
技术摘要:
本发明属于图像处理及形心定位领域,具体涉及了一种基于边缘提取的快速形心定位方法、系统及装置,旨在解决现有技术无法实现目标小天体形心的快速精确提取的问题。本发明包括:进行目标天体图像的二值化分割;提取二值化目标天体图像的边缘并标记;通过标记算法计算带 全部
背景技术:
深空探测的重要目的是寻求开发和利用空间资源的途径,以解决人类日益面临的 资源和环境的挑战。深空探测中对小行星的探测和撞击是获取宇宙信息,实现人类深空探 测最终目的的基础。 传统对小行星的形心定位方法,主要是通过基于灰度的估计方法对小行星面目标 进行形心定位,在给定图像区域内直接利用灰度加权信息进行形心检测。由于利用了区域 内所有信息,因此对噪声和孤立点具有鲁棒性。但是,这种方法计算量大、速度慢,很难满足 系统实时性的要求。 一些文章也提出了通过基于梯度的估计方法,将面目标简化为线目标来提升形心 定位的速度,基于梯度的估计方法一般包括边缘的精确提取和椭圆拟合两个步骤,其中边 缘的精确提取包括梯度估计、非最大化抑制、阈值分割和亚像素估计等步骤,这些计算复 杂,严重影响拟合算法的实时性。 总的来说,传统的小行星的形心定位方法计算量大、速度慢,而现有的基于边缘提 取的小行星的形心定位方法,边缘的精确提取过程计算复杂,严重影响后续拟合算法的实 时性,本领域还急需一种小行星的形心定位方法,可以在保证精度的前提下,实现小行星的 快速形心定位。
技术实现要素:
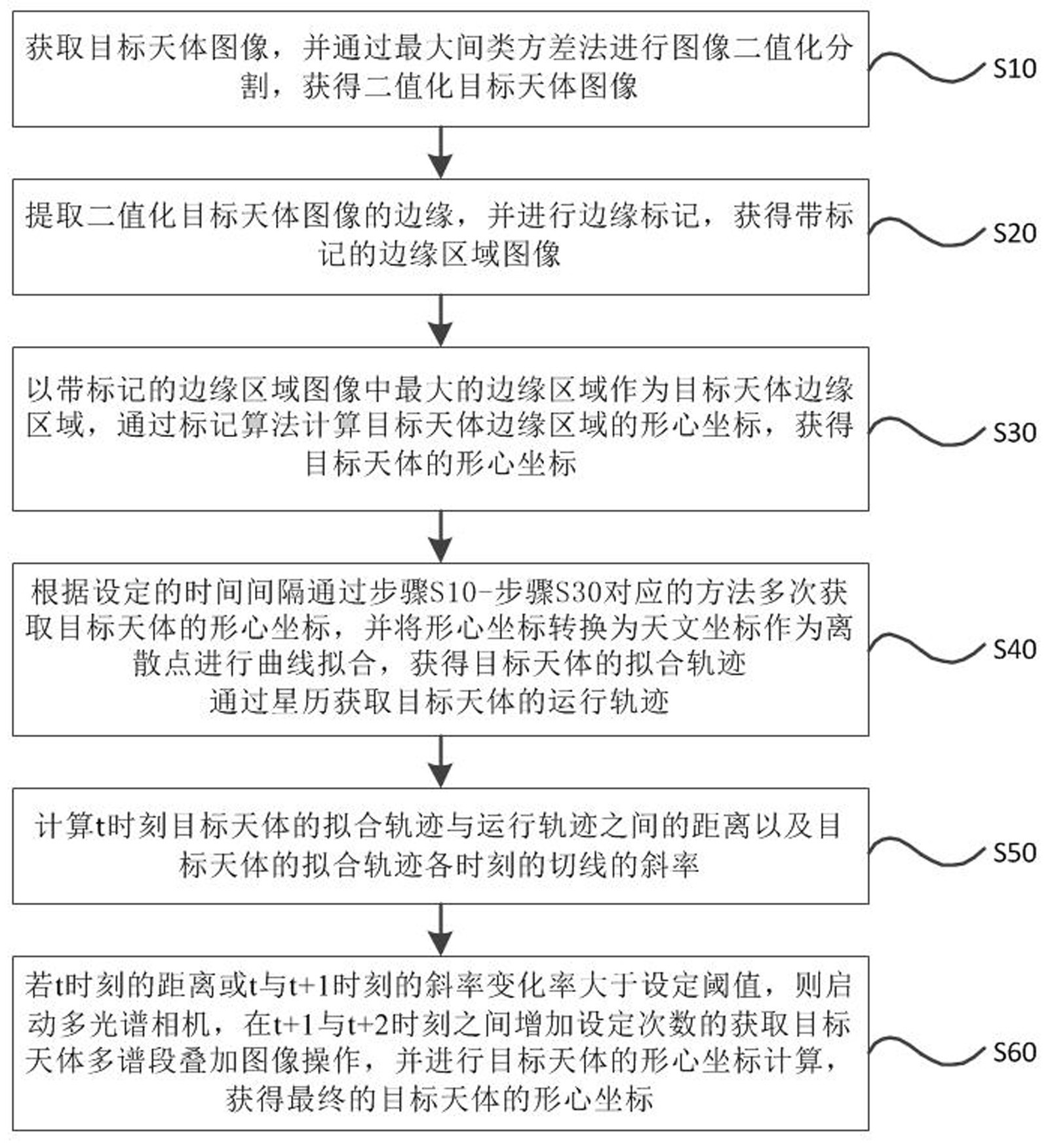
为了解决现有技术中的上述问题,即现有技术无法实现目标小天体形心的快速精 确提取的问题,本发明提供了一种基于边缘提取的快速形心定位方法,该形心定位方法包 括: 步骤S10,获取目标天体图像,并通过最大类间方差法进行图像二值化分割,获得二值 化目标天体图像; 步骤S20,提取所述二值化目标天体图像的边缘,并进行边缘标记,获得带标记的边缘 区域图像; 步骤S30,以所述带标记的边缘区域图像中最大的边缘区域作为目标天体边缘区域,通 过标记算法计算所述目标天体边缘区域的形心坐标,获得目标天体的形心坐标; 步骤S40,根据设定的时间间隔通过步骤S10-步骤S30对应的方法多次获取目标天体的 形心坐标,并将所述形心坐标转换为天文坐标作为离散点进行曲线拟合,获得目标天体的 拟合轨迹;通过星历获取目标天体的运行轨迹; 步骤S50,计算t时刻目标天体的拟合轨迹与运行轨迹之间的距离以及目标天体的拟合 轨迹各时刻的切线的斜率; 4 CN 111739039 A 说 明 书 2/8 页 步骤S60,若t时刻的距离或t与t 1时刻的斜率变化率大于设定阈值,则启动多光谱相 机,在t 1与t 2时刻之间增加设定次数的获取目标天体多谱段叠加图像操作,并进行目标 天体的形心坐标计算,获得最终的目标天体的形心坐标。 