
技术摘要:
本发明提供一种基于光照一致的车位线检测方法,包括采用滤波对图像进行去噪;使用四向敏感滤波器对图像进行处理,并提取得到各像素点的光照一致特征;根据光照一致特征对每个像素点进行二值化处理,得到多个连通区域;对图像进行开运算处理,同时得到多个连通区域开运 全部
背景技术:
随着科技的飞速发展,自动驾驶技术已经成为人工智能领域的研究热点,智能泊 车科技配置变得越来越普及,汽车上开始装配了许多高科技的产品,自动泊车系统就是其 中之一。自动泊车系统可以在一定程度上提高停车的便捷性,尤其对于那些停车概念比较 模糊和有心里恐惧的司机,还可以有效缓解和解决停车难问题,从而缩短泊车时间,进一步 提高交通网络效率。 在建立一个自动泊车系统时,有许多关键问题需要解决,如何快速、准确地检测和 定位车辆周围的停车位,就是其中之一。检测车位所用的传感器主要有视觉传感器和测距 传感器。 传统的自动泊车系统方案中,车位感知主要通过超声波雷达进行,相邻的车辆可 以很容易地被识别出来。由于超声波雷达的工作原理的局限性,即在没有相邻车辆的情况 下,无法找到空闲的停车位,其准确性取决于相邻车辆的位置,对于车位场景的适应性较 差。 与此相比,基于多视觉传感器的方法能够更准确地识别停车位,因为其识别过程 不依赖于相邻车辆的存在。近年来,随着对自动泊车系统需求的快速增长,已经提出了多种 基于多视觉传感器的车位线检测方法,然而之前的方法大多没有考虑到不同光照条件对于 车位线检测的影响,本发明的车位线检测方法致力于解决不同光照条件下的车位线识别问 题。
技术实现要素:
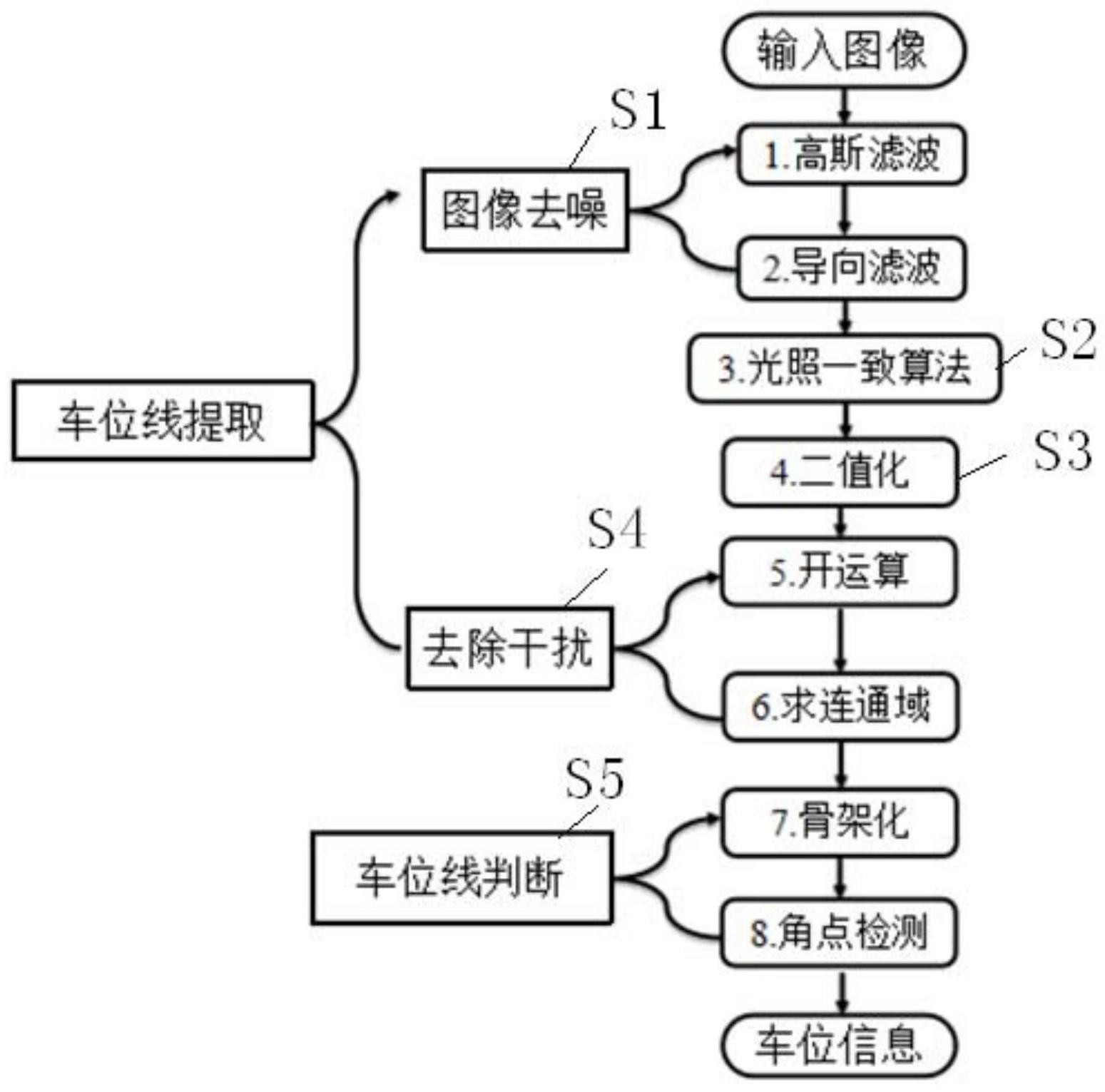
本发明的目的在于提供一种基于光照一致的车位线检测方法,以将光照一致特征 引入到停车场的车位线检测系统中,以期望达到较高的车位线检测准确率。 为了实现上述目的,本发明提供一种基于光照一致的车位线检测方法,包括: S1:采用滤波对待测图像进行去噪; S2:使用四向敏感滤波器对去噪处理后的待测图像进行处理,并提取得到待测图 像的各个像素点的光照一致特征; S3:根据所述光照一致特征ζu对待测图像的每个像素点进行二值化处理,得到多 个连通区域; S4:对待测图像进行开运算处理,同时计算得到多个连通区域开运算结果,并将大 于最大的连通区域的面积的60%的连通区域开运算结果予以保留。 在所述步骤S1中,所采用的滤波包括高斯滤波和导向滤波。 