
技术摘要:
本发明公开了一种用于准直器精准对光的半自动耦光设备。包括机器视觉定位与光功率自动反馈算法,包括五维自动微调整架,位置相互垂直的两个工业相机,照明设备,光功率计,PC控制机。所述设备的待调准直器安装在五维自动微调整架上,在准直器的正上方和侧方各放置一套 全部
背景技术:
准直器是光无源器件中用于接收光信号或者发射光信号的一种元器件。两光无源 器件组合使用时,为保证光通讯系统的整体信号传输效率,要求所用光通讯器件中的准直 器耦光效率,即插损限定在一定的范围内。所以生产光无源器件必须要经过调光,现有的调 光方法有手动调光,半自动调光与自动调光。 手动调光时,工人需要先根据肉眼将发射准直器与接收准直器调平,再根据接收 准直器接收光功率变化对接收准直器的角度和位置进行反复调节。其过程复杂而又繁琐, 限制了生产效率。而如专利CN203455513U公开的一种光纤准直器自动调光装置,依旧需要 人为观察接收端光功率值变化实现调节。 现有的自动调光设备主要为单一有源对光,即在调光时仅依靠接收端光功率变化 进行调节。如专利CN107015312A公开的一种光无源器件自动耦合的系统,该系统调光前先 将待调光无源器件移动至预设零位,随后按照预设扫描路径扫描光信号,扫描结束以后将 光无源器件移动至扫描过程中记录的接收光功率最大点。该方法可以实现自动调光,但是 对机械结构的精度要求较高,且扫描耗时较长,当电机频繁的变化方向时还会导致散热问 题。
技术实现要素:
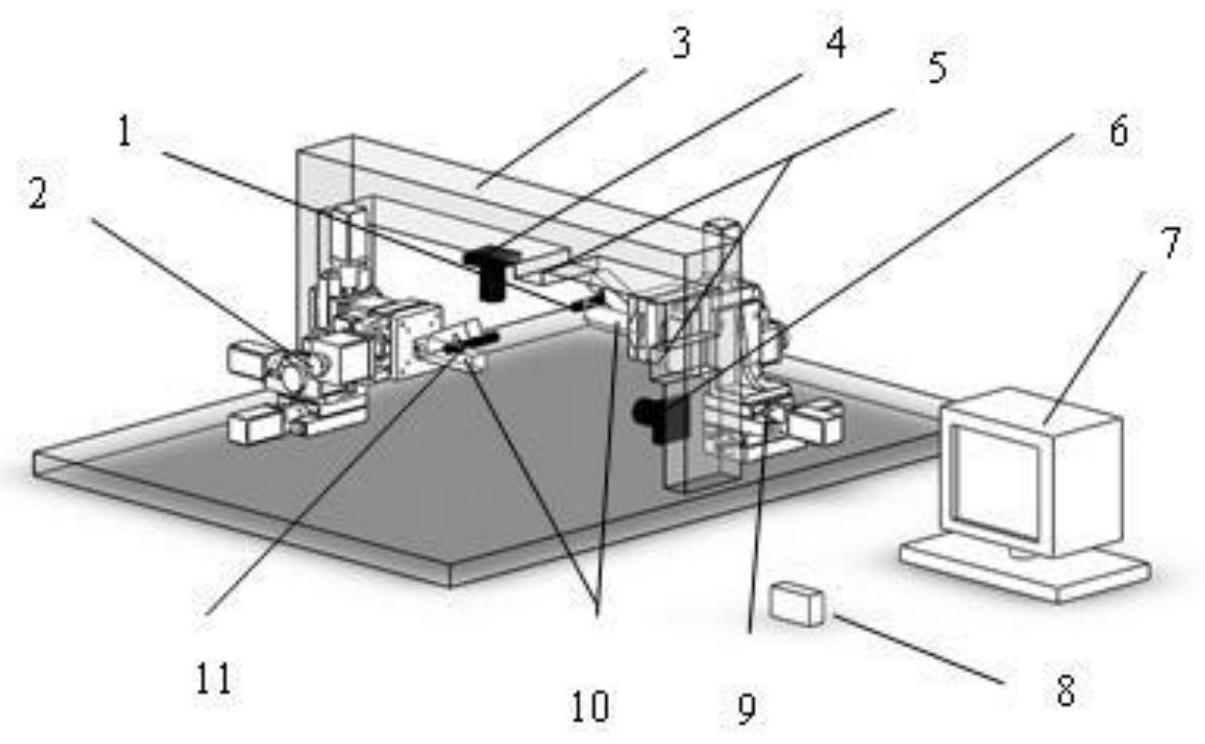
本发明提供了一种机器视觉定位自动粗对光与光功率反馈自动精对光相结合的 自动对光方式,可以有效减少自动对光所用的时间,可以有效弥补当前自动对光设备对光 对象单一的缺陷。 为达到上述目的,本发明提供如下技术方案: 一种用于准直器对光的自动对光系统,包括外部支架3,所述外部支架为龙门架结构, 照明光源5与视觉采集所用的工业相机4、6都安装于所述外部支架上,还包括两台五维自动 调整台2、9与准直器夹具10,所述准直器夹具安装于所述五维自动调整台θ轴13上,用于夹 持待调准直器,所述五维自动调整架2、9放置于外部支架3下,并将所述准直器夹具置于所 述工业相机4、6的视场范围之中,由所述照明光源5提供照明,还包括光功率检测模块8与PC 控制器7,所述光功率检测模块8在调节中连接接收准直器的尾纤,实时检测接收准直器接 收到的光功率数值,并传输数据到所述PC控制器7,所述PC控制器7处理一切信号传输与发 送控制信号。 本发明的机器视觉粗调采用双目视觉定位方案,优选的,两工业相机4、6相互垂直 90°安装于外部支架3上,优选的,采用同轴光照明,两照明设备5安装于工业相机旁,相互成 90°。 