
技术摘要:
本发明涉及智能家居技术领域,公开了一种清洁机器人的分区边界扩展方法、装置、设备及存储介质,用于提高分区边界扩展的准确率。清洁机器人的分区边界扩展方法包括:在环境地图中建立预设分区;根据预设分区的分区边界确定预设分区清扫路径;当清洁机器人按照预设分区 全部
背景技术:
目前清洁机器人主要应用在分区清扫阶段,一般预先设置分区边界,再进行分区 清扫。而实际分区清扫的过程中,随着传感器数据更新,获取到更多的环境信息,检测到预 设分区边界设置不准确,导致清洁效率降低。此时需要重新修改分区边界,也就是向外部区 域增大预设分区的边界范围,一般将修改分区边界的过程定义为分区边界扩展。 在市面上已有的清洁机器人,一类清洁机器人不进行分区边界扩展,只是按照预 设置分区边界进行清洁,导致清洁效率低。另一类清洁机器人虽然进行分区边界扩展,但是 由于存在边界扩展场景限制,导致分区边界扩展准确率低和清洁效率低。
技术实现要素:
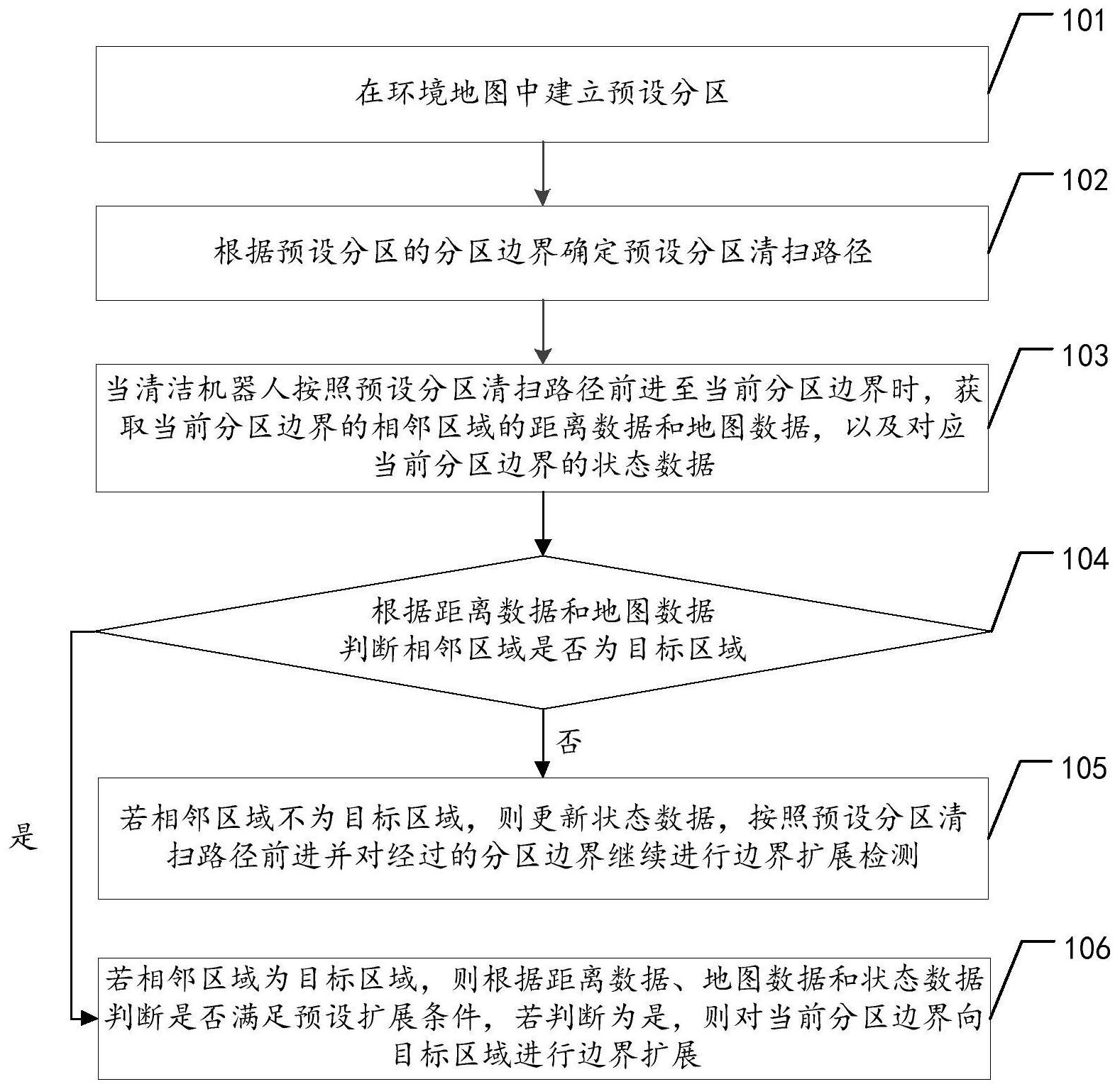
本发明的主要目的在于解决现有的清洁机器人存在边界扩展场景限制,导致分区 边界扩展准确率低和清洁效率低的问题。 为实现上述目的,本发明第一方面提供了一种清洁机器人的分区边界扩展方法, 包括:在环境地图中建立预设分区;根据预设分区的分区边界确定预设分区清扫路径;当清 洁机器人按照所述预设分区清扫路径前进至当前分区边界时,获取当前分区边界的相邻区 域的距离数据和地图数据,以及对应当前分区边界的状态数据;根据所述距离数据和所述 地图数据判断相邻区域是否为目标区域;若所述相邻区域不为目标区域,则更新所述状态 数据,按照所述预设分区清扫路径前进并对经过的分区边界继续进行边界扩展检测;若所 述相邻区域为目标区域,则根据所述距离数据、所述地图数据和所述状态数据判断是否满 足预设扩展条件,若判断为是,则对所述当前分区边界向所述目标区域进行边界扩展。 可选的,在本发明第一方面的第一种实现方式中,所述根据所述距离数据和所述 地图数据判断相邻区域是否为目标区域,包括:按照所述地图数据确定所述当前分区边界 对应的闭合范围,所述闭合范围即所述相邻区域中的障碍物和/或已清扫区域在所述分区 边界上的正投影所占据的区域范围;确定初始检测范围,根据所述距离数据、所述闭合范围 和所述初始检测范围判断所述相邻区域是否为目标区域。 可选的,在本发明第一方面的第二种实现方式中,所述距离数据、所述闭合范围和 所述初始检测范围判断所述相邻区域是否为目标区域,包括:对预设系数与所述初始检测 范围进行乘积运算,得到目标检测范围,所述预设系数为小于1的正数;判断所述闭合范围 是否大于或者等于所述目标检测范围;若所述闭合范围大于或者等于所述目标检测范围, 则确定所述相邻区域为闭合区域;若所述闭合范围小于所述目标检测范围,则确定所述相 邻区域为开放区域;若确定所述相邻区域为开放区域,或者确定所述相邻区域为闭合区域 且所述相邻区域中的障碍物和/或已清扫区域与所述当前分区边界的距离满足第一预设距 5 CN 111722630 A 说 明 书 2/13 页 离阈值,则确定所述相邻区域不是目标区域,并在所述状态数据中设置扩展标记为第二预 设值,以使得所述扩展标记用于指示终止同一分区边界上的边界扩展检测,所述扩展标记 的初始值为第一预设值,所述第一预设值与所述第二预设值不相同;若确定所述相邻区域 为闭合区域且所述相邻区域中的障碍物和/或已清扫区域与所述当前分区边界的距离满足 第二预设距离阈值,则确定所述相邻区域是目标区域。 