
技术摘要:
本发明提供一种弹性波速度反演方法和装置,该方法包括:获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前深度偏移剖面;从该叠前深度偏移剖面中提取反射界面深度;根据该共成像点道集和该反射界面深度生成估计偏移深度;根据该反射界面深度和该估计偏移深度 全部
背景技术:
油气地震勘探的根本任务是根据观测到的各种信息研究和提取有关地下介质的 物性参数(如速度、密度等),并对储层的含油气性做出评价,完成这一任务主要有正演和反 演两个途径。反演根据各种地球物理观测数据推测地球内部的结构、形态及物质成分,定量 计算各种相关的地球物理参数,应用十分广泛。 油气勘探行业的许多观测结果在一定程度上依赖于反演结果的资料解释,究其原 因,对于许多观测资料解释问题,没有一个可将多种观测结果(如有效信号及其能量衰减、 噪声、其他各种相关误差等)关联起来的解析解,在这种情况下,必须求助于反演这一数学 方法,先估算一个结果,然后对照观测数据检查反演结果,并进行适当修正,最终得到合理 答案。 如今,叠前地震反演技术已成为油气勘探的常规技术,并在复杂储层精细预测、储 层流体识别等领域展示了良好的应用前景。而叠前深度偏移(Pre-stack depth migration,PSDM)是实现叠前地震反演的关键技术,PSDM是实现地质构造空间归位的一项 处理技术,已知精确速度模型的情况下,叠前深度偏移被认为是精确地获得复杂构造内部 映像最有效的手段,是一种真正的全三维叠前成像技术。但是,现有弹性波速度反演技术没 有综合考虑光滑约束和非光滑约束对于反演速度的影响,导致反演出的弹性波速度不准 确,对于复杂构造或速度横向变化较大的地震资料不能正确成像,不能有效修正陡倾地层 和速度变化产生的地下图像畸变,进而降低地震数据解释精度,不能有效指导实际生产。
技术实现要素:
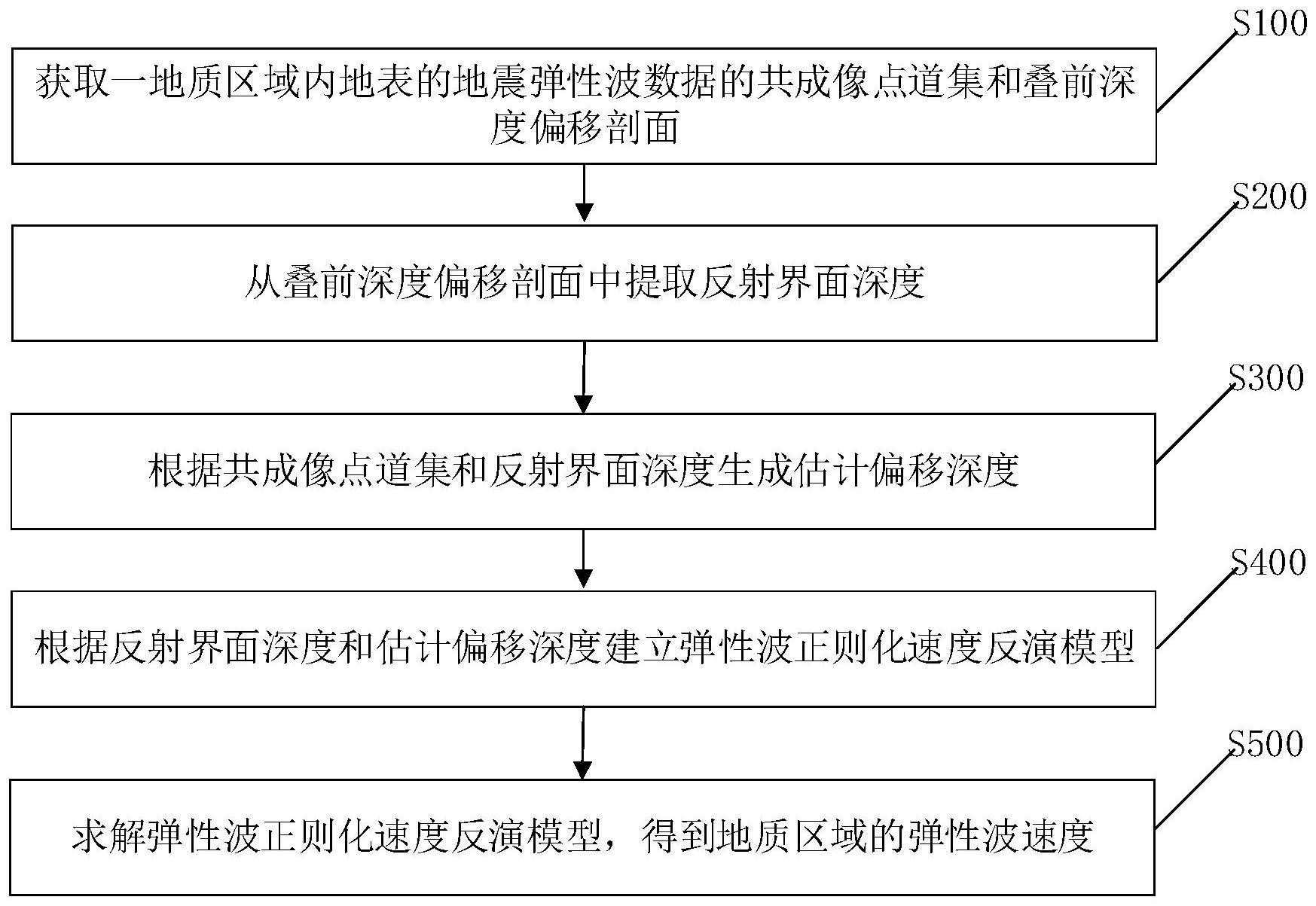
有鉴于此,本发明提供一种弹性波速度反演方法和装置、电子设备、计算机可读存 储介质,综合考虑光滑约束和非光滑约束对于反演速度的影响,精确反演出的弹性波速度, 对于复杂构造或速度横向变化较大的地震资料能正确成像,能有效修正陡倾地层和速度变 化产生的地下图像畸变,进而提高地震数据解释精度,有效指导实际生产,提高了生产效 率。 为了实现上述目的,本发明采用如下技术方案: 第一方面,提供一种弹性波速度反演方法,包括: 获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前深度偏移剖面; 从该叠前深度偏移剖面中提取反射界面深度; 根据该共成像点道集和该反射界面深度生成估计偏移深度; 根据该反射界面深度和该估计偏移深度建立弹性波正则化速度反演模型,该弹性 波正则化速度反演模型包括:光滑约束项和非光滑约束项; 7 CN 111596346 A 说 明 书 2/23 页 求解该弹性波正则化速度反演模型,得到该地质区域的弹性波速度。 进一步地,该根据该共成像点道集和该反射界面深度生成估计偏移深度,包括: 对该共成像点道集进行相似性扫描得到弹性波相干性衡量参数; 根据该弹性波相干性衡量参数和该反射界面深度计算该估计偏移深度。 