
技术摘要:
本发明涉及一种基于视觉引导的机器人轨迹跟踪控制方法,包括建立机器人视觉伺服控制系统;建立双目视觉统一测量场;利用双目视觉设备观测得到末端执行器坐标系相对于测量坐标系之间的位姿变换关系,并经过双目视觉测量场转换到机器人基坐标系;利用Kalman滤波器对观测 全部
背景技术:
近年来,工业机器人凭借其高度柔性化、低成本、高工作空间/占地面积比的优点, 在航空航天领域的应用越来越广泛,但航空航天制造业中的飞机大部件加工与装配往往需 要很高的精度,目前的机器人根据预设运动轨迹进行加工作业,由于机器人整体精度低,导 致加工精度和表面质量难以得到保证。所以需要一种机器人高精度轨迹跟踪控制方法。 公告号为CN106671103A的发明专利公开了一种铣削机器人控制方法及系统,采用 激光跟踪仪作为末端执行器位姿测量设备,采集铣削机器人的实时铣削轨迹数据,计算修 正参数,发送到铣削机器人对其进行控制。激光跟踪仪的激光头只能发出一束激光,依次扫 描末端执行器上安装的靶标球,获取所有靶标球的位置信息,可求解末端执行器的姿态,当 末端执行器运动时,需要考虑每个靶标球位置信息的采集时长,各靶标点位置信息的获取 存在时差,所以存在原理误差,测量频率受限,实时性差。不仅如此,在复杂的工况中,激光 一旦被遮挡就无法继续跟踪靶标球,不能继续测量。
技术实现要素:
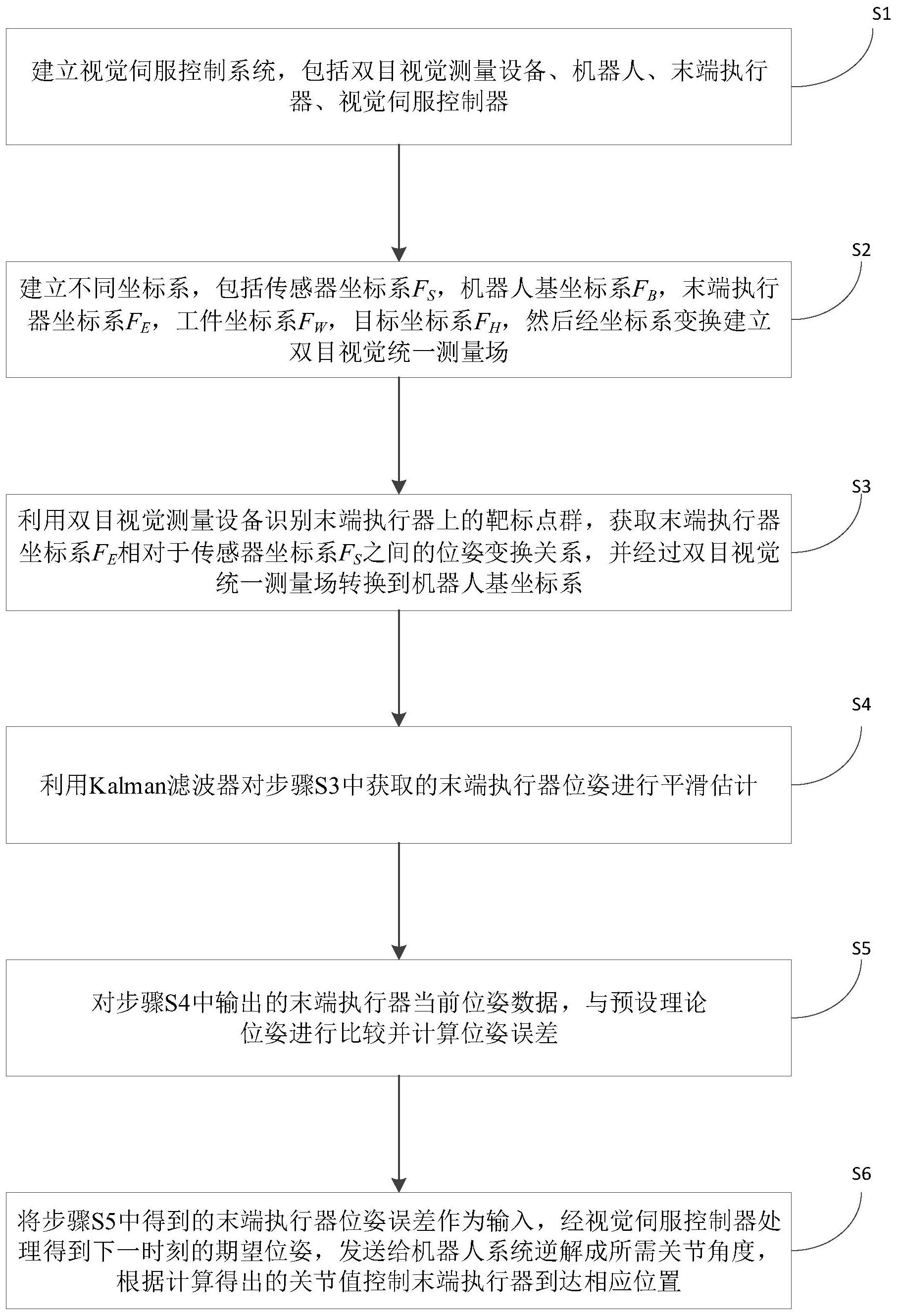
本发明所要解决的技术问题是针对上述现有技术的不足,提供一种基于视觉引导 的机器人轨迹跟踪控制方法。 为实现上述技术目的,本发明采取的技术方案为: 基于视觉引导的机器人轨迹跟踪控制方法,其中包括如下步骤: 步骤S1:建立视觉伺服控制系统,包括双目视觉测量设备、机器人、末端执行器、视 觉伺服控制器; 步骤S2:建立不同坐标系,包括传感器坐标系FS,机器人基坐标系FB,末端执行器坐 标系FE,工件坐标系FW,目标坐标系FH,然后经坐标系变换建立双目视觉统一测量场; 步骤S3:利用双目视觉测量设备识别末端执行器上的靶标点群,获取末端执行器 坐标系FE相对于传感器坐标系FS之间的位姿变换关系 并经过双目视觉统一测量场转换 到机器人基坐标系; 步骤S4:利用Kalman滤波器对步骤S3中获取的末端执行器位姿进行平滑估计; 步骤S5:对步骤S4中输出的末端执行器当前位姿数据,与预设理论位姿进行比较 并计算位姿误差; 步骤S6:将步骤S5中得到的末端执行器位姿误差作为输入,经视觉伺服控制器处 理得到下一时刻的期望位姿,发送给机器人系统逆解成所需关节角度,根据计算得出的关 节值控制末端执行器到达相应位置。 