可选的,在本发明第一方面的第三种实现方式中,所述若所述相邻区域为目标区 域,则根据所述距离数据、所述地图数据和所述状态数据判断是否满足预设扩展条件,包 括:若所述相邻区域为目标区域,则根据所述距离数据和所述地图数据判断所述相邻区域 是全闭合区域还是半闭合区域;若所述相邻区域是全闭合区域,则根据所述状态数据判断 所述全闭合区域是否满足预设扩展条件;若所述相邻区域是半闭合区域,则根据所述状态 数据判断所述半闭合区域是否满足预设扩展条件。 可选的,在本发明第一方面的第四种实现方式中,所述若所述相邻区域是全闭合 区域,则根据所述状态数据判断所述全闭合区域是否满足预设扩展条件,包括:若所述相邻 区域为全闭合区域,则获取所述状态数据中的已扩展边界范围,判断所述已扩展边界范围 是否小于预设临界值;若判断为是,则确定所述全闭合区域满足预设扩展条件,并对所述当 前分区边界向所述全闭合区域扩展;若判断为否,则确定所述全闭合区域不满足预设扩展 条件,并终止当前分区边界的边界扩展检测。 可选的,在本发明第一方面的第五种实现方式中,所述若所述相邻区域是半闭合 区域,则根据所述状态数据判断所述半闭合区域是否满足预设扩展条件,包括:若所述相邻 区域为所述半闭合区域,则获取所述状态数据中的起始边界标记和扩展标记,判断所述起 始边界标记和所述扩展标记是否分别不等于预设起始边界值和第二预设值,所述扩展标记 的初始值为第一预设值,所述第一预设值与所述第二预设值不同,所述第一预设值和所述 第二预设值分别用于对同一分区边界上的边界扩展检测和终止同一分区边界上的边界扩 展检测;若判断为是,则确定所述半闭合区域满足预设扩展条件,并对所述当前分区边界向 所述半闭合区域扩展;若判断为否,则确定所述半闭合区域不满足预设扩展条件,并终止当 前分区边界的边界扩展检测。 可选的,在本发明第一方面的第六种实现方式中,在所述若所述相邻区域为目标 区域,则根据所述距离数据、所述地图数据和所述状态数据判断是否满足预设扩展条件,若 判断为是,则对所述当前分区边界向所述目标区域进行边界扩展之后,所述清洁机器人的 分区边界扩展方法还包括:获取已清扫的分区区域或者已扩展的分区边界,并将所述已清 扫的分区区域或者所述已扩展的分区边界更新并标记到所述地图数据中,得到已更新的地 图数据;将所述已更新的地图数据发送到目标终端,以使得所述目标终端可视化显示所述 已更新的地图数据;当检测到所述预设分区被清扫完成时,则按照所述已更新的地图数据 查询待清扫的分区区域,并对所述待清扫的分区区域进行清扫和边界扩展。 本发明第二方面提供了一种清洁机器人的分区边界扩展装置,包括:建立模块,用 于在环境地图中建立预设分区;确定模块,用于根据预设分区的分区边界确定预设分区清 扫路径;获取模块,当清洁机器人按照所述预设分区清扫路径前进至当前分区边界时,用于 获取当前分区边界的相邻区域的距离数据和地图数据,以及对应当前分区边界的状态数 据;判断模块,用于根据所述距离数据和所述地图数据判断相邻区域是否为目标区域;处理 6 CN 111722630 A 说 明 书 3/13 页 模块,若所述相邻区域不为目标区域,则用于更新所述状态数据,按照所述预设分区清扫路 径前进并对经过的分区边界继续进行边界扩展检测;扩展模块,若所述相邻区域为闭合区 域,则根据所述距离数据、所述地图数据和所述状态数据判断是否满足预设扩展条件,若判 断为是,则对所述当前分区边界向所述目标区域进行边界扩展。 