
技术摘要:
本发明涉及基于光学谐振腔游标效应的光学陀螺,包含宽带光源、分束器、第一耦合器、第一环形波导、第二耦合器、第二环形波导、合束器、光谱仪、处理系统;本发明具有两个独立的光学谐振腔:第一耦合器、第一环形波导构成第一环形谐振腔,第二耦合器、第二环形波导构成 全部
背景技术:
光学陀螺与机电式陀螺有着不同的工作原理,其没有机电式陀螺中机械转子产生 的机械噪声和信号器产生的电气噪声,光学陀螺的噪声通常只处于量子效应水平,相对而 言,光学陀螺的测量阈值一般要比机电式陀螺高,但光学陀螺的长期稳定性要优于机电式 陀螺,且光学陀螺还具有启动快、寿命长、功耗低、体积小等优点。光学陀螺的工作原理基于 Sagnac效应,光波在传输过程中,由于相对惯性空间的旋转,会产生额外的相位,如果在任 意几何形状的闭合光路中,从某一个观察点发出的一对光波沿相反方向传输又回到该观察 点时,这对光波的相位将因闭合光路相对惯性空间的旋转而不同,这对光波的相位差的大 小与光路的旋转速度大小成正比。 目前,传统的谐振式光学陀螺采用的是一个光学谐振腔,当陀螺旋转时,光波在光 学谐振腔中的谐振频率会随旋转速度而变化,对于在光学谐振腔中相向传输的两束光波, 二者的传输方向相反,其中一束光波的传输方向与旋转速度方向相同,而另一束光波的传 输方向与旋转速度方向相反,因此,这两束相向传输的光波的谐振频率是不同的,且二者谐 振频率间的差值与旋转速度大小成正比,所以通过检测两束相向传输的光波间的谐振频率 差值,可测量旋转速度大小。 但是,对于传统的谐振式光学陀螺,只有一个光学谐振腔,光波的谐振谱较宽,导 致陀螺的精度难以进一步提升;另一方面,陀螺中相向传输的两光波均在同一光学谐振腔 中发生谐振,两光波的谐振谱相同,无法区分,因此,难以分辨旋转速度方向,需要加入相位 调制器等光学器件及复杂的信号处理系统,才能分辨旋转速度方向,这种分辨旋转速度方 向的方式增加了陀螺结构的复杂性、引入了相应的噪声,并进一步降低了陀螺的精度。
技术实现要素:
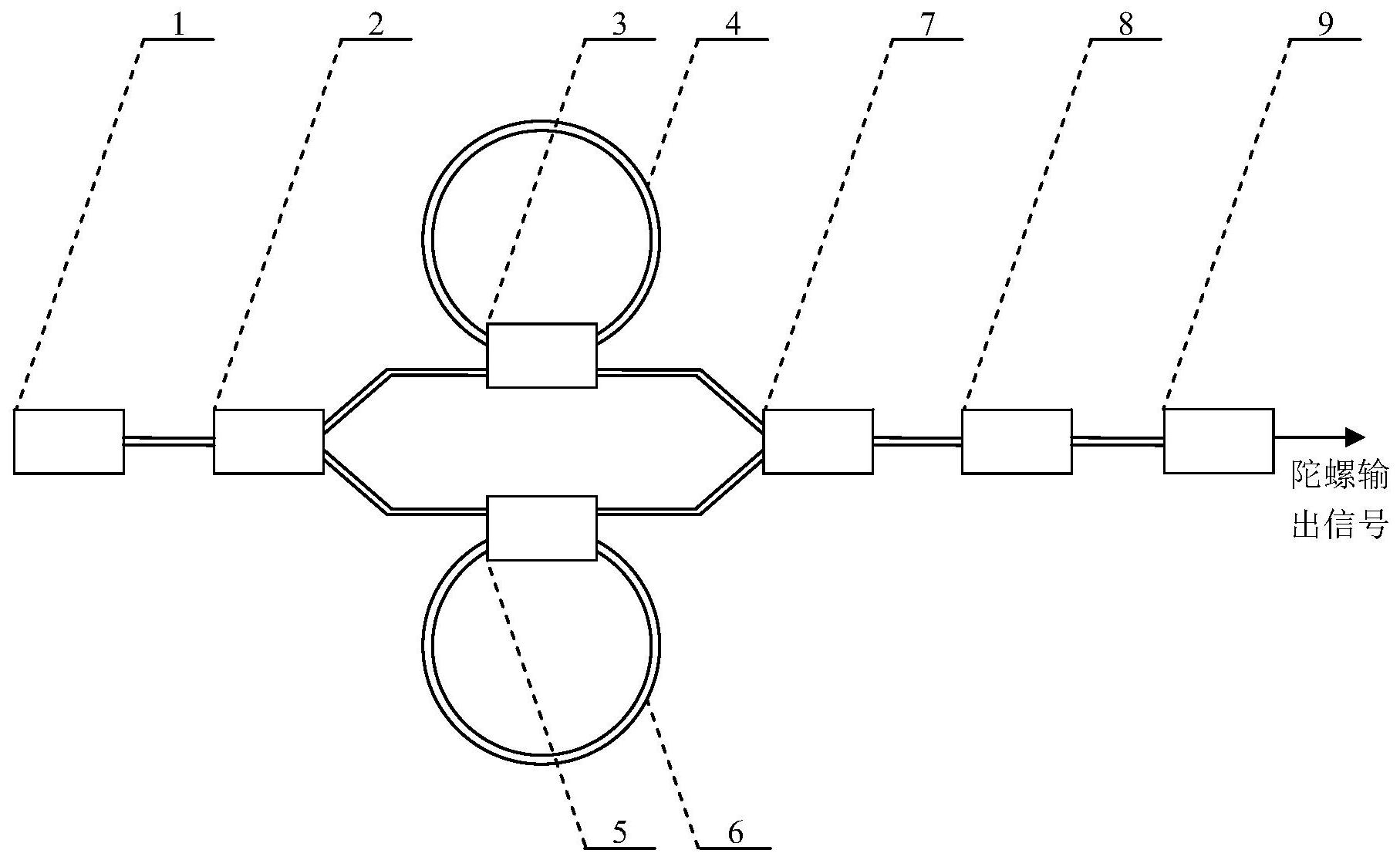
基于以上不足之处,本发明提供一种基于光学谐振腔游标效应的光学陀螺,克服 了目前光学陀螺体积大、结构复杂、精度低等问题,特别是克服了难以分辨旋转速度方向的 问题。 为了达到上述目的,本发明的技术方案是提供一种基于光学谐振腔游标效应的光 学陀螺,包含宽带光源、分束器、第一耦合器、第一环形波导、第二耦合器、第二环形波导、合 束器、光谱仪、处理系统; 宽带光源的光输出端连接分束器的光输入端,分束器的第一光输出端连接第一耦 合器的第一光输入端;第一耦合器的第一光输出端、第二光输入端连接第一环形波导,第一 耦合器的第二光输出端连接合束器的第一光输入端;分束器的第二光输出端连接第二耦合 器的第一光输入端;第二耦合器的第一光输出端、第二光输入端连接第二环形波导,第二耦 6 CN 111578924 A 说 明 书 2/8 页 合器的第二光输出端连接合束器的第二光输入端;合束器的光输出端连接光谱仪的光输入 端,光谱仪的电输出端连接处理系统的电输入端,处理系统的电输出端输出陀螺输出信号; 其中,所述的第一耦合器、第一环形波导构成第一环形谐振腔;所述的第二耦合 