
技术摘要:
本发明公开了一种助行的机器人结构,包括支撑板,所述的支撑板中间固定连接有竖板,所述的支撑板前端髋部固定板,所述的支撑板底部固定连接有髋骨板,所述的髋骨板通过铰链连接有大腿板,所述的大腿板底端通过铰链连接小腿板,所述的小腿板底部通过铰链连接脚板,所述 全部
背景技术:
下肢外骨骼助行机器人技术作为人机一体化技术的重要组成部分,结合多个领域 的技术,包括:机械工程学、电子工程学、生物医学、仿生学、自动化技术、人工智能、传感科 技和信号处理技术等。目前,国内外已经投入了大量研究工作,国外已经研制出了能够走出 实验室的外骨骼机器人产品,并逐步实现了商品化,而国内的起步较晚,还处于实验研究阶 段,虽然取得了一定的成果,但离实现应用还有一定的差距。目前助行机器人结构的驱动结 构只能提供较小的驱动力,为人体提供的助力有限,并且结构复杂,足部只是一个板件,与 地面接触时会产生干涉。
技术实现要素:
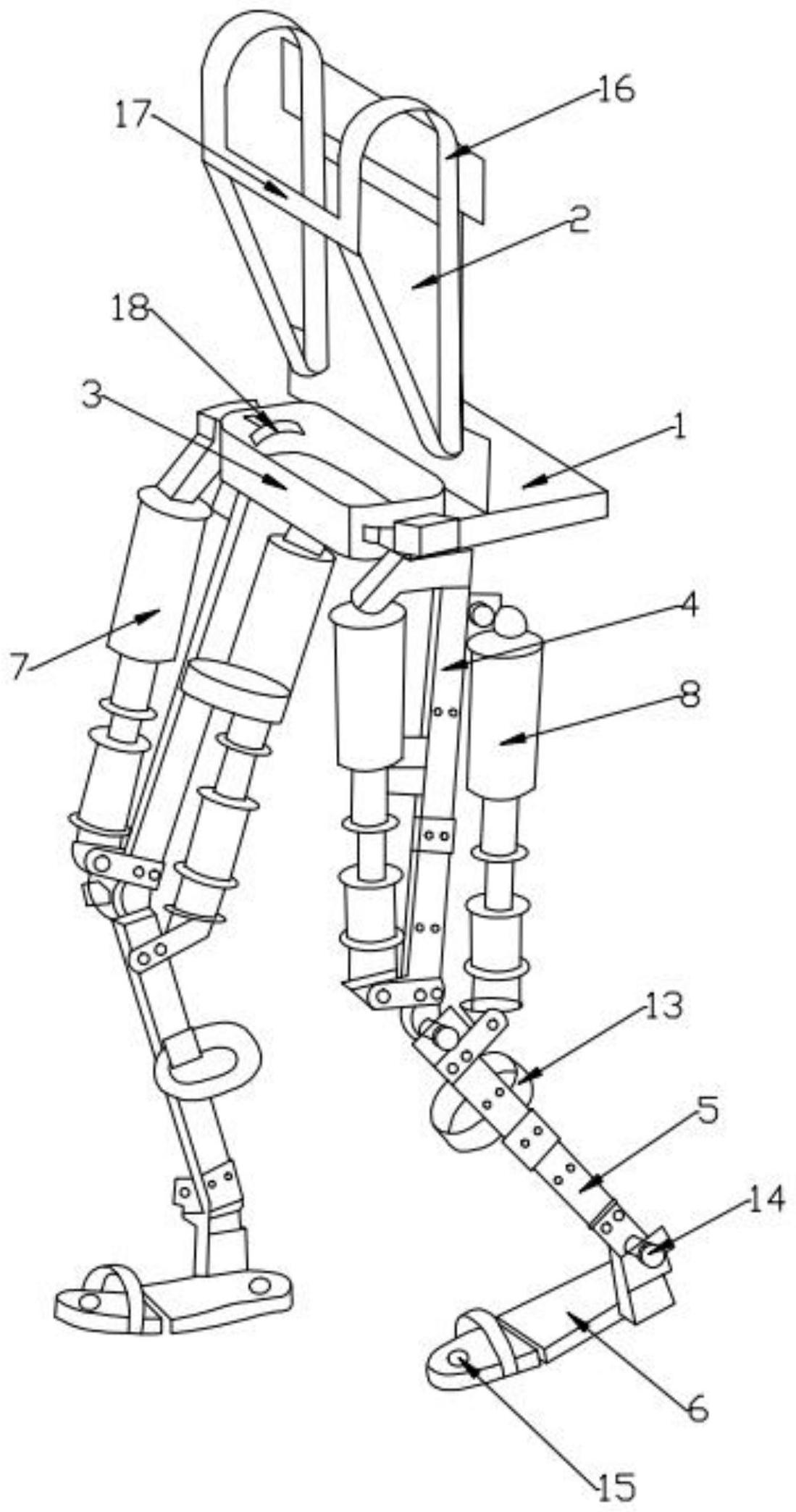
本发明的目的是克服以上的技术缺陷,提供一种助行的机器人结构,设计合理,仿 生化效果好,驱动效果好,使用舒适安全。 为解决上述技术问题,本发明提供的技术方案为:一种助行的机器人结构,包括支 撑板,所述的支撑板中间固定连接有竖板,所述的竖板上固定连接有固定带,所述的支撑板 前端髋部固定板,所述的支撑板底部固定连接有髋骨板,所述的髋骨板通过铰链连接有大 腿板,所述的大腿板底端通过铰链连接小腿板,所述的小腿板底部通过铰链连接脚板,所述 的大腿板前侧设有连接髋骨板和大腿板下端的第一驱动器,所述的大腿板后侧设有连接大 腿板和小腿板上端的第二驱动器,所述的第一驱动器和第二驱动器均为电动缸,所述的电 动缸包括编码器和电机,所述的电机通过联轴器连接滚珠丝杠,所述的大腿板、小腿板和脚 板上均连接有绑带,所述的髋骨板与大腿板连接处、大腿板与小腿板连接处、小腿板与脚板 连接处均安装有电位器,所述的脚板表面前端和后端均安装有压力传感器。 