进一步地,该共成像点道集的形状包括双曲部分和非双曲部分,该共成像点道集 的横坐标为偏移距, 根据该弹性波相干性衡量参数计算该估计偏移深度时,采用如下公式: 其中,zM(hk)为估计偏移深度,M为大于等于1的正整数,r1、r2分别为双曲部分和非 双曲部分的弹性波相干性衡量参数,hk为偏移距的一半,k为大于等于1的正整数, 为 反射界面深度。 进一步地,该弹性波正则化速度反演模型如下: 其中,J(Δλ)为目标函数,Δλ为模型更新量;A为(M1×M2)行N列的矩阵;矩阵A的元 素为偏移深度对模型参数的导数 xj为反演参数的横坐标位置,j代表反 射界面上的一坐标点;λi为第i个反演参数,i=1表示纵波速度,i=2表示横波速度,i=3表 示各向异性参数,该反演参数包括:弹性波速度和各向异性参数;M1为该共成像点道集的偏 移距的数量;M2为用于更新反演参数的共成像点道集的数量;P代表纵波;S代表横波;向量b 包含M1×M2个元素, 为不同偏移距估计偏移深度的平均值;α,β是正则 化参数;|| ||代表求范数,系数γ1、γ2、γ3是相应项的加权因子,矩阵R表示纵波和横波偏 移深度对纵横波速度导数的差值,y即纵波和横波偏移深度的差值, DTV(Δλ)为非光滑约束,是全变分的离散化,可近似为Mζ(Δλ), 其中,dt指与估计速度和各向异性参数相关的参数的均匀变化,其中,ζ为大于零 的常数; Γ(Δλ)为光滑约束,且 其中,负拉普拉斯变换离散形式的矩阵D定义为: 8 CN 111596346 A 说 明 书 3/23 页 进一步地,该求解该弹性波正则化速度反演模型,包括: 采用非线性化迭代算法,求解该弹性波正则化速度反演模型。 进一步地,采用非线性化迭代算法,求解该弹性波正则化速度反演模型,包括: 步骤1:设置初始模型更新量Δλ0、常数参数r、对称正定矩阵B0、迭代次数k=0; 步骤2:计算g(Δλk),其中,该g(Δλk)为J(Δλ)的梯度函数; 步骤3:判断||g(Δλk)||是否小于ξ×max{1,||g(Δλ0)||},其中ξ<0.1; 若是,执行步骤6,否则,执行步骤4; 步骤4:计算 其中,参数ωk表示计算的步长,满足以下两个条 件: J(Δλk ωkdk)≤J(Δλk) rωk[g(Δλk)]Tdk, 其中,参数r和 为常数且满足 步骤5:令k=k 1,并利用下式更新Bk,返回步骤2; 其中,I为单位矩阵; 步骤6:停止迭代,得到最终的反演参数。 进一步地,该获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前深 度偏移剖面,包括: 获取一地质区域内地表的地震弹性波数据; 对该地震弹性波数据进行叠前深度偏移处理得到共成像点道集和叠前深度偏移 剖面。 进一步地,该获取一地质区域内地表的地震弹性波数据,包括: 获取该地质区域内的地震炮集数据; 对该地震炮集数据进行预处理; 通过散度和旋度算子对预处理后的地震炮集数据进行波场分离,得到该地质区域 内地表的地震弹性波数据。 9 CN 111596346 A 说 明 书 4/23 页 进一步地,该对该地震弹性波数据进行叠前深度偏移处理得到共成像点道集和叠 前深度偏移剖面,包括: 利用初始速度模型对该地震弹性波数据进行叠前深度偏移处理,得到共成像点道 集; 沿着共成像点道集横轴方向进行求和,得到叠前深度偏移剖面。 