
技术摘要:
本发明提供的振动信号的控制方法、存储介质及电子设备,对于不同应用场景的各种期望振动频率和期望刹车时间,本发明通过预先设置相对应的期望振动频率和期望刹车时间,进而根据期望振动频率设置基础振动信号;接着将基础振动信号进行初次优化,优化后的基础振动信号所 全部
背景技术:
】 如今电子设备中加入了丰富且逼真的振动反馈,给用户带来了一定的触觉体验。 例如,模拟被柔软的皮球击打,电子设备需要一种低频的振动信号用来模拟实际触觉;模拟 被高速的子弹击中,电子设备需要一种高频的振动信号来模拟实际触觉。 决定用户的触觉体验感的因素为振动信号的时长、频率和强度,在实际应用中主 要为短暂的振动反馈,因此时长较短的振动信号的强度与频率成为主要的决定因素。目前 对于时长较短的振动信号,强度已经能够在较大范围内进行控制,强度已经实现了多样性。 但是在强度足够大的情况下,对于频率的控制还不能实现多样性,因此无法适配不同的应 用场景,无法满足用户丰富的触觉体验感需求。另外,为了及时进行高密度的振感切换,提 升触觉体验,每一振感的刹车时间也不宜过长。 【
技术实现要素:
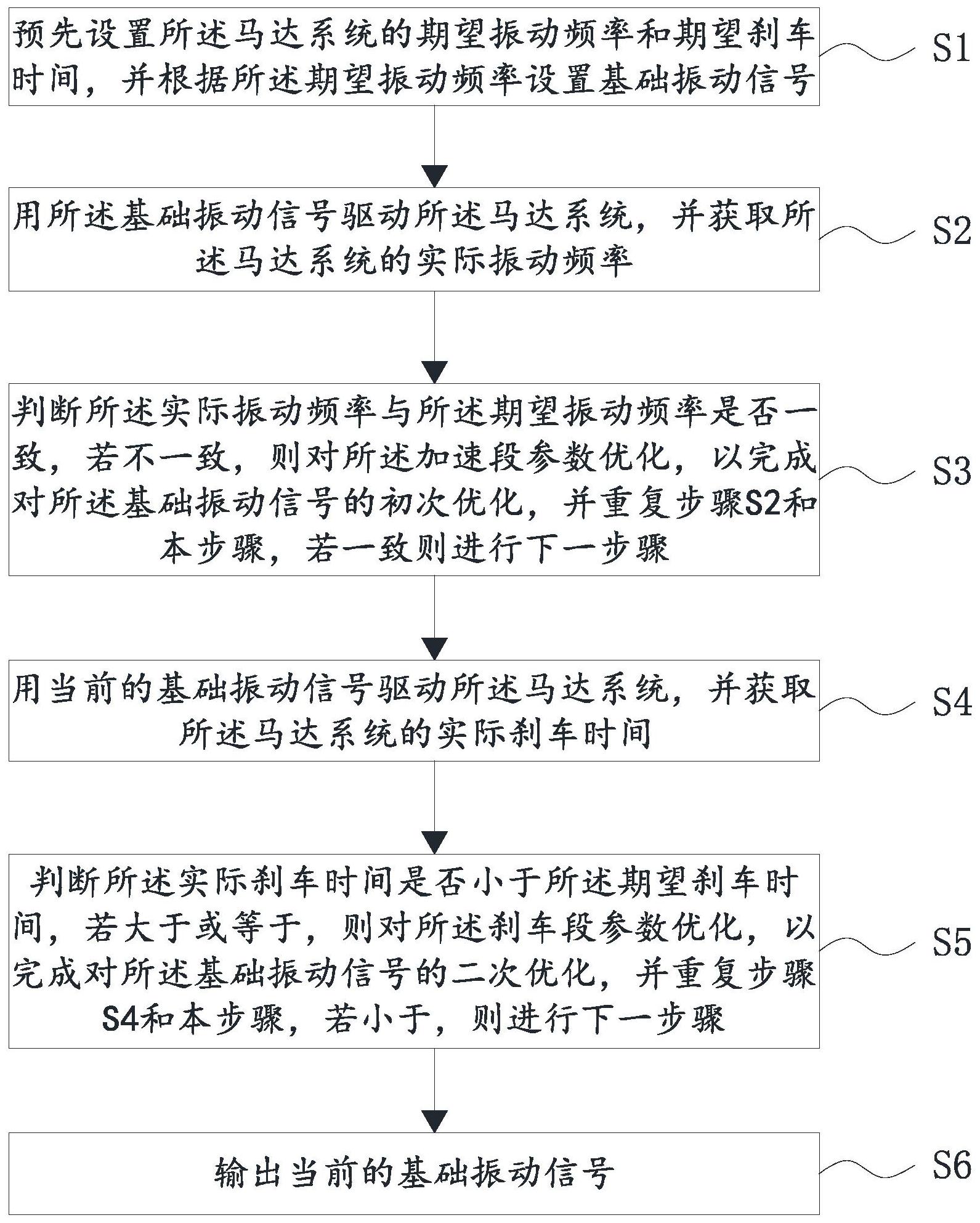
】 鉴于上述现有技术的不足,本发明的目的在于提供振动信号的控制方法、存储介 质及电子设备,旨在解决现有技术对于时长较短的振动信号的频率控制不具备多样性的问 题。 第一方面,本发明提供了一种振动信号的控制方法,所述振动信号用于驱动马达 系统振动,所述振动信号的控制方法包括: S1:预先设置所述马达系统的期望振动频率和期望刹车时间,并根据所述期望振 动频率设置基础振动信号,所述基础振动信号的参数包括加速段参数和刹车段参数,所述 加速段参数对应于驱动所述马达系统振动加速,所述刹车段参数对应于驱动所述马达系统 振动减速; S2:用所述基础振动信号驱动所述马达系统,并获取所述马达系统的实际振动频 率; S3:判断所述实际振动频率与所述期望振动频率是否一致,若不一致,则对所述加 速段参数优化,以完成对所述基础振动信号的初次优化,并重复步骤S2和本步骤,若一致则 进行下一步骤; S4:用当前的基础振动信号驱动所述马达系统,并获取所述马达系统的实际刹车 时间; S5:判断所述实际刹车时间与所述期望刹车时间是否一致,若不一致,则对所述刹 车段参数优化,以完成对所述基础振动信号的二次优化,并重复步骤S4和本步骤,若一致, 则进行下一步骤; S6:输出当前的基础振动信号。 4 CN 111552369 A 说 明 书 2/7 页 进一步地,步骤S2具体包括: 将所述基础振动信号输入至马达系统,以使所述马达系统输出对应于所述基础振 动信号的第一振动信号; 将所述第一振动信号进行快速傅里叶变换计算,得到所述实际振动频率。 进一步地,所述加速段参数包括最小加速段时长,所述最小加速段时长表示一段 加速段的时长最小值,步骤S3包括: 若所述实际振动频率大于所述期望振动频率,则增大所述最小加速段时长;若所 述实际振动频率小于所述期望振动频率,则减小所述最小加速段时长。 