
技术摘要:
本发明提供一种装修机器人,其包括:机械臂,所述机械臂经配置以携带装修物料或装修工具;传动装置,所述传动装置与所述机械臂连接,经配置以在驱动装置的驱动力作用下引导所述机械臂在待装修空间内移动;其中,所述驱动装置与所述传动装置连接或一体设置。本发明提供 全部
背景技术:
目前,在建筑业实际生产过程中,主要以手工操作为主,产品由工人现场制作完 成,操作者的技术操作水平对产品质量影响很大,造成质量不统一,施工周期长,人工成本 高,现阶段国内建筑市场工人将逐步老龄化,年轻人在职业选择上有了更高的追求,选择建 筑行业作业的年轻人越来越少,出现技术操作工人严重短缺,严重制约了建筑行业发。 随着装配式施工、建筑工业化的推广,传统施工模式不再适应快速发展的行业需 求,技术创新、模式创新势在必行,因此,将建筑装饰装修的智能机器人应用到建筑领域,是 行业发展的必然趋势,是市场需求和难得的发展机遇,也是很多研究机构、院校和企业在探 索的问题。
技术实现要素:
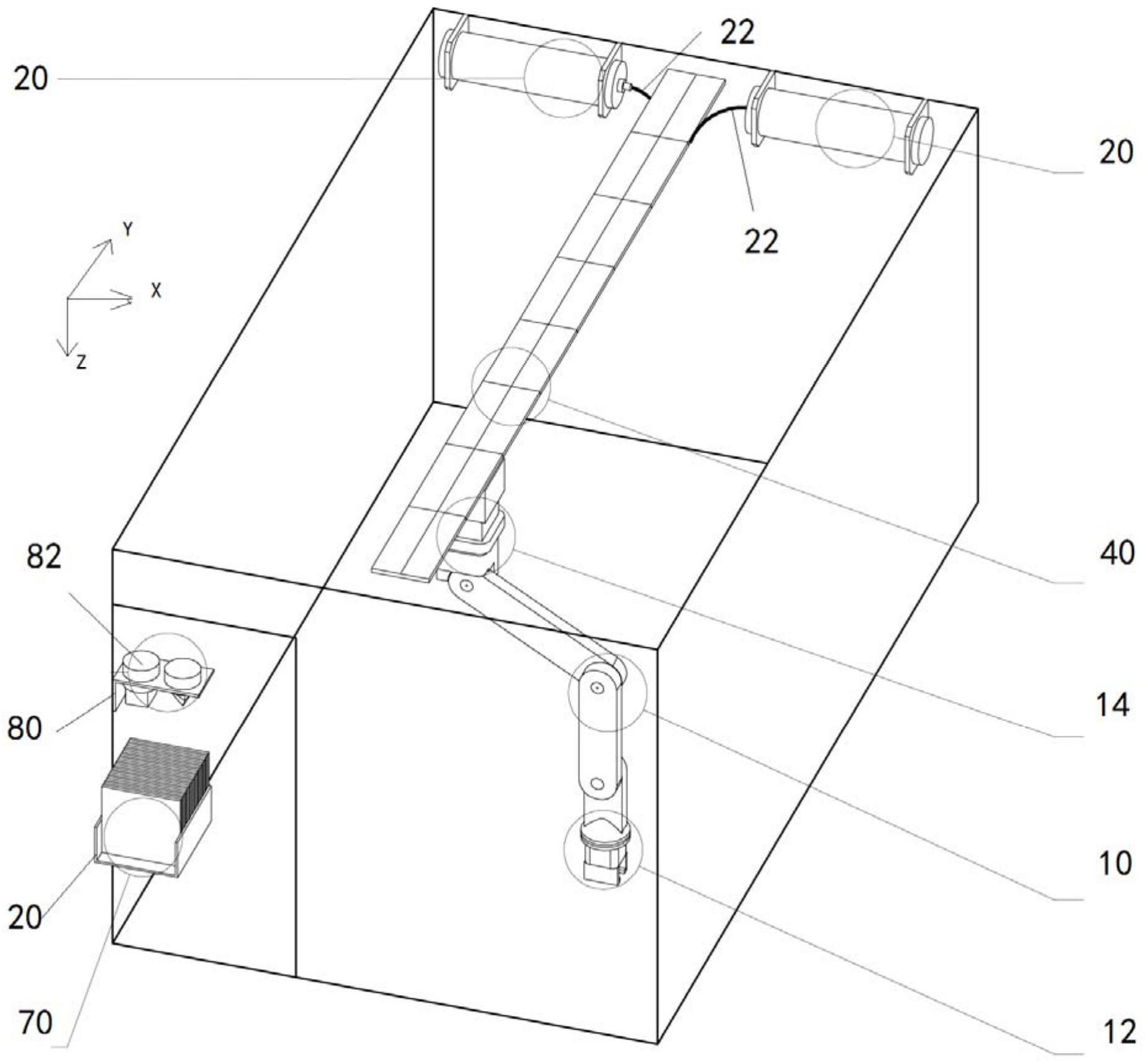
本发明为了克服上述现有技术存在的缺陷,提供一种可用于室内自动化装修的机 器人。 本发明的目的在于,提供一种装修机器人,包括: 机械臂,所述机械臂经配置以携带装修物料或装修工具; 传动装置,所述传动装置与所述机械臂连接,经配置以在驱动装置的驱动力作用 下引导所述机械臂在待装修空间内移动; 其中,所述驱动装置与所述传动装置连接或一体设置。 优选地,所述传动装置经配置以引导所述机械臂沿待装修空间的至少一个直线方 向移动。 优选地,所述传动装置包括第一传动单元,所述第一传动单元沿待装修空间的长 度方向Y延伸;所述机械臂与所述第一传动单元连接,在所述第一传动单元的引导下沿所述 长度方向Y移动。 优选地,所述第一传动单元包括双线型直线导轨;所述机械臂的底座的两端分别 可滑动地安装在所述双线型直线导轨的两个轨道上;所述第一传动单元还包括与所述驱动 装置连接的第一传动部件,所述第一传动部件位于所述双线型直线导轨的两个轨道之间, 在所述驱动装置的驱动力作用下引导所述机械臂沿所述双线型直线导轨移动;所述第一传 动部件与所述机械臂的底座的两端之间的部分连接。 优选地,所述第一传动部件为丝杠、传动皮带、或相互配合的齿轨和齿轮;其中所 述机械臂的底座与所述丝杠的螺母或传动皮带连接,或者所述齿轮安装在所述机械臂的底 座上,在所述驱动装置的驱动力作用下转动以相对所述传动齿轨移动。 优选地,所述传动装置还包括第二传动单元,所述第二传动单元沿待装修空间的 宽度方向X延伸;所述机械臂与所述第二传动单元连接,在所述第二传动单元的引导下沿宽 4 CN 111606031 A 说 明 书 2/5 页 度方向X移动;所述第二传动单元与所述第一传动单元连接,所述第二传动单元在所述第一 传动单元的引导下带动所述机械臂一起沿长度方向Y移动。 