
技术摘要:
本发明涉及AGV技术领域,尤其是一种AGV及其轨道运动方法,包括包括AGV车体、舵轮、万向轮、识别装置、发送装置和定位装置,同时包括如下步骤;获取信息、建立坐标、预设终点、规划路线、路线调整,本发明相对于直角式轨迹绕过障碍物,紧贴障碍物圆弧式更能增加效率。
背景技术:
自动引导车(Automated Guided Vehicle,AGV)随着科技、经济的发展,被广泛应 用于各个行业,例如设备生产、物流分拣、食品加工等。AGV在解决停车难的问题也有着良好 的表现。采用AGV停车不仅可以提高停车效率。 针对现有的双舵轮激光导航停车AGV,车体较大,导航激光传感器一般只安装于车 头,当搬运车辆时为了尽量减少激光传感器被遮挡,往往都是倒车入接驳区,此时需要AGV 先行驶过车位,再倒车入库,则无法在紧贴墙面处设置车位,造成场地资源浪费。
技术实现要素:
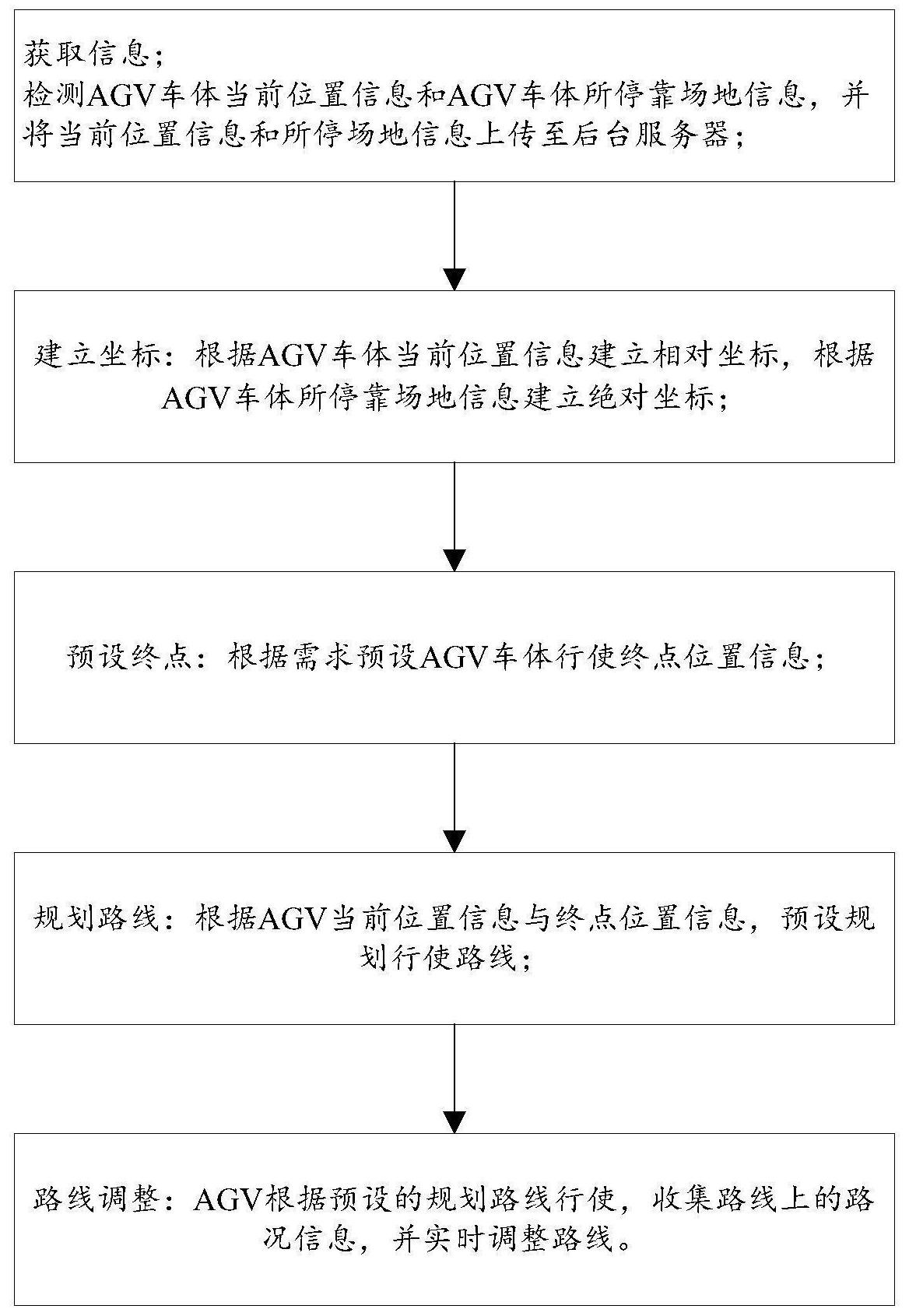
本发明的目的在于提供一种AGV及其轨道运动方法,以解决现有技术中AGV运行过 程中导引设备复杂,场地浪费和资源浪费的问题。 为实现上述目的,本发明提供如下技术方案:一种AGV,包括AGV车体,还包括舵轮、 万向轮、识别装置、发送装置和定位装置, 舵轮至少有2个,分别对称设置于AGV车体底部的前端与后端的中间位置,且所述 舵轮设置在AGV车体的中轴线上, 万向轮设置于AGV车体底部的两侧, 识别装置设置于AGV车体的车身部分的前后端与两侧, 发送装置和定位装置设置于AGV车体内。 优选的,所述识别装置包括摄像头、红外检测器、激光检测器和雷达中的一种或多 种组合。 优选的,所述发送装置为无线发射器,用于AGV车体运行数据的无线通讯。 优选的,所述定位装置包括车体检测器和处理器,车体检测器分别与AGV车体、舵 轮和外向轮数据连接,处理器与车体检测器连接,处理器对接的数据处理后通过发送装置 传输到后台服务器。 为实现上述目的,本发明还提供如下技术方案:一种AGV的轨道运动方法,其步骤 为: (1)获取信息:检测AGV车体当前位置信息和AGV车体所停靠场地信息,并将当前位 置信息和所停靠场地信息上传至后台服务器; (2)建立坐标:根据AGV车体当前位置信息建立相对坐标,根据AGV车体所停靠场地 信息建立绝对坐标; (3)预设终点:根据需求预设AGV车体行使终点位置信息; (4)规划路线:根据AGV车体当前位置信息与终点位置信息,预设规划行使路线; (5)路线调整:AGV车体根据预设的规划路线行使,收集路线上的路况信息,并实时 3 CN 111596657 A 说 明 书 2/7 页 调整路线。 