
技术摘要:
本申请涉及智能导航技术领域,公开了一种到达时间的预估方法及装置,用于提高到达时间预估的准确性。方法包括:确定起点和终端之间的目标路线,以及所述目标路线包含的至少两个目标路段;获取所述目标路线的整体特征值,以及所述目标路段对应的局部特征值;针对每一个 全部
背景技术:
导航软件为用户提供规划路线的功能,并在用户驾驶过程中为用户进行沿路语音 引导。到达时间的预估(Estimated Time of Arrival,ETA)是地图软件中的一个基础功能, 其具体为针对地图上确定的一条路线和出发时间,给出走完这条路线所需要的时间。 目前对ETA的预估一般是利用机器学习算法,将整条路线的特征值,输入机器学习 算法中进行训练和预测。但是这种方式只考虑了路线的整体特征,而忽略了各路段的特征, 在一些情况下,例如路线的长度很长,且不同路段的路况差距较大,或者某一个路段极度拥 堵,对整条路线的到达时间影响巨大时,只考虑路线的整体特征会导致到达时间预估的准 确性较低。
技术实现要素:
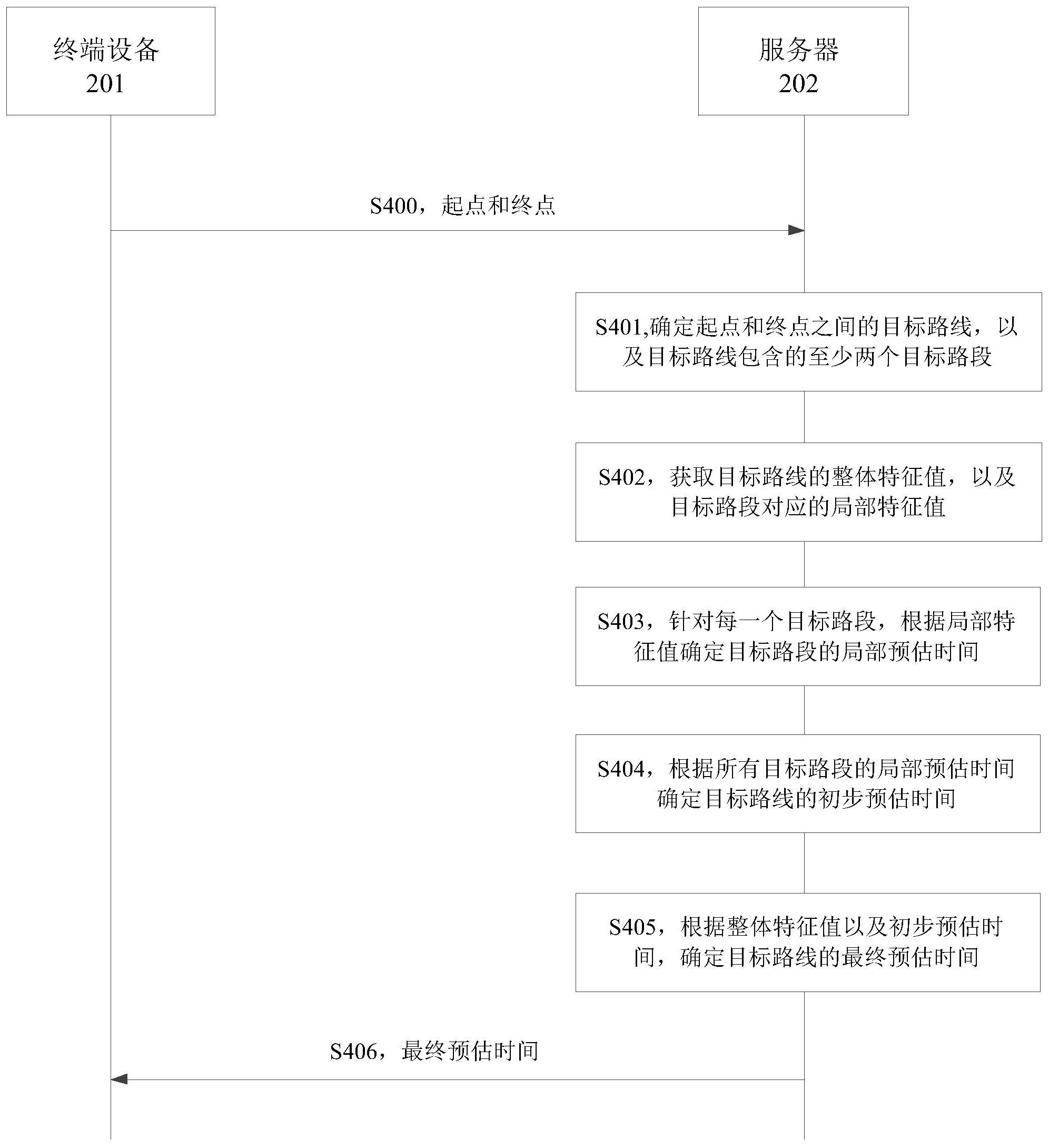
本申请实施例提供了一种到达时间的预估方法及装置,用于提高到达时间预估的 准确性。 根据本申请实施例的第一方面,提供了一种到达时间的预估方法,包括: 确定起点和终端之间的目标路线,以及所述目标路线包含的至少两个目标路段; 获取所述目标路线的整体特征值,以及所述目标路段对应的局部特征值; 针对每一个目标路段,根据局部特征值确定所述目标路段的局部预估时间; 根据所有目标路段的局部预估时间确定所述目标路线的初步预估时间; 根据所述目标路线的整体特征值以及初步预估时间,确定所述目标路线的最终预 估时间。 根据本申请实施例的第二方面,提供了一种到达时间的预估装置,所述装置包括: 确定单元,用于确定起点和终端之间的目标路线,以及所述目标路线包含的至少 两个目标路段; 获取单元,用于获取所述目标路线的整体特征值,以及所述目标路段对应的局部 特征值; 计算单元,用于针对每一个目标路段,根据局部特征值确定所述目标路段的局部 预估时间; 所述计算单元,还用于根据所有目标路段的局部预估时间确定所述目标路线的初 步预估时间; 所述计算单元,还用于根据所述目标路线的整体特征值以及初步预估时间,确定 所述目标路线的最终预估时间。 一种可选的实施例中,所述计算单元,具体用于: 将所有目标路段对应的局部预估时间进行加权计算,得到所述目标路线的初步预 5 CN 111582559 A 说 明 书 2/19 页 估时间。 一种可选的实施例中,所述计算单元,具体用于: 将所述目标路段的局部特征值输入已训练的第一预估模型,得到所述目标路段的 局部预估时间; 将所述目标路线的整体特征值和初步预估时间输入已训练的第二预估模型,得到 所述目标路线的最终预估时间。 一种可选的实施例中,所述确定单元,还用于: 确定所述目标路线对应的限定条件; 根据所述限定条件,确定对应的第一预估模型和第二预估模型。 一种可选的实施例中,还包括训练单元,用于根据以下方式训练得到所述第一预 估模型和所述第二预估模型: 获取训练样本,所述训练样本中包含有训练路线的整体特征值、所述训练路线包 含的训练路段的局部特征值、以及所述训练路线的实际到达时间; 将所述训练路线包含的训练路段的局部特征值输入所述第一预估模型,得到所述 训练路线的初步预估时间; 根据所述实际到达时间与所述初步预估时间计算第一损失函数; 将所述初步预估时间、所述训练路线的整体特征值输入所述第二预估模型,输出 所述训练路线的最终预估时间; 根据所述实际到达时间与所述最终预估时间计算第二损失函数; 当所述第一损失函数小于第一预设阈值,且所述第二损失函数小于第二预设阈值 时,确定所述第一预估模型对应的参数以及所述第二预估模型对应的参数。 