
技术摘要:
本发明属于时空轨迹建模与特征提取技术领域,公开一种区域栅格化与时间片段化融合的长时空轨迹预测方法:所述方法包括:步骤1,将一段连续的时空轨迹和目标时间点,通过时间片段化及区域栅格化处理为粗粒度时空轨迹,并通过时间向量化和空间向量化表示为细粒度时空轨迹 全部
背景技术:
近年来,以滴滴打车、美团外卖和百度地图为代表的用于旅行规划和日常生活的 新兴移动应用程序和服务已经成为我们生活中不可缺少的一部分,这些应用可以通过用户 的旅行记录来预测其旅行行为,从而为用户提供更加个性化的服务。但是,用户时空轨迹的 复杂性会严重影响其未来位置预测的准确性。例如,人们在工作日以相对固定的时间往返 于办公室和住宅,而在周末,人们的选择范围为更广,出行时间也更加随意。因而,针对更有 规律的工作日轨迹更容易被预测。 此外,研究表明,不仅仅是离家近的区域,一些城市公共区域也在吸引人们,如大 型购物中心和美食街,这就引起用户轨迹的更加不确定性和复杂性,与此同时,还有一些用 户的活动规律需根据其长期轨迹才能发现,例如,某用户会在每个月的固定一天去较远的 超市购买打折商品,这种长期规律往往隐藏在大量的用户移动轨迹点中,难以发现。 时空轨迹建模与特征提取,是指对一系列根据时间变化的轨迹点进行建模与特征 提取,并在给定时间的情况下,预测未知的轨迹点。 对于具有长时间复杂变化的时空轨迹,难以直接使用效果很好的基于卷积的时空 模型,基于卷积的时空模型可以在不破坏空间相对位置信息的条件下,同时捕捉复杂变化 的时空规律,已经成功应用于图像,交通等很多领域的时空序列分析。但对于时空轨迹而 言,需要定位到每个轨迹点,而不仅仅是一段区域,基于卷积的时空模型往往只能定位到区 域,太细粒度的空间划分会导致非常大的计算开销,同时也会让有效数据变得十分稀疏,不 利于时空建模。 对于现有的其他时空轨迹预测模型,往往不能像基于卷积的时空模型那样,在保 留轨迹点空间相对位置的情况下,进行时空分析,现有时空分析模型,诸如ST-RNN[2], HST-LSTM[3],STGCN[4]等,将时空信息作为循环神经网络结构中的门控制信息,以此来对 时空信息进行建模,这种方法即使可以定位到轨迹点,但相较于基于卷积的时空模型,这些 方法不能在建模时保留轨迹点的空间相对位置,因而没有直接利用到轨迹点的空间相对位 置信息,难以应对轨迹的复杂空间变化。此外,由于缺少外部存储机制,这些方法也无法对 长期轨迹变化进行很好的建模。 而一些较为普适性的时序模型也难以对复杂的长时空轨迹进行很好的建模,例如 传统的LSTM[5],或者针对长序列设计的NTM[6],DNC[7]等,这些方法在建模时没有单独考 虑空间信息,因而难以捕捉时空轨迹复杂的空间变化。 现有的长时空轨迹特征提取方法,一种是名为STGCN的循环神经网络模型,在文章 “Where to go next:A spatio-temporal gated network for next POI recommendation”被提出并使用。 4 CN 111737598 A 说 明 书 2/7 页 STGCN模型中有两个时间门和两个距离门,一对时间门和距离门被用来利用时间 间隔和距离间隔来捕捉短期兴趣,另一对时间门和距离门用来记忆时间间隔和距离间隔来 模拟长期兴趣。