器、第二环形波导构成第二环形谐振腔;宽带光源的输出光经分束器后分为第一束光与第 二束光,第一束光经第一耦合器进入第一环形谐振腔,并再经第一耦合器进入合束器,而由 合束器的光输出端输出;第二束光经第二耦合器进入第二环形谐振腔,并再经第二耦合器 进入合束器,而由合束器的光输出端输出,第一束光与第二束光在合束器的光输出端相遇 并发生干涉,合束器输出的干涉光进入光谱仪,由光谱仪采集干涉光的光谱,将干涉光的光 谱转化为光谱电压信号,并将光谱电压信号输入处理系统,处理系统输出的陀螺输出信号 包含旋转速度大小及方向。 可选地,所述第一耦合器的耦合系数与第二耦合器的耦合系数不同。 可选地,所述第一环形波导的折射率与第二环形波导的折射率相同。 可选地,所述第一环形谐振腔的长度与第二环形谐振腔的长度不同。 可选地,所述宽带光源的带宽,至少是第一环形谐振腔的自由谱宽FSR1与第二环 形谐振腔的自由谱宽FSR2的最小公倍数的10倍。 可选地,所述第一耦合器与第二耦合器,均为2×2耦合器;所述分束器与合束器均 为1×2耦合器,且耦合比均为50:50。 可选地,第一环形谐振腔的透射谱为等频率间隔的第一透射谷,此频率间隔为第 一环形谐振腔的自由谱宽FSR1,且第一透射谷的最小透射率为第一环形谐振腔的谐振频率 处的透射率; 第二环形谐振腔的透射谱为等频率间隔的第二透射谷,此频率间隔为第二环形谐 振腔的自由谱宽FSR2,且第二透射谷的最小透射率为第二环形谐振腔的谐振频率处的透射 率;第一透射谷的最小透射率与第二透射谷的最小透射率不同; 第一束光在第一环形谐振腔中的传输方向与第二束光在第二环形谐振腔中的传 输方向相反;陀螺旋转时,第一透射谷与第二透射谷在频率轴上的移动方向相反。 可选地,当第一透射谷的中心频率与第二透射谷的中心频率不同时,第一透射谷 在干涉光的光谱中形成第三透射谷,第二透射谷在干涉光的光谱中形成第四透射谷;当第 一透射谷的中心频率与第二透射谷的中心频率相同时,第一透射谷与第二透射谷共同在干 涉光的光谱中形成第五透射谷; 第三透射谷的最小透射率与第四透射谷的最小透射率的比率,与第一透射谷的最 小透射率与第二透射谷的最小透射率的比率相同; 若第一透射谷的最小透射率大于第二透射谷的最小透射率,在干涉光的光谱中, 第五透射谷的最小透射率最小,第三透射谷的最小透射率最大;若第一透射谷的最小透射 率小于第二透射谷的最小透射率,在干涉光的光谱中,第五透射谷的最小透射率最小,第四 透射谷的最小透射率最大。 可选地,光谱仪采集干涉光的光谱,将干涉光的光谱转化为光谱电压信号并输入 处理系统; 在陀螺静止时,处理系统获取第一谐振频率,并将其作为原点; 在陀螺旋转时,根据第一环形谐振腔的自由谱宽FSR1、第二环形谐振腔的自由谱 7 CN 111578924 A 说 明 书 3/8 页 宽FSR2、第一束光在第一环形谐振腔中的传输方向、第二束光在第二环形谐振腔中的传输 方向,处理系统获取第二谐振频率、第三透射谷与第四透射谷在干涉光的光谱中的移动方 向,进而在第二谐振频率处按照游标卡尺的读数方法获得频差x,利用频差x与旋转速度大 小的正比关系,计算得出旋转速度大小;并且,根据第三透射谷或第四透射谷在干涉光的光 谱中的移动方向确定旋转速度方向。 