可选的,在本发明第二方面的第一种实现方式中,所述判断模块还包括:确定单 元,用于按照所述地图数据确定所述当前分区边界对应的闭合范围,所述闭合范围即所述 相邻区域中的障碍物和/或已清扫区域在所述分区边界上的正投影所占据的区域范围;判 断单元,用于确定初始检测范围,根据所述距离数据、所述闭合范围和所述初始检测范围判 断所述相邻区域是否为目标区域。 可选的,在本发明第二方面的第二种实现方式中,所述判断单元具体用于:对预设 系数与所述初始检测范围进行乘积运算,得到目标检测范围,所述预设系数为小于1的正 数;判断所述闭合范围是否大于或者等于所述目标检测范围;若所述闭合范围大于或者等 于所述目标检测范围,则确定所述相邻区域为闭合区域;若所述闭合范围小于所述目标检 测范围,则确定所述相邻区域为开放区域;若确定所述相邻区域为开放区域,或者确定所述 相邻区域为闭合区域且所述相邻区域中的障碍物和/或已清扫区域与所述当前分区边界的 距离满足第一预设距离阈值,则确定所述相邻区域不是目标区域,并在所述状态数据中设 置扩展标记为第二预设值,以使得所述扩展标记用于指示终止同一分区边界上的边界扩展 检测,所述扩展标记的初始值为第一预设值,所述第一预设值与所述第二预设值不相同;若 确定所述相邻区域为闭合区域且所述相邻区域中的障碍物和/或已清扫区域与所述当前分 区边界的距离满足第二预设距离阈值,则确定所述相邻区域是目标区域。 可选的,在本发明第二方面的第三种实现方式中,所述扩展模块还包括:第一判断 单元,若所述相邻区域为目标区域,则用于根据所述距离数据和所述地图数据判断所述相 邻区域是全闭合区域还是半闭合区域;第二判断单元,若所述相邻区域是全闭合区域,则用 于根据所述状态数据判断所述全闭合区域是否满足预设扩展条件;第三判断单元,若所述 相邻区域是半闭合区域,则用于根据所述状态数据判断所述半闭合区域是否满足预设扩展 条件。 可选的,在本发明第二方面的第四种实现方式中,所述第二判断单元具体用于:若 所述相邻区域为全闭合区域,则获取所述状态数据中的已扩展边界范围,判断所述已扩展 边界范围是否小于预设临界值;若判断为是,则确定所述全闭合区域满足预设扩展条件,并 对所述当前分区边界向所述全闭合区域扩展;若判断为否,则确定所述全闭合区域不满足 预设扩展条件,并终止当前分区边界的边界扩展检测。 可选的,在本发明第二方面的第五种实现方式中,所述第三判断单元具体用于:若 所述相邻区域为所述半闭合区域,则获取所述状态数据中的起始边界标记和扩展标记,判 断所述起始边界标记和所述扩展标记是否分别不等于预设起始边界值和第二预设值,所述 扩展标记的初始值为第一预设值,所述第一预设值与所述第二预设值不同,所述第一预设 值和所述第二预设值分别用于对同一分区边界上的边界扩展检测和终止同一分区边界上 的边界扩展检测;若判断为是,则确定所述半闭合区域满足预设扩展条件,并对所述当前分 区边界向所述半闭合区域扩展;若判断为否,则确定所述半闭合区域不满足预设扩展条件, 并终止当前分区边界的边界扩展检测。 