此外,STGCN模型通过耦合输入门和忘记门来减少参数的数量,使得模型用 于解决各种时空序列的特征提取问题时更有效。 虽然STGCN模型设计了新的时间和距离门来捕获时空间隔特征,但是不同空间区 域和不同时间段之间的时空相关性没有被明确地建模。而且两对时间门和距离门并没有针 对长短期特征进行专门的设计处理,无法充分对长短期特征进行提取。 此外,STGCN中仅使用少量参数(ct,ht)表征历史状态,因而无法对长期历史进行处 理利用,对长期时空特征提取能力较弱。 另一种是名为ARMIN的网络结构。在文章“ARMIN:Towards a More Efficient and Light-weight Recurrent Memory Network”被提出并使用。 ARMIN由一个循环单元和一个存储历史隐藏状态的外部存储器组成。在处理时空 轨迹数据时,ARMIN在每个时间步中按时间顺序执行从外部存储器读取、循环单元状态更新 和向外部存储器写入这三个操作。通过使用外部存储器,ARMIN可以对更为长期的时空轨迹 特征进行提取。 ARMIN没有有效利用时空轨迹数据中的时空信息来对外部存储进行读写控制,因 而无法从存储的长期历史数据中遴选出比较重要的时空信息,在长时空轨迹建模任务上能 力不足。
技术实现要素:
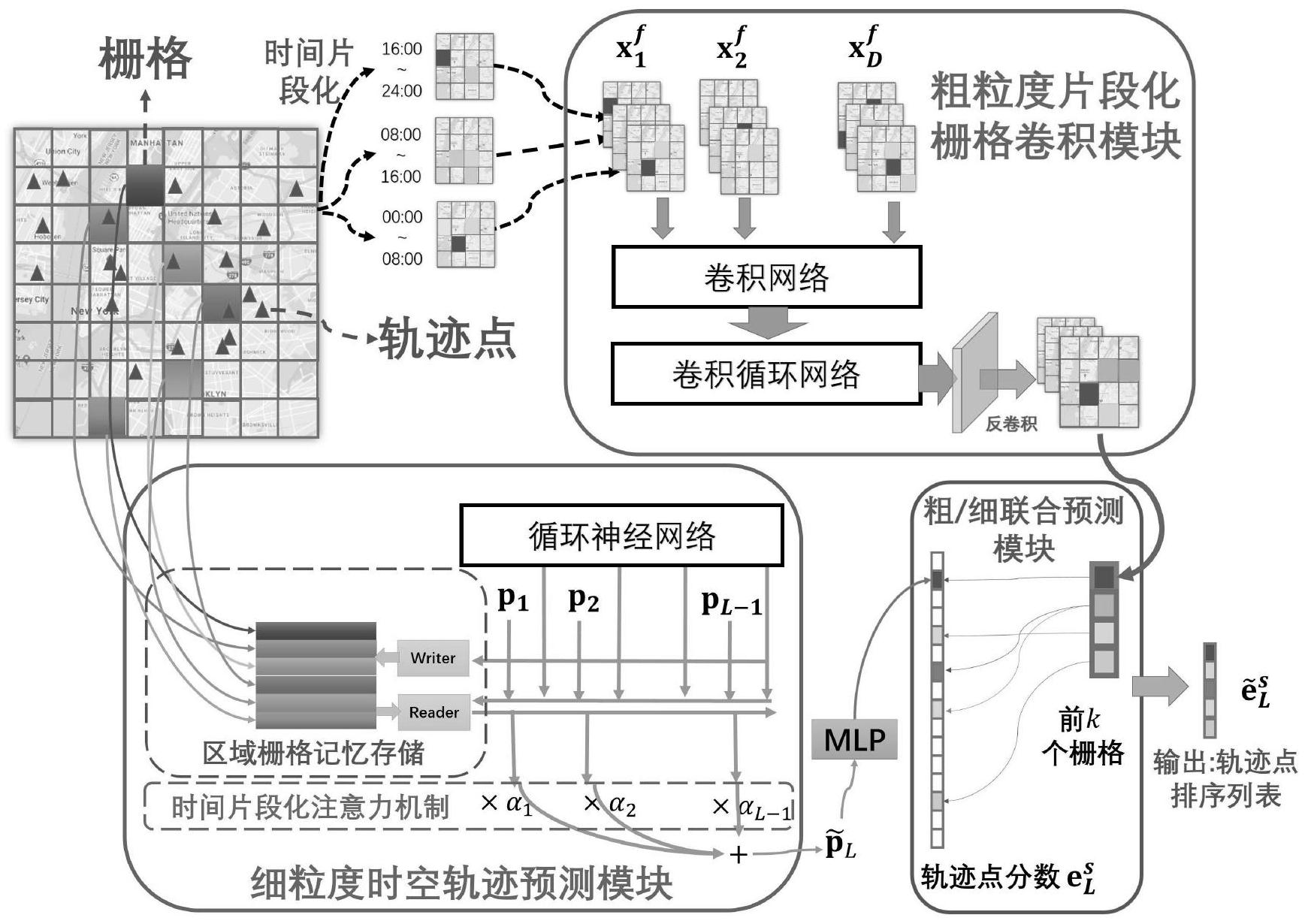
本发明提供一种区域栅格化与时间片段化融合的长时空轨迹预测方法,解决现有 技术存在的上述技术问题,通过将连续的长时空轨迹时间片段化、区域栅格化,然后通过粗 粒度片段化栅格卷积模块,细粒度时空轨迹预测模块,粗细联合预测模块,对未知轨迹点进 行预测。 为达到上述目的,本发明采用以下技术方案: 一种区域栅格化与时间片段化融合的长时空轨迹预测方法,包括: 步骤1,将一段连续的时空轨迹和目标时间点,通过时间片段化及区域栅格化处理 为粗粒度时空轨迹,并通过时间向量化和空间向量化表示为细粒度时空轨迹; 步骤2,提取所述粗粒度时空轨迹的时空特征; 步骤3,提取所述细粒度时空轨迹的时空特征; 步骤4,整合所述粗粒度时空轨迹和所述细粒度时空轨迹的特征以得到预测轨迹 点。 进一步地,步骤1中包括: 步骤1.1,将地图等分成形状大小相同的栅格; 步骤1.2,将一段时间等分成时间片段; 步骤1.3,取三维矩阵 其中,所述三维矩阵的前两维表示栅格,第三维表示时间 片段,将时空轨迹 中对应时间片段的轨迹点填入三维矩阵 重复本 5 CN 111737598 A 说 明 书 3/7 页 步骤D-1次,得到粗粒度时空轨迹 进一步地,步骤2中,通过利用粗粒度片段化栅格卷积模块提取粗粒度时空轨迹特 征。 进一步地,步骤2中,使用卷积网络提取所述粗粒度时空轨迹的空间特征;使用卷 积循环网络提取时间特征和空间特征。 进一步地,步骤3中包括: 步骤3.1,将轨迹点 输入到循环网络中,得到隐藏状态 其 中, 代表轨迹点,s指代某一条轨迹,下标1指代轨迹中的第1个轨迹点, 是轨迹点 的 向量表示; 步骤3.2,计算向量序列 其中, 代表写入信息向量,用 于向区域栅格记忆中进行写入, 代表阅读键值,用于从区域栅格记忆中进行读取,MLP(.) 