3 CN 111596425 A 说 明 书 2/4 页 本发明进行自动对光之前,需要为调整量转化算法进行图像尺寸标定,得到图像 中单个像元在实际工作范围内所代表的的尺寸,并基于此标定结果,将机器视觉定位算法 所得准直器位置偏差转化为调整量。 本发明对光时,先使用机器视觉定位实现粗调光,具体步骤如下:由工业相机4、6 拍摄接收准直器与发射准直器相对位置图像,两相机分别采集俯视图像与侧视图像发送给 PC控制器7。对于俯视图像,对图像进行腐蚀膨胀处理,针对准直器外壳对象与尾纤对象在 图像中灰度值的差异做两次阈值分割,分离出准直器与其尾纤,由此确定准直器与其尾纤 连接处的图像坐标,根据准直器的结构特性,可以取准直器与尾纤连接处后一小段尾纤中 垂线的角度位置信息作为准直器的角度位置信息。随后计算俯视图中信号发射准直器与接 收准直器的相对角度位置差,利用调整量转化算法将角度位置差计算为调整量发送给安装 有接收准直器的五维自动运动平台2,指定运动平台的θ轴和Y轴进行调整,对于侧视图作同 样处理,处理后的调整量将指定运动平台的R轴与Z轴进行调整。调整结束以后,检测接收端 光功率值是否已经达到了粗调预设值,若没有则重复粗调,若达到了则开始精调。 所述粗调光步骤结束以后进行光功率反馈精调光步骤,具体步骤如下:精调时接 收准直器所接收到的光功率值已经达到了一个阈值,预期值为-25dbm,此时准直器距离目 标位置的角度偏离<=0.5°。之后以微小步距开始移动R轴,调整至该轴光功率最大值处,后 以微小步距移动θ轴调整至该轴光功率最大值处。重复上述步骤三次,继而以微小步距调整 Y轴至该轴光功率值最大处,以微小步距调整Z轴至该轴光功率值最大处,此时若接收端光 功率值还未达到精调所要求达到的最大值,则从R轴调节开始重复。在上述每一次调节结束 以后若接收端光功率值已经达到接收端最大光功率值,则终止调节,发出调节完成信号。 与现有自动调光设备相比,本设备的优点有:使用了机器视觉粗调代替了盲目找 光粗调,可以避免盲目找光所需的大量耗时,将调光效率提高3-4倍;使用机器视觉来进行 初始定位也能提高系统稳定性和扩大系统适用范围;使用机器视觉粗调与光功率反馈精调 相结合的调光方式可以将系统对自动运动平台绝对定位精度的要求降低10-20倍。 附图说明 图1示意了本发明的结构实例; 图2为本发明所用五维调整架的结构实例; 图3为准直器图像示意图; 图4为本发明机器视觉粗调流程图; 图5为本发明光功率反馈精调流程图; 图中,1:输入准直器;2:接收准直器五维调整架;3:相机架;4:上方工业相机;5:光源; 6:侧方工业相机;7:PC控制器;8:光功率检测模块;9:输入准直器五维调整架;10:准直器夹 具;11:接收准直器;12:R轴调整架;13:θ轴调整架;14:Z轴调整架;15:X轴调整架;16:Y轴调 整架;17:尾纤;18:准直器;19:夹具。











