
技术摘要:
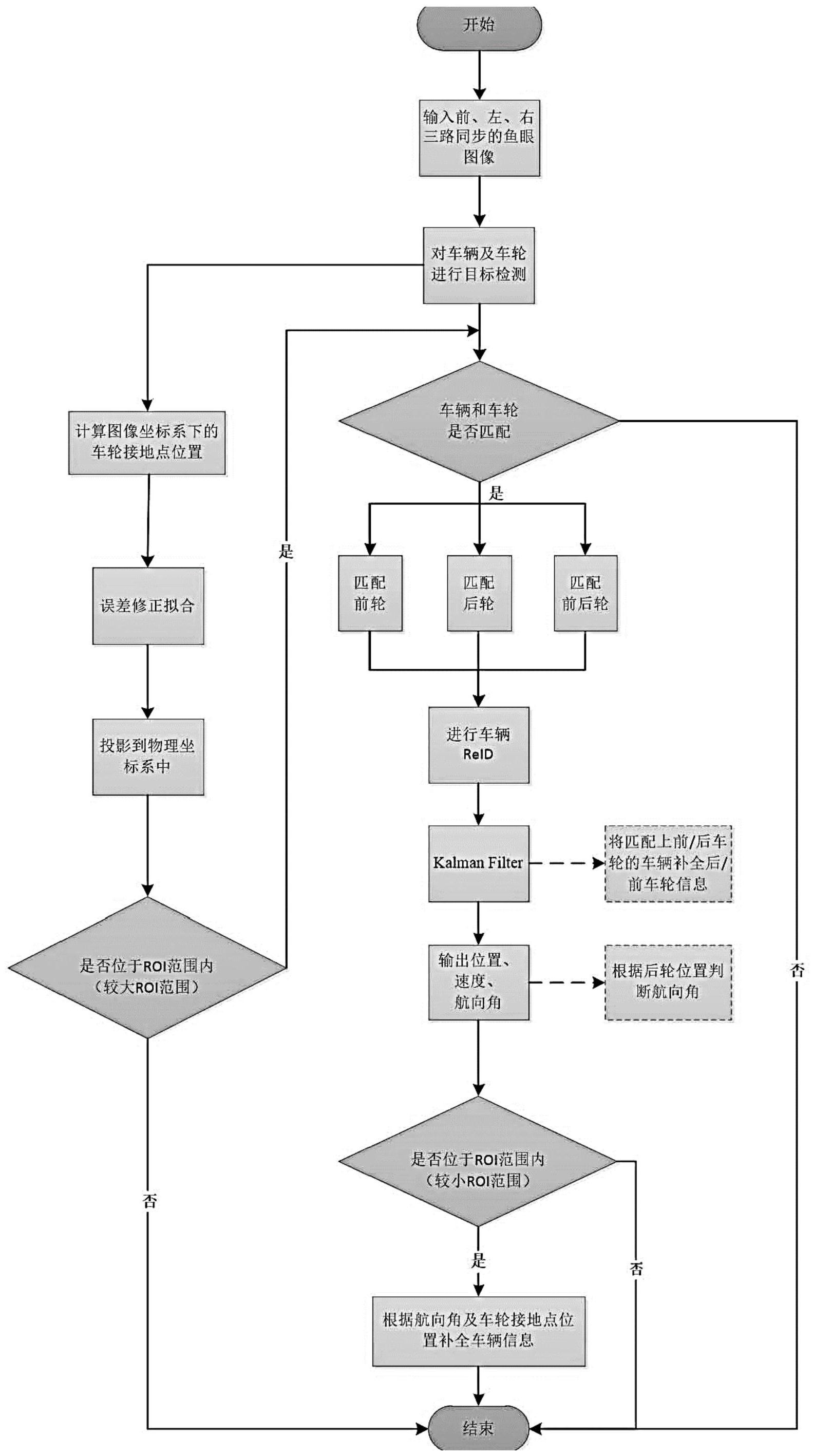
本发明提供一种基于环视的拥堵跟车系统和终端,环视图像采集模块用于利用目标检测算法检测图像中的目标车辆以及目标车辆的车轮;车辆车轮匹配模块用于判断车辆和车轮的从属关系,进而将车辆和车轮进行匹配;车辆编号模块用于给车辆车轮匹配模块匹配好的目标车辆以同一 全部
背景技术:
为驾驶车辆在标定特征的环境下分别向前、左和右移动10cm,移动后采集图 像,以摄像头采集的带有标定特征的图像坐标和物理组别为参考,寻找车头原点和标定特 征误差的拟合方法,确定车头原点与标定特征之间的坐标关系误差,以此矫正拟合参数,得 到预设范围内的拟合数据。 6.根据权利要求5所述的基于环视的拥堵跟车系统,其特征在于,所述验证模块包括标 注数据的正确性验证和投影误差拟合曲面的正确性验证。 7.根据权利要求6所述的基于环视的拥堵跟车系统,其特征在于,所述标注数据的正确 性验证包括:在车载系统中生成拟合误差用的文件和误差分析文件,误差分析文件中误差 值大于预设值的1~4倍时,要检查对应的标注是否有误。 8.根据权利要求7所述的基于环视的拥堵跟车系统,其特征在于,所述验证模块中投影 误差拟合曲面的正确性验证包括: S0501:棋盘格数据验证; S0502:RTK真值数据验证; S0503:图像上检测点和人工标注接地点分别经过拟合曲面,再求差,看误差。 9.一种移动终端,其特征在于:其可以是车载终端或手机移动终端,其执行上述权利要 求1-8所述基于环视的拥堵跟车系统的车载终端或手机移动终端。 2 CN 111605481 A 说 明 书 1/6 页 基于环视的拥堵跟车系统和终端 技术领域 本发明涉及汽车电子技术领域,特别是涉及一种基于环视的拥堵跟车系统和终 端。
技术实现要素:
车辆与车辆之间距离的测量为公路上车辆间通信或者实现自动/辅助驾驶提供极 其重要的信息,几乎所有的车辆预警类型都需要将车辆测距作为一项关键的输入参数,比 如最低等级的车道偏离预警,精度要求在10厘米以下计算本车车轮到车道线内外边缘的距 离,高级一些的类似车辆碰撞预警功能,就需要实时快速的计算出本车到周边车辆的距离。 因此,我们提出了一种基于环视的拥堵跟车系统和终端。











