
技术摘要:
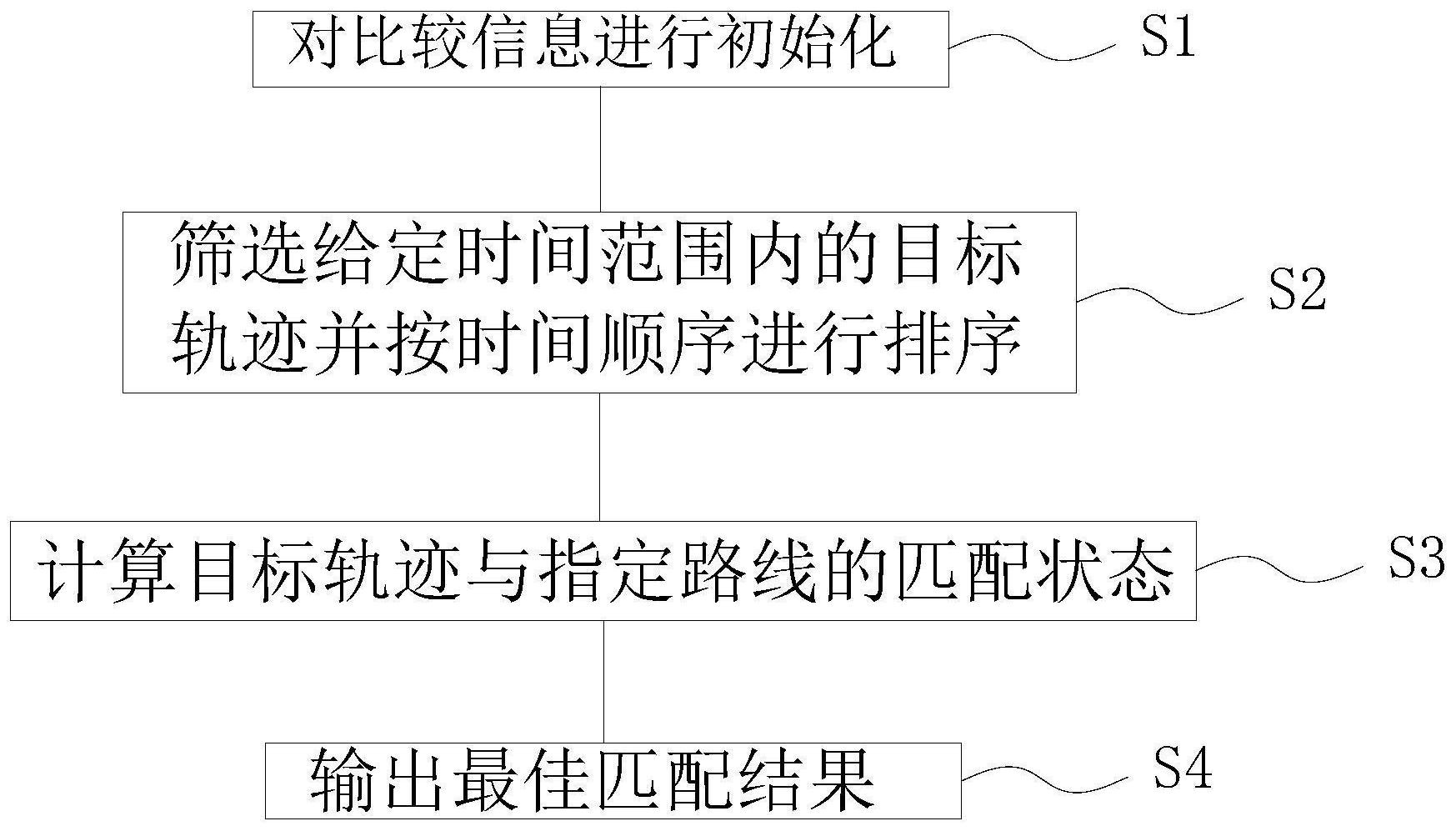
本发明公开一种用于找出目标轨迹与指定路线最长匹配段的分析方法,包括以下步骤:步骤S1,对比较信息进行初始化;步骤S2,筛选给定筛选范围内的目标轨迹,并按排序条件进行排序;步骤S3,计算目标轨迹与指定路线的匹配状态;步骤S4,输出目标轨迹与指定路线的最佳匹配 全部
背景技术:
目前,安防系统中多种监控设备会采集大量行为轨迹数据,该行为轨迹数据包括 人脸、MAC、IMSI及IMEI等数据;对于这些行为轨迹数据的一种应用场景是知道某个嫌疑目 标可能在某条路线上行进时,通过上述行为轨迹数据分析出与上述路线较为匹配的轨迹, 从而确定嫌疑目标,然而此应用场景需要解决给定的一条目标轨迹与上述路线的匹配系数 问题;由于给定的目标轨迹可能是从别处开始,行进一段路径后再进入指定路线,而且从指 定路线离开后可能还有一段轨迹,因此,计算目标轨迹与指定路线的匹配系数是不能考虑 整条目标轨迹的数据,需要从目标轨迹中找出与指定路线最长匹配的片段(即子轨迹),现 有技术中已有多种用于找出目标轨迹的最长匹配片段的分析方法存在,但这些分析方法都 比较复杂,不能有效的反应目标轨迹与指定路线的匹配程度,从而无法清楚获得目标轨迹 所属目标在指定路线上的活动情况。 因此,现有技术存在缺陷,需要改进。
技术实现要素:
本发明的目的是克服现有技术的不足,提供一种用于找出目标轨迹与指定路线最 长匹配段的分析方法。 本发明的技术方案如下: 一种用于找出目标轨迹与指定路线最长匹配段的分析方法,其特征在于,包括以 下步骤: 步骤S1,对比较信息进行初始化; 步骤S2,筛选给定筛选范围内的目标轨迹,并按排序条件进行排序; 步骤S3,计算目标轨迹与指定路线的匹配状态; 步骤S4,输出目标轨迹与指定路线的最佳匹配结果。 进一步地,所述步骤S1是指将初始(即未开始计算时)的最优匹配段的开始和结束 位置都设为-1,具体的,初始的最优匹配段的开始位置记为start_opt=-1,初始的最优匹 配段的结束位置记为end_opt=-1;初始的最优匹配段与指定路线匹配、不确定或不匹配的 轨迹点数都设为0,具体的,初始的最优匹配段与指定路线的匹配值记为n1_match_opt=0, 初始的最优匹配段与指定路线的不确定值记为n2_possible_opt=0,初始的最优匹配段与 指定路线的不匹配值记为n3_unmatch_opt=0,初始的最优匹配段与指定路线的匹配系数 记为e_opt=0;而当前处理的匹配段的开始和结束位置也都设为-1,具体的,当前处理的匹 配段的开始位置记为start_cur=-1,当前处理的匹配段的结束位置记为end_cur=-1;当 前处理的匹配段与指定路线匹配、不确定或不匹配的轨迹点数都设为0,具体的,当前处理 4 CN 111552761 A 说 明 书 2/5 页 的匹配段与指定路线的匹配值记为n1_match_cur=0,当前处理的匹配段与指定路线的不 确定值记为n2_possible_cur=0,当前处理的匹配段与指定路线的不匹配值记为n3_ unmatch_cur=0,当前处理的匹配段与指定路线的匹配系数记为e_cur=0; 其中,-1为无效值。 