可选地,陀螺静止时,在干涉光的光谱中确定任意一个第五透射谷的中心频率称 为第一谐振频率,并将第一谐振频率作为原点; 当陀螺顺时针旋转,第一束光在第一环形谐振腔中的传输方向为顺时针,而第二 束光在第二环形谐振腔中的传输方向为逆时针时,第五透射谷分裂为向低频方向的第三透 射谷,和向高频方向移动的第四透射谷; 如果第一环形谐振腔的自由谱宽FSR1大于第二环形谐振腔的自由谱宽FSR2,则在 高频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率;将第一环形谐振 腔的自由谱宽FSR1作为标尺、第二环形谐振腔的自由谱宽FSR2作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x; 如果第一环形谐振腔的自由谱宽FSR1小于第二环形谐振腔的自由谱宽FSR2,则在 低频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第二环形谐振 腔的自由谱宽FSR2作为标尺、第一环形谐振腔的自由谱宽FSR1作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x。 可选地,陀螺静止时,在干涉光的光谱中确定任意一个第五透射谷的中心频率称 为第一谐振频率,并将第一谐振频率作为原点; 当陀螺顺时针旋转,第一束光在第一环形谐振腔中的传输方向为逆时针,而第二 束光在第二环形谐振腔中的传输方向为顺时针时,第五透射谷分裂为向高频方向移动的第 三透射谷,和向低频方向移动的第四透射谷; 如果第一环形谐振腔的自由谱宽FSR1大于第二环形谐振腔的自由谱宽FSR2,则在 低频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第一环形谐振 腔的自由谱宽FSR1作为标尺、第二环形谐振腔的自由谱宽FSR2作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x; 如果第一环形谐振腔的自由谱宽FSR1小于第二环形谐振腔的自由谱宽FSR2,则在 高频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第二环形谐振 腔的自由谱宽FSR2作为标尺、第一环形谐振腔的自由谱宽FSR1作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x。 可选地,陀螺静止时,在干涉光的光谱中确定任意一个第五透射谷的中心频率称 为第一谐振频率,并将第一谐振频率作为原点; 当陀螺逆时针旋转,第一束光在第一环形谐振腔中的传输方向为顺时针,而第二 束光在第二环形谐振腔中的传输方向为逆时针时,第五透射谷分裂为向高频方向移动的第 三透射谷,和向低频方向移动的第四透射谷; 如果第一环形谐振腔的自由谱宽FSR1大于第二环形谐振腔的自由谱宽FSR2,则在 低频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第一环形谐振 腔的自由谱宽FSR1作为标尺、第二环形谐振腔的自由谱宽FSR2作为游尺,在第二谐振频率 