优选的,步骤(1)中,获取AGV车体当前位置信息包括获取舵轮位置和万向轮位置 信息,舵轮中轴线的中心点为AGV车体的相对坐标的中心原点。 优选的,步骤(2)中,所停靠场地信息为预先上传至后台服务器,坐标原点为后台 服务器设置。 优选的,步骤(4)中,预设规划的行驶路线分为常规路线和最优路线。 优选的,所述的最优路线包括直线运动和通过自旋行驶AGV车体绕过行驶路线上 的障碍; 自旋行驶是后台服务器根据AGV车体、舵轮位置和规划路线,计算出AGV车体的旋 转中心,从而驱使AGV车体进行自旋行驶绕过障碍物。 优选的,根据步骤(5),通过AGC车体上的识别装置将行驶过程中的路况信息收集 反馈到后台服务器,根据实际路况进行调整路线或调整AGV车体运动方式。 与现有技术相比,本发明的有益效果是:提供的一种AGV及其轨道运动方法,首先 获取AGV车体位置,舵轮位置与万向轮位置信息,上传后台服务器,并根据当前信息找出AGV 车体中心原点,从而建立AGV车体当前相对坐标系,无论AGV车体停车初始状态如何都可以 建立相对坐标系,AGV车体停放的场地信息预先上传至后台服务器,这样AGV车体的状态位 置可不受停放位置的限制而实时监控,进而通过后台服务器进行路线规划,通过路线规划 识别行驶方向上的障碍物,并同步规划最优路线,由于对绕过障碍物AGV车体状态的限制, 所以通过自旋的方式绕过可节约时间,或要进入靠墙位置的库位,可通过半自旋的方式进 入,这样不仅能够节约时间而且可极大的利用停放场地进行规划库位。操作简单,更加人性 化,智能。 附图说明 图1为本发明的实施例整体结构流程图; 图2为本发明的实施例建立坐标示意图; 图3为本发明的实施例在绝对坐标下舵轮数据示意图; 图4为本发明的实施例AGV车体转弯模型示意图; 图5为本发明的实施例AGV车体运动参数示意图; 图6为本发明的实施例AGV车体绕过障碍物不旋转示意图; 图7为本发明的施例AGV车体绕过障碍物旋转180°示意图。











