
技术摘要:
本发明提供了一种具有分体式操作平台的掩护式锚杆台车,通过在可调节操作机构的操作平台上设有转动式锚杆钻机;支撑臂的伸缩臂一和伸缩臂二设在移动车体上;伸缩臂一的活塞杆杆端与操作平台连接;伸缩臂二的活塞杆端与伸缩臂一的底座端连接,用于实现操作平台在巷道内 全部
背景技术:
目前,煤矿及非煤矿山岩巷施工90%均采用钻爆法施工。巷道内通常布置有打眼 设备、支护设备和出渣设备等,多数采用两台及以上设备施工,由于巷道断面尺寸较小,支 护设备多数在打眼、出渣设备后部进行支护。现有的锚杆台车通常是操作人员在驾驶室中 操控锚杆钻机来进行锚杆施工,且进行锚杆、锚索等操作时,需要另外配置人员进行施工, 巷道施工时环境较差、噪音大,不能近距离精准操作,也不能实现对顶板的超前支护,导致 人员配合效果不好,工作效率低,安全事故较多,给施工带来很大安全隐患,亟待改进。
技术实现要素:
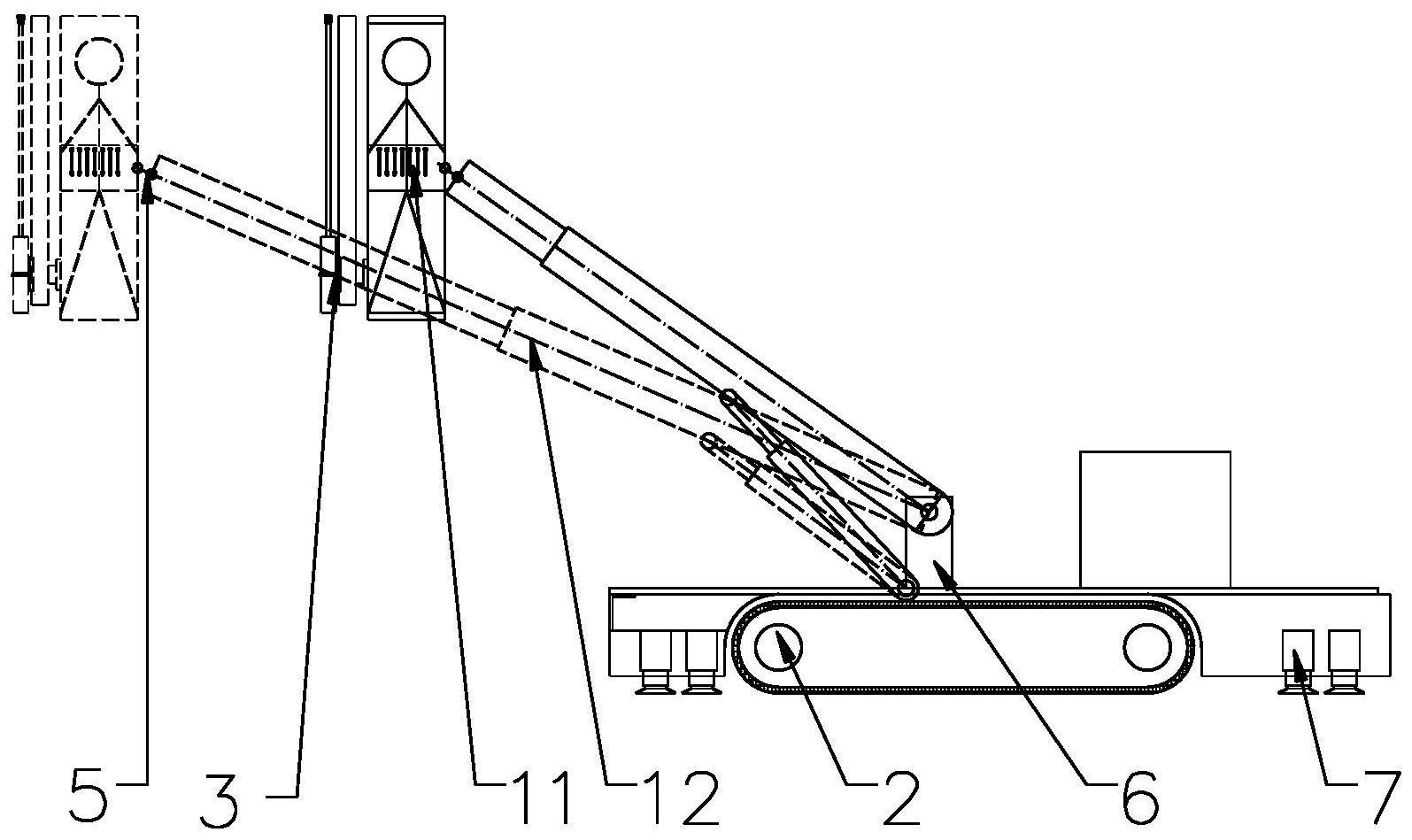
本发明的目的是提供一种具有分体式操作平台的掩护式锚杆台车,旨在旨在解决 现阶段狭窄巷道的施工操作不方便的技术问题与施工安全问题。 为实现以上目的,本发明通过以下技术方案予以实现: 一种具有分体式操作平台的掩护式锚杆台车,包括可调节操作机构和移动车体; 所述可调节操作机构包括操作平台和支撑臂;所述操作平台上还设有转动式锚杆钻机;所 述支撑臂包括伸缩臂一和伸缩臂二;所述伸缩臂一和伸缩臂二设在所述移动车体上;所述 伸缩臂一的前端与所述操作平台连接;所述伸缩臂二的前端端与所述伸缩臂一的底座端连 接,后端与移动车体连接,用于实现所述操作平台在巷道内三维空间的位置进行调节。 作为本发明的进一步改进,所述操作平台包括平台框、操作台、护顶棚和站人平 台;所述操作台设在所述平台框上;所述护顶棚设在所述平台框的顶部;所述站人平台设在 所述平台框的底部。 作为本发明的进一步改进,还设有支撑连接部;所述支撑连接部的一端与所述平 台框连接,另一端安装在所述伸缩臂一的前端。 作为本发明的进一步改进,所述转动式锚杆钻机的基座端转动连接在所述平台框 上。 作为本发明的进一步改进,所述可调节操作机构设有多个;多个所述可调节操作 机构均布置在台车上。 作为本发明的进一步改进,所述伸缩臂一的底座端安装在所述移动车体上的定位 驱动装置上;所述定位驱动装置安装在所述移动车体上;用于实现所述定位驱动装置带动 所述伸缩臂一在水平方向转动; 所述支撑臂二的底座端安装在所述定位驱动装置上。 作为本发明的进一步改进,所述护顶棚为框架栅条钢结构。 作为本发明的进一步改进,所述移动车体上还设有可旋转180°的设备司机室。 