
技术摘要:
本发明公开了绳驱机器人控制方法及系统。涉及控制领域,其中,方法通过对机器人的锚点座进行轨迹规划得到期望轨迹,然后计算期望轨迹上每个空间点的刚度矩阵,再根据目标刚度选取刚度比例因子对刚度矩阵进行优化,最后根据优化结果得到绳索长度,并进行逆解得到机器人 全部
背景技术:
随着机器人控制技术的快速发展,绳驱并联机器人在紧急救援、矿产检测、医疗和 航空航天等领域有着越来越广泛的应用。而其中通过刚度来表示机器人运作时的抗干扰能 力,设置不同的刚度会极大影响机器人的工作性能。由于目前绳驱并联机器人主要采用锚 点座固定的方式,因此改变机器人刚度只能依靠采用不同刚度的绳索来实现,这种方式控 制刚度不够灵活,难以得到目标位置下比较适宜的刚度。因此需要提出一种能够进行刚度 优化的绳驱机器人控制方法,以获得目标位置的较优刚度。
技术实现要素:
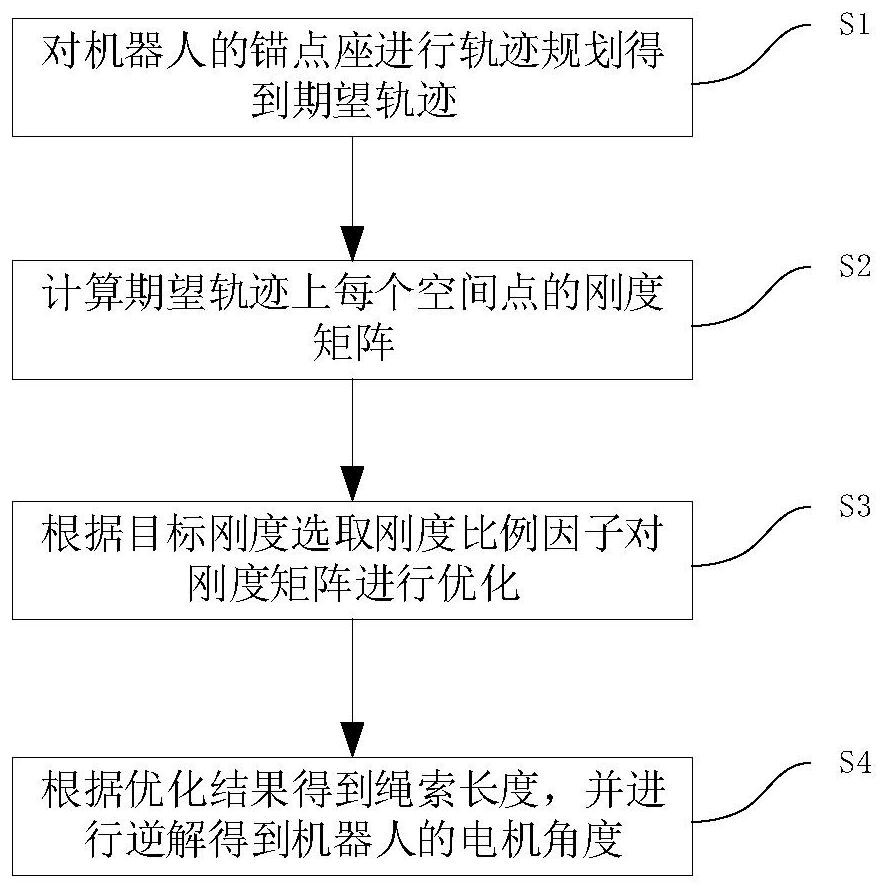
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种绳 驱机器人控制方法,能够进行刚度优化获得目标位置的较优刚度。 第一方面,本发明的一个实施例提供了:一种绳驱机器人控制方法,包括: 对所述机器人的锚点座进行轨迹规划得到期望轨迹; 计算所述期望轨迹上每个空间点的刚度矩阵; 根据目标刚度选取刚度比例因子对所述刚度矩阵进行优化; 根据优化结果得到绳索长度,并进行逆解得到所述机器人的电机角度。 进一步地,所述对所述机器人的锚点座进行轨迹规划得到期望轨迹,包括: 根据轨迹方向向量计算相邻两个空间点的距离,并根据所述距离确定轨迹节点数 量; 根据所述节点数量确定每两个节点间所述锚点座的运动速度和加速度; 根据所述运动速度和所述加速度得到期望轨迹。 进一步地,所述计算所述期望轨迹上每个空间点的刚度矩阵中所述刚度矩阵表示 为: 4 CN 111571577 A 说 明 书 2/8 页 其中,K表示刚度矩阵,E表示绳索的杨氏模量,A表示绳索的截面积, 分 别表示绳索长度,x、y、z、α、β、γ分别表示所述机器人的末端姿态,所述末端姿态包括末端 坐标和旋转角。 进一步地,目标刚度与刚度比例因子的关系表示为: k=n1·K11 n2·K22 n3·K33 n4·K44 n5·K55 n6·K66 其中,k表示目标刚度,n1,…,n6分别表示刚度比例因子,所述刚度比例因子为所述 末端姿态的各权重系数,K11,…,K66分别表示所述机器人末端的刚度值。 进一步地,所述根据目标刚度选取刚度比例因子对所述刚度矩阵进行优化的优化 算法表示为: 其中,θ表示控制所述锚点座的电机角度,k表示目标刚度,X表示所述机器人的末 端姿态。 