所述步骤S2包括: 步骤S21:计算去燥处理后的待测图像中的每个像素点的四向敏感滤波器值沿4个 4 CN 111611930 A 说 明 书 2/8 页 不同方向的分量; 其中,第u个像素点的四向敏感滤波器值沿其中一个方向λ的分量为: 其中,Yv表示第v个像素点的灰度值,H表示第v个像素点的灰度值Yv的直方图;B是 直方图H的槽的个数,β∈(0,1)表示从第u个像素点到第v个像素点的下降因子,|u-v|是第u 个像素点和第v个像素点之间的空间距离;V(Yv,b)表示第v个像素点的灰度值分布函数,当 第v个像素点的灰度值Yv属于第b个槽时,V(Yv,b)的值为1,否则V(Yv,b)的值为0,b是一个在 1到维数B之间的整数; 步骤S22:根据每个像素点的四向敏感滤波器值沿4个不同方向的分量,将像素点 的权重进行累加,得到待测图像中的每个像素点在直方图H的各个槽上的四向敏感滤波器 值; 步骤S23:对所述每个像素点在直方图H的各个槽上的四向敏感滤波器值进行归一 化处理,得到各个像素点的归一化因子; 步骤S24:采用所述各个像素点的归一化因子获取第u个像素点和第v个像素点为 中心的两个局部区域之间的四向敏感滤波器差值; 步骤S25:提取光照一致特征; 在所述步骤S21中,所述第u个像素点的四向敏感滤波器值沿其中一个方向λ的分 量 采用积分直方图的方法,并在前一个像素点的基础上计算,第u个像素点的四向敏感 滤波器值沿其中一个方向λ的分量 为: 其中,β∈(0,1)为下降因子,V(Yv,b)表示第u个像素点的灰度值分布函数,第u个 像素点的灰度值Yu属于第b个槽时,V(Yu,b)的值为1,否则V(Yu,b)的值为0, 是第u-1 个像素点上的四向敏感滤波器值沿其中一个方向λ的分量; 在所述步骤S22中,第u个像素点在直方图H的第b个槽上的四向敏感滤波器值为: 其中,Gu(b)表示第u个像素点在直方图H的第b个槽上的四向敏感滤波器值, 是第u-1个像素点上的四向敏感滤波器值沿其中一个方向λ的分量;V(Yu,b)表示第u 个像素点的灰度值分布函数,当第u个像素点的灰度值Yu属于第b个槽时,V(Yu,b)的值为1, 否则V(Yu,b)的值为0。 在所述步骤S23中,第u个像素点的归一化因子mu为: 其中,mu为归一化因子,λ为方向,β∈(0,1)是一个控制参数。 