优选地,所述第一传动单元包括两个单线型直线导轨,所述两个单线形直线导轨 分别设置在待装修空间的两个相对的长度方向Y的梁上;所述第一传动单元还包括与所述 驱动装置连接的第一传动部件,每一所述单线型直线导轨一侧分别设有一所述第一传动部 件,所述第一传动部件在所述驱动装置的驱动力作用下引导所述第二传动单元移动;所述 第二传动单元包括直线双光轴,所述机械臂的底座的两端分别可滑动地安装在所述直线双 光轴的两个轴上;所述第二传动单元还包括与所述驱动装置连接的第二传动部件,所述第 二传动部件位于所述直线双光轴的两个轴之间,在所述驱动装置的驱动力作用下引导所述 机械臂移动;所述第二传动部件与所述机械臂的底座的两端之间的部分连接。 优选地,所述第一传动部件和所述第二传动部件分别为丝杠、传动皮带、或相互配 合的齿轨和齿轮中的任一种;所述直线双光轴的端部通过滑台底座与所述第一传动部件连 接;所述机械臂的底座与所述第二传动部件连接。 优选地,所述第一传动单元和所述第二传动单元分别可拆分为多个模块单元,通 过调节所述模块单元的数量来调节所述第一传动单元和所述第二传动单元的传动距离。 优选地,所述第一传动单元通过膨胀螺栓安装在待装修空间的顶部。 优选地,所述装修物料包括水泥、腻子、砖;所述装修工具包括3D扫描仪、刮平器、 喷枪、振动器;其中,所述装修物料通过不同的管道挤出至所述机械臂的操作端,所述装修 工具可拆卸地安装在所述接卸壁的操作端。 优选地,还包括装修物料供应装置和装修工具快换架;所述装修物料供应装置与 所述机械臂的操作端通过管道连接,用于存储装修物料并通过所述管道向所述机械臂的操 作端输送装修物料;所述装修工具快换架设置在待装修空间内的所述机械臂的操作端能够 触及的范围内,用于支撑放置所述装修工具。 相比现有技术,本发明提供的装修机器人具有如下优势: 采用机械臂代替传统人工操作,携带装修物料或装修工具,提供多种装修功能适 用不同的装修需求;通过驱动装置和传动装置配合引导机械臂在待装修空间内的移动,实 现自动化装修,作业范围覆盖所有待装修空间,无死角。使施工操作技术要求高、劳动强度 大的工作由机器人高替代,提高装修效率及精度。 附图说明 通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得 更加明显。 图1示出了根据本发明实施例1的装修机器人的示意图; 图2示出了根据本发明实施例1的装修机器人第一传动单元的安装示意图; 图3示出了根据本发明实施例1的第一传动部件的安装示意图; 图4示出了根据本发明实施例1的机械臂的作业范围示意图; 图5示出了根据本发明实施例2的装修机器人的示意图。 5 CN 111606031 A 说 明 书 3/5 页











