
技术摘要:
本发明公开了涉及风力发电机的控制技术领域,特别是涉及一种基于PID控制的变桨距风力发电机控制系统。该系统包括传感器组、控制器、参数整定神经网络,包括:分别与变桨距风力发电机设备电性连接的敏感元件感应模块和控制模块,所述传感器组包括:转速传感器、振动传感 全部
背景技术:
目前市场上应用较为广泛的大功率风力发电机有定桨距失速型风力发电机、变桨 距定速风力发电机以及变桨距变速风力发电机,其中,定桨距失速型风力发电机多采用定 速运转模式变桨距风力发电机的桨叶是通过轴承与轮毂相连的,控制轴承即可以改变桨叶 的浆距角。所以与定桨距风力发电机相比,在风速高于额定值时,发电机的输出功率一直保 持稳定,具有在额定功率点以上运行时,输出功率较为平稳的优点。
技术实现要素:
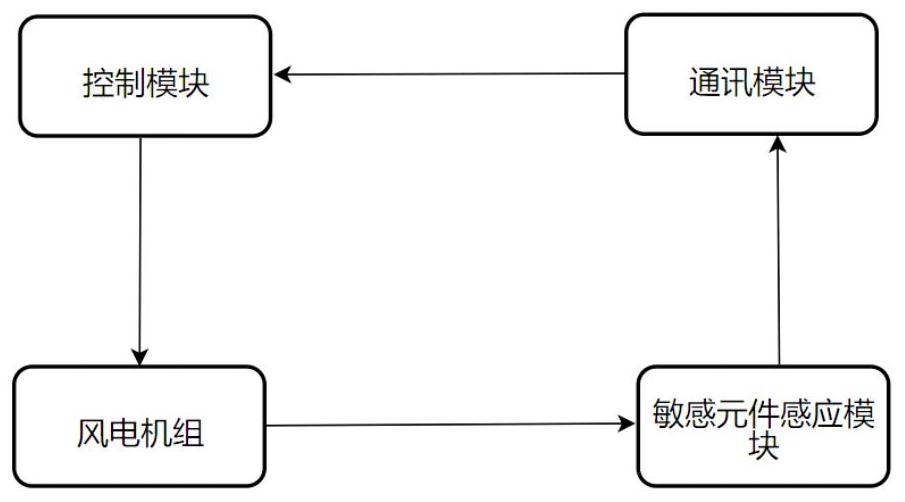
为确保变桨距风力发电系统所控制的桨叶的桨距角更加精确,提供一种基于PID 控制的变桨距风力发电机设备控制系统。 本发明技术方案为:一种变桨距风力发电机设备的桨距角控制系统,该系统包括 传感器组、控制器、参数整定神经网络,包括:分别与变桨距风力发电机设备电性连接的敏 感元件感应模块和控制模块,所述传感器组包括:转速传感器、振动传感器,所述敏感元件 感应模块通过通信模块与控制模块连接,并且所述控制模块内置有PID控制器,所述PID控 制器使用准对角递归神经网络进行多变量PID控制,PID的参数包括比例、积分、微分三个参 数,分别设为kp1、 ki1、kd1,所述PID控制器(u1)的控制算法为: 其中e1为输入与输出 的差,T 为采样时间。 在本发明一个较佳实施例中,所述变桨距风力发电机包括:桨叶、轴承、传动装置 和发电机,所述桨叶和轴承分别与所述控制模块电性连接。 在本发明一个较佳实施例中,所述敏感元件感应模块分别电连接到压力传感器、 位置传感器、激光传感器、视觉传感器。 在本发明一个较佳实施例中,所述压力传感器、位置传感器、激光传感器、视觉传 感器分别电连接到信号放大器和模数转换器。 本发明的有益效果是:采用准对角递归神经网络(QDRNN)进行多变量PID控制参数 整定, PID控制器实时调节PID参数,使系统更加稳定,工作质量提高。 附图说明 图1为本发明一种基于PID控制的变桨距风力发电机设备控制系统的实施例; 图2是PID控制器控制原理图; 其中,u1、u2为PID控制器,NN为QDRNN神经网络。 3 CN 111577541 A 说 明 书 2/2 页