所述步骤S24包括:采用所述归一化因子对各个像素点的四向敏感滤波器值进行 归一化,将归一化后的第u个像素点和第v个像素点在直方图H的第b个槽上的四向敏感滤波 5 CN 111611930 A 说 明 书 3/8 页 器值Gu和Gv的累计分布直方图的差值的总和作为第u个像素点和第v个像素点为中心的两个 局部区域之间的四向敏感滤波器差值。 所述步骤S25包括: 步骤S251:获取在仿射光照变换之前与之后的待测图像的像素点的灰度值的变换 公式; 步骤S252:将四向敏感滤波器值Gu在区间[bu-ru,bu ru]内的积分值作为仿射光照 变换之前的光照一致特征ζu,并计算仿射光照变换之后的光照一致特征ζ'u。 所述步骤S2还包括步骤S26:引入一个软性平滑项,以优化所述光照一致特征ζu。 在所述步骤S3中,在进行二值化处理时,所述连通区域为光照一致特征ζu高于一 阈值的像素点组成的连通区域。 在所述步骤S4中,所述多个连通区域采用广度优先的连通域求取算法计算得到。 本发明的基于光照一致的车位线检测方法还包括步骤S5:基于图像骨架化算法进 行车位线的角点检测。 本发明的基于光照一致的车位线检测方法通过采用一维的四向敏感滤波器,从像 素的四个方向计算邻域像素的贡献值,从而将光照一致特征应用于车位线检测,以去除光 照对原图像的影响,并通过对图像进行二值化处理,以进一步减少不同光照条件下对于车 位线检测的影响,最大限度的将图像中感兴趣的部分保留下来,从而实现了不同光照条件 下车位线的准确保留。此外,本发明通过采用开运算来排除图像中特殊物体的干扰,同时计 算得到每个连通区域的面积,规定大于最大连通区域面积60%的予以保留,再基于图像骨 架化算法进行车位线的角点检测并进一步去除干扰,从而实现车位线的准确识别,达到更 高的准确率,因此,本发明的基于光照一致的车位线检测方法能在不同光照强度下较准确 地识别出有效车位。另外,本发明的基于光照一致的车位线检测方法首先用高斯滤波和导 向滤波对图像进行去噪,从而去除光照对原图像的影响。本发明的连通域利用了光照一致 特征,可以去除车位线中的杂点。 附图说明 图1为根据本发明的一个实施例的车位线检测方法的流程图。 图2A为如图1所示的车位线检测方法在步骤S4中的开运算结果示意图。 图2B为如图1所示的车位线检测方法在步骤S4中的将大于最大的连通区域的面积 的60%的连通区域开运算结果予以保留后的结果示意图。 图3A-图3B为本发明的车位线检测方法与传统的Hough方法的结果对比图,其中图 3A示出了传统的Hough方法的结果,图3B示出了本发明的车位线检测方法的结果。