进一步地,所述根据优化结果得到绳索长度,并进行逆解得到所述机器人的电机 角度,包括: 根据所述末端姿态和所述空间点的位置得到所述绳索长度; 根据绳索长度以及电机的绞盘半径得到所述电机角度。 进一步地,还包括对所述电机角度进行插补,以使所述机器人运动时更加平滑。 第二方面,本发明的一个实施例提供了:一种绳驱机器人控制系统,包括: 期望轨迹规划单元:用于对所述机器人的锚点座进行轨迹规划得到期望轨迹; 刚度矩阵计算单元:用于计算所述期望轨迹上每个空间点的刚度矩阵; 刚度矩阵优化单元:用于根据目标刚度选取刚度比例因子对所述刚度矩阵进行优 化; 电机角度计算单元:用于根据优化结果得到绳索长度,并进行逆解得到所述机器 人的电机角度。 第三方面,本发明的一个实施例提供了:一种绳驱机器人控制设备,包括: 5 CN 111571577 A 说 明 书 3/8 页 至少一个处理器,以及与所述至少一个处理器通信连接的存储器; 其中,所述处理器通过调用所述存储器中存储的计算机程序,用于执行如第一方 面任一项所述的方法。 第四方面,本发明的一个实施例提供了:一种计算机可读存储介质,所述计算机可 读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方 面任一项所述的方法。 本发明实施例的有益效果是: 本发明实施例通过对机器人的锚点座进行轨迹规划得到期望轨迹,然后计算期望 轨迹上每个空间点的刚度矩阵,再根据目标刚度选取刚度比例因子对刚度矩阵进行优化, 最后根据优化结果得到绳索长度,并进行逆解得到机器人的电机角度。通过优化刚度矩阵 能够根据实际位置选取最合适的刚度,提高绳驱机器人的刚度控制精度和效率。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本公开。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施 例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在附图中: 图1是本发明实施例中绳驱机器人控制方法的一具体实施例流程示意图; 图2是本发明实施例中绳驱机器人控制方法的一具体实施例x方向上刚度值迭代 曲线示意图; 图3是本发明实施例中绳驱机器人控制方法的一具体实施例y方向上刚度值迭代 曲线示意图; 图4是本发明实施例中绳驱机器人控制方法的一具体实施例z方向上刚度值迭代 曲线示意图; 图5是本发明实施例中绳驱机器人控制系统的一具体实施例结构框图。