8 CN 111578924 A 说 明 书 4/8 页 处按照游标卡尺的读数方法获得频差x; 如果第一环形谐振腔的自由谱宽FSR1小于第二环形谐振腔的自由谱宽FSR2,则在 高频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第二环形谐振 腔的自由谱宽FSR2作为标尺、第一环形谐振腔的自由谱宽FSR1作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x。 可选地,陀螺静止时,在干涉光的光谱中确定任意一个第五透射谷的中心频率称 为第一谐振频率,并将第一谐振频率作为原点; 当陀螺逆时针旋转,第一束光在第一环形谐振腔中的传输方向为逆时针,而第二 束光在第二环形谐振腔中的传输方向为顺时针时,第五透射谷分裂为向低频方向移动的第 三透射谷,和向高频方向移动的第四透射谷; 如果第一环形谐振腔的自由谱宽FSR1大于第二环形谐振腔的自由谱宽FSR2,则在 高频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第一环形谐振 腔的自由谱宽FSR1作为标尺、第二环形谐振腔的自由谱宽FSR2作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x; 如果第一环形谐振腔的自由谱宽FSR1小于第二环形谐振腔的自由谱宽FSR2,则在 低频方向确定距离原点最近的第五透射谷的中心频率称为第二谐振频率,将第二环形谐振 腔的自由谱宽FSR2作为标尺、第一环形谐振腔的自由谱宽FSR1作为游尺,在第二谐振频率 处按照游标卡尺的读数方法获得频差x。 可选地,所述的处理系统进一步包含采样电路、对比分析电路、输出电路;采样电 路的电输入端为处理系统的电输入端,输出电路的电输出端为处理系统的电输出端;光谱 仪的电输出端连接采样电路的电输入端,采样电路的电输出端连接对比分析电路的电输入 端,对比分析电路的电输出端连接输出电路的电输入端,输出电路的电输出端输出陀螺输 出信号; 采样电路接收光谱仪输出的光谱电压信号,并将其送入对比分析电路;对比分析 电路在陀螺静止时,记录第一谐振频率,并将第一谐振频率作为原点;对比分析电路在陀螺 旋转时,记录第二谐振频率、第三透射谷与第四透射谷在频率轴上的移动方向,在第二谐振 频率处按照游标卡尺的读数方法获得频差x,由频差x计算得出旋转速度大小,并且通过第 三透射谷或第四透射谷在频率轴上的移动方向确定旋转速度方向;对比分析电路将旋转速 度大小与旋转速度方向信息送入输出电路,输出电路输出包含旋转速度大小及方向的陀螺 输出信号。 本发明所述基于光学谐振腔游标效应的光学陀螺,包含两个独立的光学谐振腔, 利用两光学谐振腔的输出光的干涉所产生的光学游标效应,同时获得旋转速度大小和旋转 速度方向,因此,本发明体积小、结构简单、精度高,不包含相位调制器件及相关的电信号产 生和处理系统,不对光信号进行相位调制就能分辨旋转速度方向。 附图说明 图1为本发明的整体结构示意图; 图2是图1中处理系统的电路结构示意图。 9 CN 111578924 A 说 明 书 5/8 页











