
技术摘要:
一种用于确定内燃机的位置的方法,所述内燃机包括至少一个气缸,其中检测表示所述内燃机的速度的速度信号的变化过程,并且基于所述速度信号的变化过程,通过执行至少一个求和,生成所产生的信号(100),而且在所述所产生的信号(100)的变化过程中,识别出如下信号模 全部
背景技术:
对于现代内燃机的运行而言必需的是,为电子发动机控制设备提供关于瞬时发动 机转速的信息,所述电子发动机控制设备操控(ansteuert)内燃机。这样已知的是,经由感 应式起作用的传感器或者霍尔传感器,检测机器或发动机的曲轴的转动速度。所述感应式 起作用的传感器或者霍尔传感器记录掠过的(vorbeistreichende)金属标记,并且经由两 个标记之间的时间差来确定旋转速度。 在下文也称作发动机或者机器的传统的内燃机中,借助发动机管理软件,通过发 动机控制设备控制喷射和点火。该软件必须有如下内容的认知:为了引起喷射和点火,气缸 处于哪个位置,或处于哪个起升高度。为了实现这一点,可以使用安置在内燃机的曲轴上的 传感器轮,所述传感器轮具有多个齿并且在周长上具有槽。同样,在有些情况下,具有数个 齿的传感器轮可以安置在凸轮轴上。 接着,传感器被安置在这些传感器轮上,所述传感器轮在机器工作并且由此曲轴 转动时产生电信号。这些传感器轮与机器的机械位置有固定的关系。 在(例如在具有一个气缸的四冲程发动机中的)工作周期或工作循环中,曲轴旋转 两次,凸轮轴仅旋转一次。这样,可以在曲轴的电信号上观察到或检测到间隙两次。因而,虽 然经由间隙可以确定曲轴位置,但是不能确定工作冲程。这样,例如在压缩冲程结束时得到 上死点,并且在排放冲程(Ausblastakt)或排气冲程结束时得到上死点,这些上死点不能通 过齿槽信息来区分。 现在,软件必须利用算法在曲轴信号中检测到间隙,并且区分这是在工作冲程中 的第一转的间隙GAP0,还是在工作冲程中的第二转中的间隙GAP1。为此,可以使用凸轮轴信 号的轮廓。一旦该软件已辨识出间隙或GAP,该软件就与发动机位置同步。现在,该软件知道 气缸的位置或起升高度,并且可以在时间上规定喷射和点火。 在具有两个传感器的系统中,同样可能的是支持安全模式。如果例如曲轴信号有 错误,则在特定的曲轴传感器轮的情况下始终还可能的是,使该软件与发动机位置同步。然 而,通过发动机管理软件提供的信息的精度也许并不是非常高,并且因而转矩在可称作曲 轴安全模式的这种模式中受限。 相对应地,如果凸轮轴传感器信号有错误,则始终还可能的是,利用曲轴信号单独 地在双点火模式中驱动发动机。同样可能的是,利用软件控制的方法(如例如测试喷射)辨 识出间隙,也就是,是存在GAP0还是存在GAP1。 在价格低廉的两轮分段(Zweirad-Segment)中,通常仅提供曲轴传感器信号,当发 动机具有多于一个的气缸时,也如此。为了使该软件与发动机位置同步,使用软件技术。已 知的技术之一在于,与曲轴传感器信号相组合地使用进气管压力信号信息,以便检测发动 3 CN 111601960 A 说 明 书 2/6 页 机位置。 在出版文献DE 10 2014 206 182 A1中,公开了一种用于确定内燃机的曲轴位置 的方法,其中在一时间期间检测曲轴的转速变化过程,其中通过利用内燃机的工作循环的 已知的转速变化过程来调整(Abgleich)该转速变化过程,确定曲轴位置。已知的转速变化 过程在此具有表征曲轴位置的区间(Abschnitt)。