再进一步地,所述加速段参数还包括加速段总数量和加速段总时长,所述加速段 总数量表示间隔设置的加速段的个数,所述加速段总时长表示所有加速段的时长总和最大 值,步骤S3还包括: 若所述实际振动频率大于所述期望振动频率,则减小加速段总数量;和/或,增大 加速段总时长; 若所述实际振动频率小于所述期望振动频率,则增大加速段总数量;和/或,减小 加速段总时长。 进一步地,步骤S4包括: 将所述已完成初次优化的基础振动信号输入至马达系统,以使所述马达系统输出 对应于所述已初次优化的基础振动信号的第二振动信号; 根据所述第二振动信号的持续衰减时间获取所述实际刹车时间。 进一步地,所述刹车段参数包括刹车段总数量,所述刹车段总数量表示间隔设置 的刹车段的个数,步骤S5包括: 若所述实际刹车时间大于所述期望刹车时间,则增大所述刹车段总数量。 进一步地,所述马达系统为马达的虚拟模型; 步骤S2具体为:将所述基础振动信号与所述虚拟模型的参数运算,获取所述虚拟 模型的实际振动频率; 步骤S4具体为:将所述初步优化振动信号与所述虚拟模型的参数运算,获取所述 虚拟模型的实际刹车时间。 进一步地,所述基础振动信号为电压信号。 第二方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上 存储有振动信号的控制程序,所述振动信号的控制程序被处理器运行时执行如第一方面所 述的振动信号的控制方法的步骤。 第三方面,本发明提供了一种电子设备,所述电子设备包括存储器、处理器以及存 储在所述存储器上并可在所述处理器上运行的振动信号的控制程序,所述振动信号的控制 程序被所述处理器执行时实现如第一方面所述的振动信号的控制方法的步骤。 有益效果:本发明提供的振动信号的控制方法中,对于不同应用场景的各种期望 振动频率和期望刹车时间,本发明通过预先设置相对应的期望振动频率和期望刹车时间, 进而根据期望振动频率设置基础振动信号;接着将基础振动信号进行初次优化,优化后的 基础振动信号所对应的频率即为该期望振动频率;接着将基础振动信号进行二次优化,优 化后的基础振动信号所对应的刹车时间将小于期望刹车时间;最后根据已完成优化的基础 5 CN 111552369 A 说 明 书 3/7 页 振动信号即可得到相对应的振动信号。相较于现有技术,本发明可以实现控制振动信号频 率的多样性,即实现了全频率控制,丰富了振动效果,且能达到预期的刹车效果。 【附图说明】 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下, 还可以根据这些附图获得其他的附图。 图1为本发明实施例1所提供的振动信号的控制方法的流程图; 图2为本发明实施例1中对基础振动信号进行初次优化的具体处理流程图; 图3为本发明实施例1中对基础振动信号进行二次优化的具体处理流程图; 图4为本发明实施例2所提供的电子设备的结构示意图。 【











