方法包括:获取河堤LiDAR数据、河堤InSAR数据;将所述河堤LiDAR数据、河堤InSAR数据进行融合计算,以得到融合后的河堤高程预测值;根据所述河堤高程预测值来 全部
背景技术:
作为世界上最早广为采用的一种重要防洪工程,河道堤防是抵御洪涝灾害的重要 工程措施,是防洪工程建设的基础,是人民生命财产的重要保障。 随着卫星遥感技术的发展,作为变形监测重要手段的InSAR监测技术逐渐走向成 熟和应用,在地震监测、地表各类地物沉降监测中得到了重视和应用。它通过采用同一区域 长时间序列的SAR影像识别永久散射体,利用大气影响、形变等不同信息源的特性开展时间 序列分析来获取精确到mm级尺度的变形信息。 合成孔径雷达干涉技术(Interferometric Synthetic Aperture Radar,InSAR) 出现于20世纪60年代末,它是SAR与射电天文学干涉测量技术结合的产物。当扫过地面同一 目标区域时,利用成像几何关系,通过成像、一些特殊的数据处理和几何转换,即可提取地 表目标区域的高程信息和形变信息。由于InSAR技术有效利用了SAR的回波相位信息,测高 精度为米级甚至亚米级。 但是,二者还是存在一定问题,LiDAR测量存在一定误差,其误差源包括测距误差、 测角误差、定位误差、坐标转换误差、数据处理误差等。InSAR数据获取和处理过程中存在的 失相干、监测点识别、相位解缠等误差对工程化应用造成一定影响,尤其是线路长、周边环 境既有城市密集区又有农村的河堤工程的工程化应用。
技术实现要素:
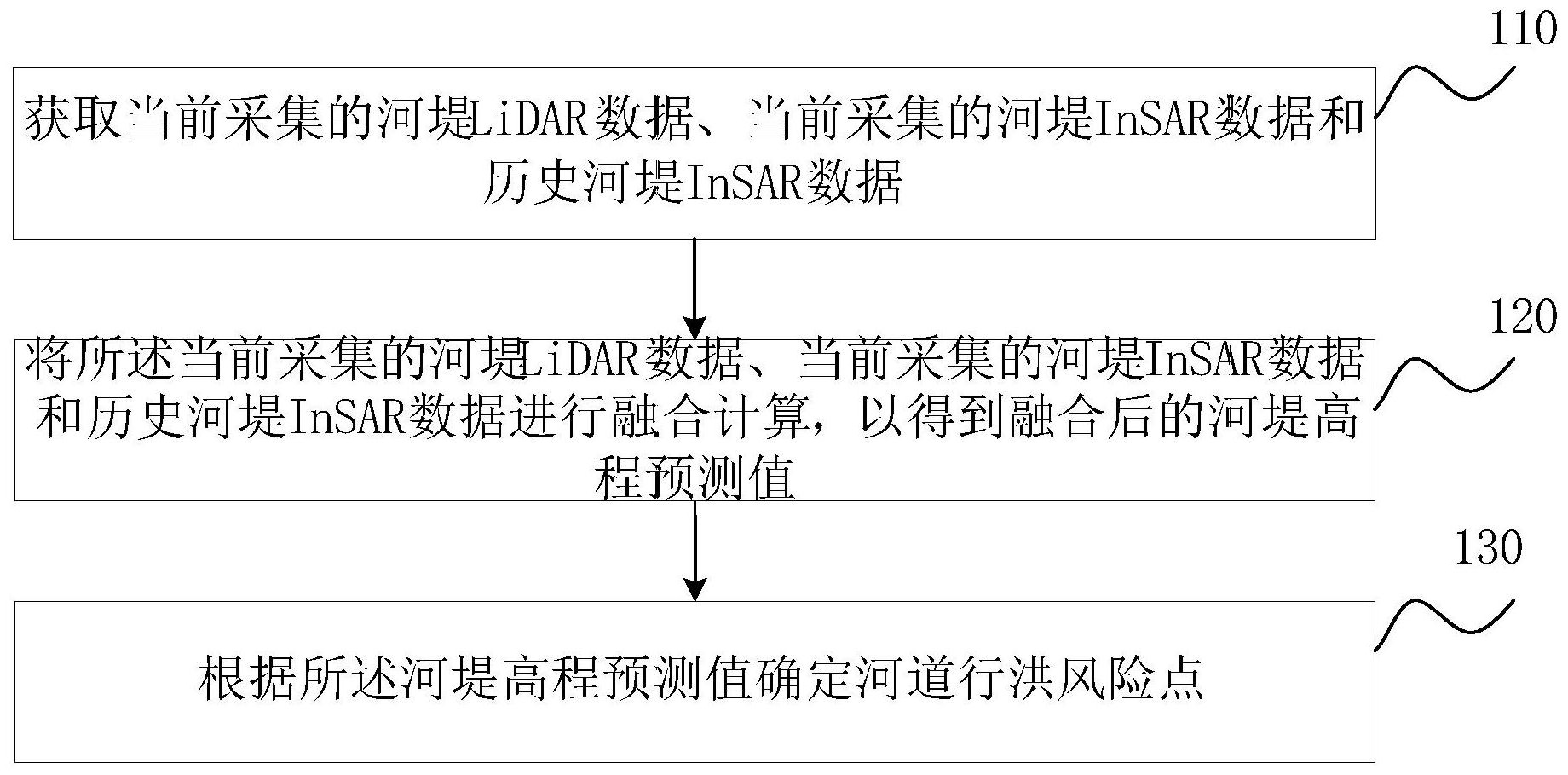
本发明实施例提供了一种基于LiDAR和InSAR技术的河道行洪风险点识别方法、装 置、服务器及存储介质,以解决现有技术中存在上述描述的技术问题。 第一方面,本发明实施例提供了一种基于LiDAR和InSAR技术的河道行洪风险点识 别方法,包括: 获取当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历史河堤InSAR数 据; 将所述当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历史河堤InSAR 数据进行融合计算,以得到融合后的河堤高程预测值; 根据所述河堤高程预测值确定河道行洪风险点。 进一步的,所述将所述当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和 历史河堤InSAR数据进行融合计算,包括: 建立多源数据与待融合结果之间的降质模型; 利用多源数据与待融合结果之间的降质模型进行融合计算。 4 CN 111611929 A 说 明 书 2/11 页 进一步的,所述利用建立多源数据与待融合结果之间的降质模型进行融合计算, 包括: 计算基于鲁棒性加权l1范数的数据; 根据所述基于鲁棒性加权l1范数的数据利用多源数据与待融合结果之间的降质 模型进行融合计算。 进一步的,所述根据所述基于鲁棒性加权l1范数的数据利用多源数据与待融合结 果之间的降质模型进行融合计算,包括: 建立基于坡度自适应的先验模型; 根据所述先验模型和基于鲁棒性加权l1范数的数据利用多源数据与待融合结果 之间的降质模型进行融合计算。 进一步的,所述将所述当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和 历史河堤InSAR数据进行融合计算,包括: 利用如下方式进行融合计算: yk=DkMku nk,其中,其中,u(HN1×HN2)表示待求的融合结果,而yk则表示投影在相 同坐标系下的多尺度数据集,大小为N1k×N2k。Mk是大小为HN1HN2×HN1HN2的运动矩阵,描述 的是在网格配准的过程中的平移量。 进一步的,所述计算基于鲁棒性加权l1范数的数据,包括: 利用如下公式计算: 更进一步的,所述根据所述河堤高程预测值确定河道行洪风险点包括: 根据堤防计算高程与实际堤防高程的差值确定河道行洪风险点。 