为优化上述技术方案,采取的具体措施还包括: 4 CN 111590594 A 说 明 书 2/9 页 进一步地,步骤S2中,将末端执行器的位姿转化到机器人基坐标系下的位姿: 其中,机器人基坐标系FB与工件坐标系FW在FS中分别表示为旋转矩阵 与 目 标坐标系FH在工件坐标系FW下的描述为 进一步地,步骤S3中,根据末端执行器坐标系的原点在靶标点群几何中心处、末端 执行器坐标系通过旋转矩阵Λ旋转一定角度、末端执行器坐标系通过平移向量q平移一定 距离、末端执行器坐标系做旋转Λ和平移q复合运动这四种情况,计算末端执行器相对于靶 标点群的不同位姿下的测量误差,选择测量误差最小的末端执行器坐标系相对于靶标点群 的位姿,优化靶标点群的布局,利用双目视觉测量设备识别末端执行器上的靶标点群,获取 末端执行器坐标系FE相对于双目视觉测量设备的测量坐标系FS之间的位姿变换关系 并 经过双目视觉测量场转换到机器人坐标系中。 进一步地,步骤S4中,根据双目视觉测量设备的采样周期、动态测量状态下各自由 度测量数据的标准差、机器人运动加速度标准差确定Kalman滤波器中的各项矩阵值; 根据双目视觉的采样周期t,确定机器人的状态转移矩阵F: 设机器人运动预测噪声协方差矩阵Qk: 统计动态测量状态下机床末端各个自由度测量数据的标准差,确定双目视觉的测 量噪声协方差矩阵: 5 CN 111590594 A 说 明 书 3/9 页 其中,状态转移矩阵F、机器人的预测噪声协方差矩阵Qk和双目视觉的测量噪声协 方差矩阵Rk构成Kalman滤波器中的各项矩阵值。 进一步地,步骤S5中,计算末端执行器位姿误差,包括直线轨迹运动和圆弧轨迹运 动,对于直线轨迹运动的末端执行器位姿误差为: ΔPR=[P R ]Tn d -[P Tc Rc] , Pn=(k(x2-x1) x1 k(y2-y1) y1 k(z2-z1) z1) 其中,Pn为实际位置Pc到直线上垂足; 对于圆弧轨迹运动的末端执行器位姿误差为ΔP=Pd-Pc,ΔR=Rd-Rc。 进一步地,步骤S6中,对机器人末端执行器的6个自由度分别基于模糊PID视觉伺 服控制器进行调整控制。 本发明的有益效果: 本发明基于视觉引导的机器人轨迹跟踪控制方法,通过双目视觉设备实时跟踪测 量机器人末端执行器的实际位姿,增加闭环回路形成闭环控制系统,由闭环反馈获得的位 姿误差通过视觉伺服控制器处理,得出下一时刻的期望位姿并发送给机器人系统逆解成所 需关节角度,根据计算得出的关节值控制末端执行器到达相应位置。本发明实现了利用双 目视觉测量设备对机器人末端执行器轨迹进行实时的调整,优化了靶标点群的布局,解决 了现有技术中机器人本体轨迹精度差以及利用激光跟踪仪对铣削轨迹实时调整存在的原 理性测量误差。本发明的有益效果经过空载运行试验验证和铣削试验验证,相比于使用机 器人直接铣削,使用本方法进行铣削轨迹跟踪控制后,直线误差降低了92%,圆弧误差降低 了91%。 附图说明 图1是本发明的工作流程图; 图2是本发明的机器人视觉伺服控制模型示意图; 图3是本发明的末端执行器相对于靶标点群的4种不同的位姿关系示意图; 图4模糊PID控制器原理图。