进一步地,所述步骤S2是指筛选给定的时间范围内的目标轨迹,并按时间顺序进 行排序。 进一步地,所述步骤S3包括以下步骤; 步骤S301,按时间顺序选取一条目标轨迹,并从头开始遍历所述目标轨迹; 步骤S302,计算所述目标轨迹的轨迹点与指定路线的匹配状态; 步骤S303,判断当前匹配段是否结束; 步骤S304,结束当前目标轨迹的遍历,并按时间顺序遍历下一条目标轨迹。 进一步地,所述步骤S302的实现方式是通过计算当前轨迹点与指定路线的垂直距 离来获取轨迹点与指定路线的匹配状态。 进一步地,所述步骤S302所述的匹配状态包括匹配、不确定和不匹配; 其中,当前轨迹点记为track_i,当前轨迹点的位置记为i;若当前轨迹点track_i 与指定路线的垂直距离小于或等于给定的距离D1,则判断当前轨迹点与指定路线匹配,并 更新匹配信息,包括匹配值n1_match_cur增加一,以及当前匹配段的结束位置end_cur的值 等于i,同时,若当前匹配段的开始位置为无效值,则设当前匹配段的开始位置为i,并结束 当前轨迹点的遍历,按时间顺序遍历下一个轨迹点;若当前轨迹点track_i与指定路线的垂 直距离大于给定的距离D1且小于或等于给定的距离D2,则判断当前轨迹点与指定路线不确 定,并更新不确定信息,包括不确定值n2_possible_cur增加一;若当前轨迹点track_i与指 定路线的垂直距离大于给定的距离D2,则判断当前轨迹点与指定路线不匹配,并更新不匹 配信息,包括不匹配值n3_unmatch_cur增加一。 进一步地,所述步骤S303的实现方式是通过当前匹配段的匹配值n1_match_cur、 不确定值n2_possible_cur和不匹配值n3_unmatch_cur计算当前匹配段与指定路线的匹配 系数e_cur来判断当前匹配段是否结束; 其中,若匹配系数e_cur大于给定的阈值,则判断当前匹配段还未结束,可继续判 断下一个轨迹点是否属于当前匹配段;若若匹配系数e_cur小于或等于给定的阈值,则判断 当前匹配段结束,并从下个轨迹点开始新匹配段的计算;若当前匹配段结束,则将当前匹配 段与最优匹配段的长度作比较;如果当前匹配段的长度(即当前匹配段的结束位置end_cur 减去当前匹配段的开始位置start_cur)大于最优匹配段的长度(即最优匹配段的结束位置 end_opt减去最优匹配段的开始位置start_opt),或者当前匹配段的长度等于最优匹配段 