在一些优选的实施例中,步骤S20中“提取所述二值化目标天体图像的边缘”,其方 法为: 步骤S211,将所述二值化目标天体图像的左上角坐标设为(0,0); 步骤S212,在0≤x<Nh-1且0≤y<Ml-1范围内依次进行横向和纵向扫描,若当前点(x, y)的像素值为255,则跳转步骤S213;其中,Ml和Nh为所述二值化目标天体图像的列数和行 数; 步骤S213,判断当前点(x,y)的8个邻域点的像素值是否都为255,若为是,则将当前点 (x,y)的像素值置为0;若为否,则跳转步骤S214; 步骤S214,判断是否遍历完所述二值化目标天体图像,若为否,则跳转步骤S212;若为 是,则完成边缘提取。 在一些优选的实施例中,步骤S20中“进行边缘标记,获得带标记的边缘区域图 像”,其方法为: 步骤S221,在边缘提取后的图像中寻找一个灰度级为255的种子点,并将其像素值改写 为标号值Snum=254; 步骤S222,在该种子点的8个邻域内寻找像素值255的像素点,将其像素值改写为与种 子点相同的标号值并存入堆栈区; 步骤S223,在堆栈区像素的8个邻域内寻找像素值255的像素点存入堆栈区,并将这些 像素点的像素值改写为与种子点相同的标号值,将像素点释放出堆栈区; 步骤S224,判断堆栈区是否还有像素点,若有,则跳转步骤S223;否则,跳转步骤S225; 步骤S225,令Snum=Snum-1,并判断是否遍历了边缘提取后的全图像,若没有,则跳转步 骤S221;否则,完成边缘标记。 在一些优选的实施例中,步骤S30中“通过标记算法计算所述目标天体边缘区域的 形心坐标,获得目标天体的形心坐标”,其方法为: 设目标天体边缘图像的像素点的灰度值为 ,其中, 和 分别为像素点在 图像中的行数和列数,其 阶笛卡尔系几何矩阵为 ; 其中,W和H分别为目标天体边缘图像的宽和高; 则目标天体的形心坐标 为: 。 在一些优选的实施例中,步骤S10之前还包括: 将目标天体附近的天体设为参考天体群,根据所述参考天体群的图像颜色获取主要光 源颜色在所述参考天体群中的渐变趋势,根据所述渐变趋势,增强目标天体在所述渐变趋 势渐弱方向部分的主要光源颜色或减弱目标天体在所述渐变趋势渐强方向部分的主要光 源颜色。 5 CN 111739039 A 说 明 书 3/8 页 在一些优选的实施例中,步骤S20中“提取所述二值化目标天体图像的边缘”之后 还包括边缘信息补充的步骤,其方法为: 获取目标天体的自旋方向和自旋周期,标记t1时刻目标天体高辨识度面的边缘点集, 计算高辨识度面的边缘点集出现在低辨识度面的时刻t2; 在t2时刻采用t1时刻目标天体高辨识度面的边缘点集补充其对应位置的边缘点集。 