是多层线性映射,[,]为拼接两个向量,所述两个向量包括 和 步骤3.3,区域栅格记忆写入,设矩阵 此矩阵代表区域栅格记忆在第0 次更新的状态,n是栅格的个数,c是特征数,R表示实数,取 l=1,...,L-1,进行如下 操作,得到 其中,M是区域栅格记忆矩阵,s指代任意序列,下标代表第几次更 新: 步骤3.31,从 中取轨迹点 所在栅格对应的那一行 其中,M是区域栅格 记忆矩阵,s指代任意序列,l-1代表第l-1次更新, 代表矩阵 中,轨迹点 实际所在 空间区域栅格所对应的那一行向量; 步骤3.32,利用循环网络RNN( )更新 公式如下: 步骤3.33,将 替换 中的 替换后的矩阵记作 其中, 代表矩阵 中,轨迹点 实际所在空间区域栅格所对应的那一行向量; 步骤3.4,区域栅格记忆读取,通过: 得到读向量序列 其中, 表示取 的第i行,βi是第i行权值,exp (.) 是指数函数; 步骤3.5,获得预测向量序列 6 CN 111737598 A 说 明 书 4/7 页 其中,MLP(.)是多层线性映射,[,]为拼接其中的向量,exp(.)是指数函数, 是时 间片段注意力权值。 进一步地,步骤4包括: 步骤4.1,取 的第三维度的第i个时间片段,记作 是一个三维矩阵, 与真实的粗粒度轨迹的 的 相对应, 是 的预测值,f指代某一条轨迹,D代 表粗粒度轨迹长度, 是一个三维矩阵,前两维对应一个实际的区域,第三维代表各时间 片段,值代表某区域在某一时间片段的访问次数; 步骤4.2,取 前k个栅格中的轨迹点根据 进行由大到小排序, 得到排序列表 其中, 是 的估计值,MLP( )是多层全连接网络,将 映射到向量 的大小为轨迹点的个数,值代表每个轨迹点被访问的可能性,值越大,可能性越高; 步骤4.3,取序列表 中的第一个值对应的轨迹点,作为预测轨迹点 与现有技术相比,本发明的优越效果在于: 1,本发明所述的区域栅格化与时间片段化融合的长时空轨迹预测方法,通过对时 空轨迹的时空特征进行提取,能够精准预测用户未来的轨迹点; 2,本发明所述的区域栅格化与时间片段化融合的长时空轨迹预测方法,通过粗粒 度时空轨迹建模,将区域栅格化、时间片段化,充分利用了基于卷积的时空特征分析,根据 时空轨迹的宏观变化特性,来对未知轨迹点可能出现的栅格进行定位; 3,本发明所述的区域栅格化与时间片段化融合的长时空轨迹预测方法,通过细粒 度时空轨迹建模,根据轨迹在空间上的栅格化分布特性来分类整合空间信息,把握长时段 轨迹空间变化规律,并根据时间片段变化规律关注更重要时段的特征信息,从而对轨迹点 进行更精细的时空预测; 4,本发明所述的区域栅格化与时间片段化融合的长时空轨迹预测方法,通过细粒 度时空轨迹建模,通过整合所述粗粒度时空轨迹和所述细粒度时空轨迹的特征的步骤,有 效的联合的两者的优势。 附图说明 图1是本发明实施例1中区域栅格化与时间片段化融合的长时空轨迹预测方法的 示意图; 图2是本发明实施例1中区域栅格化与时间片段化融合的长时空轨迹预测方法的 流程图。