3 CN 111594048 A 说 明 书 2/6 页 作为本发明的进一步改进,所述可调节操作机构和所述移动车体均为尺寸相匹配 的长条状结构,且宽度方向的尺寸远小于长度方向的尺寸。 与现有技术相比,本发明的有益效果为: 1、本发明通过设置操作平台和支撑臂,来实现操作平台在巷道内三维空间的位置 进行调节,同时设置转动式锚杆钻机,可实现巷道断面的不同位置的锚杆安装,且设备操作 台跟随伸缩臂上下、左右和前后的移动,便于锚杆操作者近距离的观察情况,便于精准操 作;且在操作时,车体不需要在巷道中移动,减少车体的反复调节,省时省力,同时减少车体 晃动,更加安全可靠。 2、本发明通过设置伸缩臂一和伸缩臂二实现支撑结构的收缩,可实现操作平台在 巷道内的多方位移动定位,可实现操作人员在操作平台上在巷道内进行近距离的精准操 作,大大提高了提高了工作效率。 3、本发明通过设置操作平台用于实现操作人站立在所述站人平台上,且顶部设有 护顶棚来实现对人体的防护,操作人员在操作台上的操作按钮或手柄,保护操作人员安全, 不会被顶板掉落的岩石等砸伤,更加安全可靠。 4、本发明通过在操作平台设置栅格状护顶棚,金属网可以在护顶棚上铺设、绑扎, 并随护顶棚的上升,贴紧岩面;旋转式锚杆钻机可直接穿过护顶棚空顶处进行放置树脂药 卷、锚杆、锚索等操作的施工,在实现快速施工的同时,更加安全可靠。 5、本发明通过在移动车体上设有设备可旋转180°司机室,便于设备在巷道内移 动;设备前进或者后退,操作者都是面朝前方,避免操作视野错位的情况出现,大大提高行 车的安全性,且行走更加方便,操作视线好。 当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见,下面描述中的附图仅仅是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他的附图。 图1为本发明的两个可调节操作机构状态结构示意图; 图2为本发明的两个可调节操作机构状态结构示意图; 图3为本发明的三个可调节操作机构状态结构示意图; 图4为本发明的两个可调节操作机构状态结构示意图; 图5为本发明的操作平台结构示意图; 图6为本发明的操作平台结构示意图; 图7为本发明在巷道内的结构示意图; 图8为本发明在巷道运输时的状态结构示意图; 图9为本发明在巷道内操作的结构示意图; 图10为图9的俯视图; 图中标号说明: 1、可调节操作机构;11、操作平台;111、平台框;112、操作台;113、护顶棚;114、站 4 CN 111594048 A 说 明 书 3/6 页 人平台;12、支撑臂;121、伸缩臂一;122、伸缩臂二;2、移动车体;3、转动式锚杆钻机;4、巷 道;5、支撑连接部;6、定位驱动装置;7、液压支撑装置;8、掘进设备;9、司机室。