7 CN 111722630 A 说 明 书 4/13 页 可选的,在本发明第二方面的第六种实现方式中,所述清洁机器人的分区边界扩 展装置还包括:更新模块,用于获取已清扫的分区区域或者已扩展的分区边界,并将所述已 清扫的分区区域或者所述已扩展的分区边界更新并标记到所述地图数据中,得到已更新的 地图数据;显示模块,用于将所述已更新的地图数据发送到目标终端,以使得所述目标终端 可视化显示所述已更新的地图数据;查询模块,当检测到所述预设分区被清扫完成时,则用 于按照所述已更新的地图数据查询待清扫的分区区域,并对所述待清扫的分区区域进行清 扫和边界扩展。 本发明第三方面提供了一种清洁机器人的分区边界扩展设备,包括:存储器和至 少一个处理器,所述存储器中存储有指令,所述存储器和所述至少一个处理器通过线路互 连;所述至少一个处理器调用所述存储器中的所述指令,以使得所述清洁机器人的分区边 界扩展设备执行上述的清洁机器人的分区边界扩展方法。 本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中 存储有指令,当其在计算机上运行时,使得计算机执行上述的清洁机器人的分区边界扩展 方法。 本发明提供的技术方案中,在环境地图中建立预设分区;根据预设分区的分区边 界确定预设分区清扫路径;当清洁机器人按照所述预设分区清扫路径前进至当前分区边界 时,获取当前分区边界的相邻区域的距离数据和地图数据,以及对应当前分区边界的状态 数据;根据所述距离数据和所述地图数据判断相邻区域是否为目标区域;若所述相邻区域 不为目标区域,则更新所述状态数据,按照所述预设分区清扫路径前进并对经过的分区边 界继续进行边界扩展检测;若所述相邻区域为目标区域,则根据所述距离数据、所述地图数 据和所述状态数据判断是否满足预设扩展条件,若判断为是,则对所述当前分区边界向所 述目标区域进行边界扩展。本发明实施例中,通过距离数据和地图数据在清洁机器人分区 清扫过程中对各分区进行边界扩展,并增加边界扩展场景,提高了分区边界扩展的准确率, 并提高了清扫效率和清扫覆盖率。 附图说明 图1为本发明实施例中清洁机器人的分区边界扩展方法的一个实施例示意图; 图2为本发明实施例中分区边界扩展场景下区域划分的一个示意图; 图3为本发明实施例中分区边界扩展场景下区域划分的另一个示意图; 图4为本发明实施例中清洁机器人的分区边界扩展方法的另一个实施例示意图; 图5为本发明实施例中分区边界扩展场景下边界对齐的一个示意图; 图6为本发明实施例中分区边界扩展场景下多次分区边界扩展异常的一个示意 图; 图7为本发明实施例中分区边界扩展场景下分区边界扩展的一个示意图; 图8为本发明实施例中分区边界扩展场景下分区边界扩展的另一个示意图; 图9为本发明实施例中清洁机器人的分区边界扩展装置的一个实施例示意图; 图10为本发明实施例中清洁机器人的分区边界扩展装置的另一个实施例示意图; 图11为本发明实施例中清洁机器人的分区边界扩展设备的一个实施例示意图。 8 CN 111722630 A 说 明 书 5/13 页