第二方面,提供一种弹性波速度反演装置,包括: 数据获取模块,获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前 深度偏移剖面; 反射界面深度提取模块,从该叠前深度偏移剖面中提取反射界面深度; 估计偏移深度计算模块,根据该共成像点道集和该反射界面深度生成估计偏移深 度; 建模模块,根据该反射界面深度和该估计偏移深度建立弹性波正则化速度反演模 型,该弹性波正则化速度反演模型包括:光滑约束项和非光滑约束项; 模型求解模块,求解该弹性波正则化速度反演模型,得到该地质区域的弹性波速 度。 进一步地,该估计偏移深度计算模块包括: 相似性扫描单元,对该共成像点道集进行相似性扫描得到弹性波相干性衡量参 数; 深度计算单元,根据该弹性波相干性衡量参数和该反射界面深度计算该估计偏移 深度。 进一步地,该弹性波正则化速度反演模型如下: 其中,J(Δλ)为目标函数,Δλ为模型更新量;A为(M1×M2)行N列的矩阵;矩阵A的元 素为偏移深度对模型参数的导数 xj为反演参数的横坐标位置,j代表反 射界面上的一坐标点;λi为第i个反演参数,i=1表示纵波速度,i=2表示横波速度,i=3表 示各向异性参数,该反演参数包括:弹性波速度和各向异性参数;M1为该共成像点道集的偏 移距的数量;M2为用于更新反演参数的共成像点道集的数量;P代表纵波;S代表横波;向量b 包含M1×M2个元素, 为不同偏移距估计偏移深度的平均值;α,β是正则化参数;| | ||代表求范数,系数γ1、γ2、γ3是相应项的加权因子,矩阵R表示纵波和横波偏移深度对 纵横波速度导数的差值,y即纵波和横波偏移深度的差值, DTV(Δλ)为非光滑约束,是全变分的离散化,可近似为Mζ(Δλ), 10 CN 111596346 A 说 明 书 5/23 页 其中,dt指与估计速度和各向异性参数相关的参数的均匀变化,其中,ζ为大于零 的常数; Γ(Δλ)为光滑约束,且 其中,负拉普拉斯变换离散形式的矩阵D定义为: 进一步地,该模型求解模块包括: 初始参数设置单元,设置初始模型更新量Δλ0、常数参数r、对称正定矩阵B0、迭代 次数k=0; 梯度计算单元,计算g(Δλk),其中,该g(Δλk)为J(Δλ)的梯度函数; 判断单元,判断||g(Δλk)||是否小于ξ×max{1,||g(Δλ0)||},其中ξ<0.1; 模型更新量计算单元,当判断单元的判断结果为否时,计算 其中,参数ωk表示计算的步长,满足以下两个条件: J(Δλk ωkdk)≤J(Δλk) rωk[g(Δλ Tk)] dk, 其中,参数r和 为常数且满足 参数更新单元,令k=k 1,并利用下式更新Bk; 其中,I为单位矩阵; 反演参数输出单元,当判断单元的判断结果为是时,停止迭代,得到最终的反演参 数。 进一步地,该数据获取模块包括: 地震弹性波数据获取单元,获取一地质区域内地表的地震弹性波数据; 数据处理单元,对该地震弹性波数据进行叠前深度偏移处理得到共成像点道集和 叠前深度偏移剖面。 11 CN 111596346 A 说 明 书 6/23 页 进一步地,该地震弹性波数据获取单元包括: 勘探数据获取子单元,获取该地质区域内的地震炮集数据; 预处理子单元,对该地震炮集数据进行预处理; 波场分离子单元,通过散度和旋度算子对预处理后的地震炮集数据进行波场分 离,得到该地质区域内地表的地震弹性波数据。 进一步地,该数据处理单元包括: 叠前深度偏移处理子单元,利用初始速度模型对该地震弹性波数据进行叠前深度 偏移处理,得到共成像点道集; 求和子单元,沿着共成像点道集横轴方向进行求和,得到叠前深度偏移剖面。 