技术实现要素:
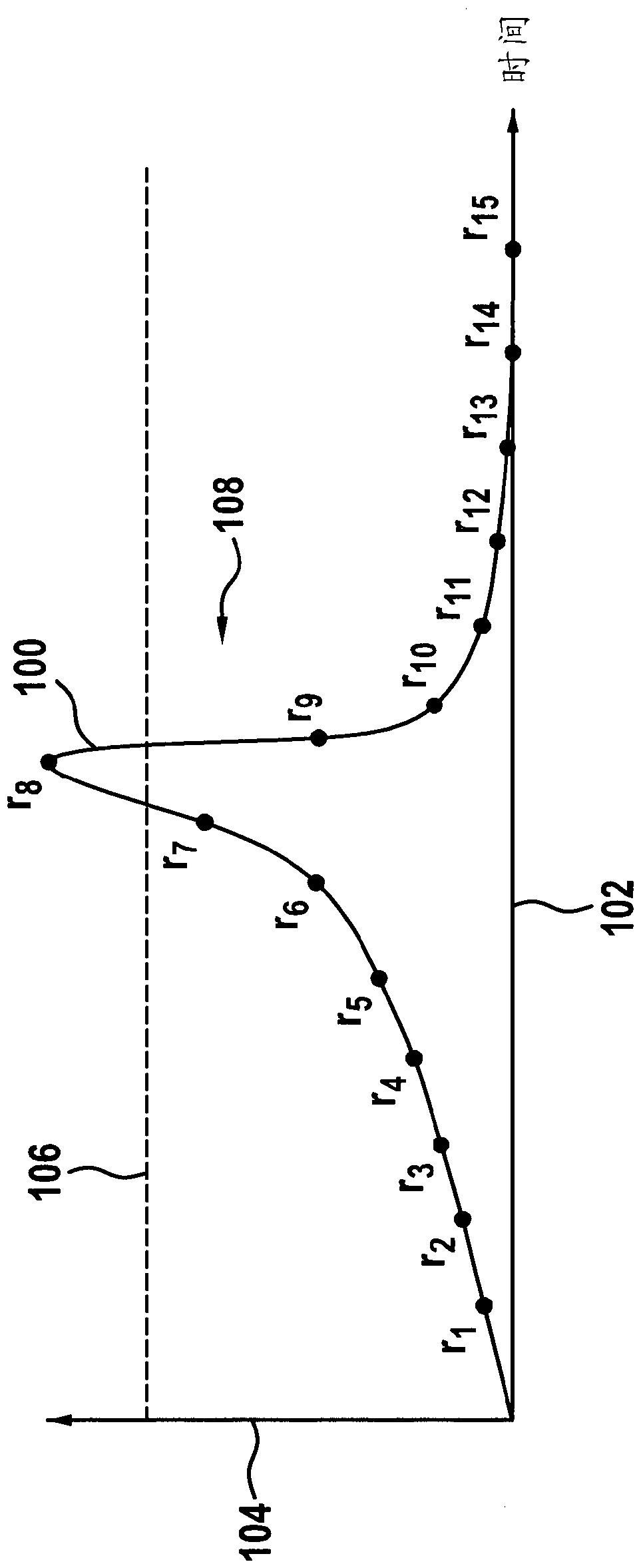
在该背景下,介绍了一种具有权利要求1的特征的方法和一种根据权利要求11所 述的装置。此外,介绍了一种按照权利要求12所述的计算机程序和一种根据权利要求13所 述的机器可读的存储介质。实施方案从从属权利要求和说明书中得到。 所介绍的方法使得能够,确定发动机位置、也就是一个或者多个气缸所处的位置, 并且由此确定工作冲程。在此也可谈及的是,该方法用于确定曲轴位置。因而可能查明,该 或者所述多个气缸处于哪个工作冲程,并且相对应地通过软件的同步而在时间上规定喷射 和点火。 因此,所描述的方法所基于的是,生成或产生使用发动机速度信号的信息的信号, 所述发动机速度信号由发动机控制设备接收到。所述发动机速度典型地说明发动机的转 速。通常,要么通过曲轴传感器信号,要么通过发电机的信号,提供速度信息,所述发电机在 两轮的情况下直接安置在曲轴上。 所产生的信号突出在高压弯道的上死点(OT)的压缩范围中的在发动机速度信息 或发动机转速中的显著改变。如果使用该信号模式,则简单地可能的是,检测到内燃机中的 气缸的位置。在单缸发动机的情况下,在一个工作循环期间仅存在一次由于高压弯道中的 压缩和减压引起的转速改变。 如已经在前面曾详加说明的那样,该方法仅仅需要发动机速度信号。没有其他信 号和信息是必要的。尤其是在所有具有单个气缸、两个气缸的所有两轮系统中,并且即使在 多气缸系统中,也可以有效地采用该方法来检测发动机位置。 至少在所述实施方案中的数个实施方案中,所介绍的方法具有下列优点: - 如果起动器驱动该机器,则在所有可能的运行状态中利用少量信息可能可靠地检测 到发动机位置信息, - 所介绍的算法可以被使用,以便在脚踏起动期间检测到相位或工作冲程, - 提供机器速度信息的发电机信号同样可以被使用,以便检测发动机位置。因此,可以 节约针对传感器轮、传感器和信号处理电路的成本, - 与另外的行为方式相比,该算法可以更快地检测到发动机位置,因而可以更快地执 行发动机起动, - 不存在对在起动期间在双点火模式中运行该机器的需求,因为可以更快地检测到工 作冲程, - 提高了火花塞的使用寿命, - 该方法可以被用于在起动期间检测工作冲程。同样可能的是,在重新同步时,在电机 的速度更高的情况下,采用该方法。因而,与另外的方法相比,扩宽了该方法的应用领域。附 加方法的采用并不必要,因而降低了软件的复杂性, 4 CN 111601960 A 说 明 书 3/6 页 - 与另外的工作冲程检测方法相比,同样更快地可能校准该算法。 附图说明 本发明的其他优点和构建方案从说明书和所附的附图中得到。 应理解的是,不仅以分别所说明的组合,而且以另外的组合,或者单独地,可使用 前面所提到的并且下面还要阐述的特征,而不离开本发明的范围。 图1示出了曲轴信号和凸轮轴信号的变化过程(Verlauf)。 图2以曲线图示出了发动机在借助机电启动器(Anlasser)起动时的速度特性。 图3示出了描述关系的信号的变化过程。 图4依据状态机示出了所介绍的方法的流程。 图5至10示出了曲轴信号的变化过程。 图11以曲线图示出了利用脚踏起动器起动的转速特征。