一种可选的实施例中,所述第一损失函数与所述第二损失函数为不同类型的损失 函数。 一种可选的实施例中,所述第一预估模型和所述第二预估模型均为全连接神经网 络。 一种可选的实施例中,所述计算单元,还用于: 将所述目标路线的整体特征值和所述初步预估时间输入已训练的第二预估模型, 得到所述目标路线的预估时间方差。 一种可选的实施例中,所述训练单元,还用于: 将所述初步预估时间、所述训练路线的整体特征值输入所述第二预估模型,输出 预估时间方差; 根据所述实际到达时间、所述最终预估时间和所述预估时间方差,使用最大似然 估计的方法计算所述第二损失函数。 根据本申请实施例的第三方面,提供了一种计算设备,包括至少一个处理器、以及 至少一个存储器,其中,所述存储器存储有计算机程序,当所述程序被所述处理器执行时, 使得所述处理器执行本申请实施例提供的到达时间的预估方法的步骤。 根据本申请实施例的第四方面,提供了一种存储介质所述存储介质存储有计算机 指令,当所述计算机指令在计算机上运行时,使得计算机执行本申请实施例提供的到达时 间的预估方法的步骤。 6 CN 111582559 A 说 明 书 3/19 页 本申请实施例中,确定起点和终点之后,确定起点和终点之间的目标路线以及目 标路线包含的至少两个目标路段,获取目标路线的整体特征值以及目标路段对应的局部特 征值。针对每个目标路段,根据局部特征值确定该目标路段的局部预估时间,再根据所有目 标路段的局部预估时间确定目标路线的初步预估时间。这里,由于目标路线的初步预估时 间是根据每个目标路段的局部预估时间确定的,目标路段的局部预估时间又是根据局部特 征值确定的,因此局部预估时间是由对应目标路段的局部特征决定的,进而初步预估时间 是由所有目标路段的局部特征决定。最后,根据目标路线的整体特征值以及初步预估时间, 确定目标路线的最终预估时间。从而,计算最终预估时间的过程中,不仅考虑了路线的整体 特征,还考虑了每个路段的局部特征,因此,提高了预估时间的准确性,同时针对个别路段 比较特殊的情况,如局部拥堵,具有较高的准确度和效果,扩大了整个预估方法的适用范 围。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些 实施例。 图1a为现有技术中一种决策树的结构示意图; 图1b为本申请实施例中的一种全连接神经网络的结构示意图; 图1c为本申请实施例中的一个神经元的结构示意图; 图2为本申请实施例中的一种到达时间的预估系统的系统架构图; 图3为本申请实施例中的一种预估时长可达圈的示意图; 图4为本申请实施例中的一种到达时间的预估方法的流程图; 图5为本申请实施例中的终端设备的一种可能的界面示意图; 图6为本申请实施例中一种目标路线包含的目标路段的示意图; 图7为本申请实施例中利用两个算法模型进行ETA预估的流程示意图; 图8为本申请实施例中基于全连接神经网络预估到达时间的过程示意图; 图9为本申请实施例中利用全连接神经网络进行ETA以及方差预估的流程示意图; 图10为本申请实施例中一种到达时间的预估装置的结构方框图; 图11示出了本申请一个实施例提供的服务器的结构方框图。