第三方面,提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理 器上运行的计算机程序,该处理器执行该程序时实现: 获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前深度偏移剖面; 从该叠前深度偏移剖面中提取反射界面深度; 根据该共成像点道集和该反射界面深度生成估计偏移深度; 根据该反射界面深度和该估计偏移深度建立弹性波正则化速度反演模型,该弹性 波正则化速度反演模型包括:光滑约束项和非光滑约束项; 求解该弹性波正则化速度反演模型,得到该地质区域的弹性波速度。 第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序 被处理器执行时实现: 获取一地质区域内地表的地震弹性波数据的共成像点道集和叠前深度偏移剖面; 从该叠前深度偏移剖面中提取反射界面深度; 根据该共成像点道集和该反射界面深度生成估计偏移深度; 根据该反射界面深度和该估计偏移深度建立弹性波正则化速度反演模型,该弹性 波正则化速度反演模型包括:光滑约束项和非光滑约束项; 求解该弹性波正则化速度反演模型,得到该地质区域的弹性波速度。 本发明提供的弹性波速度反演方法和装置、电子设备、计算机可读存储介质,获取 一地质区域内地表的地震弹性波数据的共成像点道集和叠前深度偏移剖面;从该叠前深度 偏移剖面中提取反射界面深度;根据该共成像点道集和该反射界面深度生成估计偏移深 度;根据该反射界面深度和该估计偏移深度建立弹性波正则化速度反演模型,该弹性波正 则化速度反演模型包括:光滑约束项和非光滑约束项;求解该弹性波正则化速度反演模型, 得到该地质区域的弹性波速度。其中,综合考虑了光滑约束和非光滑约束对于反演速度的 影响,能够精确反演出的弹性波速度,提高地震成像的分辨率,对于复杂构造或速度横向变 化较大的地震资料能正确成像,能有效修正陡倾地层和速度变化产生的地下图像畸变,进 而提高地震数据解释精度,有效指导实际生产,提高了生产效率。 为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例, 并配合所附图式,作详细说明如下。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 12 CN 111596346 A 说 明 书 7/23 页 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在附图中: 图1A为本发明实施例中的服务器S1与客户端设备B1之间的架构示意图; 图1B为本发明实施例中的服务器S1、客户端设备B1及数据库服务器S2之间的架构 示意图; 图2是本发明实施例中的弹性波速度反演方法的流程示意图一; 图3示出了图2中步骤S300的具体步骤; 图4示出了图2中步骤S400的具体步骤; 图5示出了图2中步骤S100的具体步骤; 图6示出了图5中步骤S110的具体步骤; 图7示出了图5中步骤S120的具体步骤; 图8是本发明实施例中的弹性波速度反演装置的结构框图一; 图9示出了图8中估计偏移深度计算模块30的具体结构; 图10示出了图8中模型求解模块40的具体结构; 图11示出了图8中数据获取模块10的具体结构; 图12示出了图11中地震弹性波数据获取单元11的具体结构; 图13示出了图11中数据处理单元12的具体结构; 图14为本发明实施例电子设备的结构图。