的长度,但当前匹配段与指定路线的匹配系数更高(即e_cur>e_opt),则更新最优匹配段的 信息,包括使用当前匹配段的开始位置start_cur的值替换最优匹配段的开始位置start_ opt的值,使用当前匹配段的结束位置end_cur的值替换最优匹配段的结束位置end_opt的 值,使用当前匹配段的匹配值n1_match_cur的值替换最优匹配段的匹配值n1_match_opt的 值,使用当前匹配段的不确定值n2_possible_cur的值替换最优匹配段的不确定值n2_ possible_opt的值,使用当前匹配段的不匹配值n3_unmatch_cur的值替换最优匹配段的不 匹配值n3_unmatch_opt的值,使用当前匹配段的匹配系数e_cur的值替换最优匹配段的匹 5 CN 111552761 A 说 明 书 3/5 页 配系数e_opt的值; 同时,清除当前匹配段的信息,包括将当前匹配段的开始和结束位置都设为无效 值,当前匹配段与指定路线匹配、不确定或不匹配的轨迹点数也都设为0。 进一步地,所述步骤S4的实现方式是根据步骤S3的计算结果输出目标轨迹与指定 路线的最佳匹配结果;进一步的,最佳匹配结果包括最佳匹配段的开始位置start_opt,最 佳匹配段的结束位置end_opt,最佳匹配段的匹配值n1_match_opt,最佳匹配段的不确定值 n2_possible_opt,最佳匹配段的不匹配值n3_unmatch_opt,最佳匹配段的匹配系数e_opt。 进一步地,所述匹配系数是基于匹配值n1、不确定值n2和不匹配值n3计算匹配参 数a和b来实现计算匹配系数;其中,匹配参数a=n2*1.0/(n1 n2),b=n1*1.0/(n1 n2 n3), 则匹配系数=2*(1-1/(1 exp(-5*a)))*(2/(1 exp(-8*b))-1)。 进一步地,所述匹配系数与所述匹配值n1、不确定值n2和不匹配值n3的关系满足 匹配值n1越大,匹配系数越高;不确定值n2和不匹配值n3越大,匹配系数越低;同时,不匹配 值n3比不确定值n2对匹配系数的影响更大。 采用上述方案,本发明具有以下有益效果: 本发明能够在大量实际轨迹数据中快速分析出目标轨迹与指定路线的最优匹配 段,分析难度低,效率高,能有效的反应目标轨迹与指定路线的匹配程度,便于安防工作人 员清楚获得目标轨迹所属目标在指定路线上的活动情况。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1为本发明用于找出目标轨迹与指定路线最长匹配段的分析方法的流程示意 图; 图2为本发明步骤S3的流程示意图。 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