进一步的,所述的固定带和绑带均为弹性带,所述的固定带包括背带和腰带。 进一步的,所述的髋部固定板两侧安装有微型电动液压推杆,所述的髋部固定板 内侧设有连接微型电动液压推杆的弧形调节板。 进一步的,所述的大腿板、小腿板和脚板均采用铝板。 进一步的,所述的编码器的型号为EncoderHEDL5540,所述的电机型号为 maxonRE65(353296)。 进一步的,所述的第一驱动器上的滚珠丝杠的型号为TBISFS01205-2.8,所述的第 二驱动器上的滚珠丝杠的型号为TBISFS01210-2.8。 进一步的,所述的大腿板与小腿板均为套接连接的结构,表面均匀分布有螺栓孔 并通过螺栓连接固定。 进一步的,所述的电位器为角度传感器,型号为SP2801,所述的压力传感器为微型 称重传感器,型号为CXH-127。 3 CN 111604889 A 说 明 书 2/3 页 本发明与现有技术相比的优点在于:本发明通过模拟人体腿部肌肉位置和拉伸力 设置驱动器的型号和位置,具有仿生效果,采用电动缸的驱动方式,驱动效果好,使用安全 舒适,可以代替理疗师,帮助患者进行下肢康复训练。 附图说明 图1是本发明的结构示意图。 图2是本发明电动缸的结构示意图。 如图所示:1、支撑板,2、竖板,3、固定板,4、大腿板,5、小腿板,6、脚板,7、第一驱动 器,8、第二驱动器,9、编码器,10、电机,11、联轴器,12、滚珠丝杠,13、绑带,14、电位器,15、 压力传感器,16、背带,17、腰带,18、弧形调节板。