本发明的另一方面,提出了一种基于边缘提取的快速形心定位系统,基于上述的 基于边缘提取的快速形心定位方法,该形心定位系统包括输入模块、图像分割模块、边缘提 取及标记模块、形心坐标计算模块、轨迹获取模块、形心坐标修正模块和输出模块; 所述输入模块,配置为获取目标天体图像并输入; 所述图像分割模块,配置为通过最大类间方差法进行所述目标天体图像的图像二值化 分割,获得二值化目标天体图像; 所述边缘提取及标记模块,配置为提取所述二值化目标天体图像的边缘,并进行边缘 标记,获得带标记的边缘区域图像; 所述形心坐标计算模块,配置为以所述带标记的边缘区域图像中最大的边缘区域作为 目标天体边缘区域,通过标记算法计算所述目标天体边缘区域的形心坐标,获得目标天体 的形心坐标; 所述轨迹获取模块,配置为根据设定的时间间隔通过输入模块、图像分割模块、边缘提 取及标记模块和形心坐标计算模块多次获取目标天体的形心坐标,并将所述形心坐标转换 为天文坐标作为离散点进行曲线拟合,获得目标天体的拟合轨迹;通过星历获取目标天体 的运行轨迹; 所述形心坐标修正模块,配置为计算t时刻目标天体的拟合轨迹与运行轨迹之间的距 离以及目标天体的拟合轨迹各时刻的切线的斜率,若t时刻的距离或t与t 1时刻的斜率变 化率大于设定阈值,则启动多光谱相机,在t 1与t 2时刻之间增加设定次数的获取目标天 体多谱段叠加图像操作,并进行目标天体的形心坐标计算,获得最终的目标天体的形心坐 标; 所述输出模块,配置为输出获取的目标天体的形心坐标。 本发明的第三方面,提出了一种存储装置,其中存储有多条程序,所述程序适于由 处理器加载并执行以实现上述的基于边缘提取的快速形心定位方法。 本发明的第四方面,提出了一种处理装置,包括处理器、存储装置;所述处理器,适 于执行各条程序;所述存储装置,适于存储多条程序;所述程序适于由处理器加载并执行以 实现上述的基于边缘提取的快速形心定位方法。 本发明的有益效果: (1)本发明基于边缘提取的快速形心定位方法,将形心提取中的面目标简化为线目标, 在保证精度的同时,大大降低了计算量,提高了计算速度,解决了大范围成像中目标形心的 快速定位问题。 (2)本发明基于边缘提取的快速形心定位方法,将提取的目标天体形心坐标转换 为天文坐标并进行拟合,以拟合轨迹的斜率变化过大或者拟合轨迹与实际目标天体的运行 轨迹之间的距离过大为依据,启动多光谱相机,获取目标天体多谱段叠加图像,并再次进行 形心坐标计算,大大提高了形心提取的精度和准确度。 6 CN 111739039 A 说 明 书 4/8 页 附图说明 通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它 特征、目的和优点将会变得更明显: 图1是本发明基于边缘提取的快速形心定位方法的流程示意图。