第二方面,本发明实施例还提供了一种基于LiDAR和InSAR技术的河道行洪风险点 识别装置,包括: 获取模块,用于获取当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历 史河堤InSAR数据; 计算模块,用于将所述当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和 历史河堤InSAR数据进行融合计算,以得到融合后的河堤高程预测值; 确定模块,用于根据所述河堤高程预测值确定河道行洪风险点。 进一步的,所述计算模块包括: 模型建立单元,用于建立多源数据与待融合结果之间的降质模型; 融合计算单元,用于利用多源数据与待融合结果之间的降质模型进行融合计算。 进一步的,所述融合计算单元,包括: 计算一级子单元,用于计算基于鲁棒性加权l1范数的数据; 融合计算一级子单元,用于根据所述基于鲁棒性加权l1范数的数据利用多源数据 与待融合结果之间的降质模型进行融合计算。 进一步的,所述融合计算子单元包括: 计算二级子单元,用于计算基于鲁棒性加权l1范数的数据; 融合计算二级子单元,用于根据所述基于鲁棒性加权l1范数的数据利用多源数据 5 CN 111611929 A 说 明 书 3/11 页 与待融合结果之间的降质模型进行融合计算。 进一步的,所述获取模块用于: 利用如下方式进行融合计算: yk=DkMku nk,其中,其中,u(HN1×HN2)表示待求的融合结果,而yk则表示投影在相 同坐标系下的多尺度数据集,大小为N1k×N2k。Mk是大小为HN1HN2×HN1HN2的运动矩阵,描述 的是在网格配准的过程中的平移量。 进一步的,所述运算子单元用于: 利用如下公式计算: 更进一步的,所述确定模块用于: 根据堤防计算高程H计算与实际堤防高程H堤的差值确定河道行洪风险点。 第三方面,本发明实施例还提供了一种服务器,所述服务器包括: 一个或多个处理器; 存储装置,用于存储一个或多个程序, 当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理 器实现上述实施例提供的任一所述的基于LiDAR和InSAR技术的河道行洪风险点识别方法。 第四方面,本发明实施例还提供了一种包含计算机可执行指令的存储介质,所述 计算机可执行指令在由计算机处理器执行时用于执行如上述实施例提供的任一所述的基 于LiDAR和InSAR技术的河道行洪风险点识别方法。 本发明实施例提供的基于LiDAR和InSAR技术的河道行洪风险点识别方法、装置、 服务器及存储介质,通过获取当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历 史河堤InSAR数据;将所述当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历史河 堤InSAR数据进行融合计算,以得到融合后的河堤高程预测值;根据所述河堤高程预测值确 定河道行洪风险点。可以利用当前采集的河堤LiDAR数据、当前采集的河堤InSAR数据和历 史河堤InSAR数据进行正则变分框架融合,以得到融合结果,根据融合结果可以计算得到河 堤高程预测值。有效的避免了各种测量误差所产生的影响。提高了测量精度和风险识别精 度。 附图说明 通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本发明的其它 特征、目的和优点将会变得更明显: 图1是本发明实施例一提供的基于LiDAR和InSAR技术的河道行洪风险点识别方法 的流程示意图; 图2是本发明实施例一提供的基于LiDAR和InSAR技术的河道行洪风险点识别方法 中多源DEM数据集网格配准关系的示意图; 图3是本发明实施例二提供的基于LiDAR和InSAR技术的河道行洪风险点识别方法 的流程示意图; 图4是本发明实施例三提供的基于LiDAR和InSAR技术的河道行洪风险点识别方法 6 CN 111611929 A 说 明 书 4/11 页 的流程示意图; 图5是本发明实施例四提供的基于LiDAR和InSAR技术的河道行洪风险点识别装置 的结构示意图; 图6是本发明实施例五提供的服务器的结构示意图。











