
技术摘要:
本发明公开了一种基于蓝牙的室内停车场定位与导航方法。该方法首先部署适量蓝牙基站,检测并记录室内各点位的蓝牙信号,得到特定停车场内的蓝牙指纹库,移动终端通过自身蓝牙模块获取蓝牙信号,通过KNN算法与指纹库进行匹配得到定位的初步结果,再对初步结果进行卡尔曼 全部
背景技术:
目前室内定位主要有低功耗蓝牙定位、WIFI定位、UWB定位、视觉定位等技术,其中 WIFI定位在采用传统定位算法的情况下,定位精度低、结果误差大,UWB和视觉定位虽然精 度高,表现相对稳定,但是设备成本高昂。相比而言,蓝牙定位所采用的iBecon基站的显著 优势是功耗相对较低,同时,如果部署一张专用的定位的网络对系统的可靠性而言要比兼 顾数据传输和定位的WIFI网络要健壮,稳定性要好。蓝牙定位也可以利用手机和其他设备 的蓝牙功能,省去了部分终端的部署。相应地,基于蓝牙技术的产品市场需求正在日益扩 大,应用也越来越广泛。 通过建立蓝牙信号强度RSSI指纹库以进行指纹匹配定位是目前蓝牙定位的主要 方法之一。位置指纹定位是根据不同位置接收到的信号强度向量,建立相应的位置指纹,通 过实时采集的信号强度与信号空间中储存的信号向量,根据一定的匹配算法实现定位。该 算法能够在一定程度上减少多径效应的影响,增强抗干扰能力。但是蓝牙信号易受环境干 扰的问题依旧存在,例如在停车场中,信号容易受到往来汽车、行人等干扰,影响信号传播, 产生噪声干扰,使定位精度降低。专利申请公布号CN110351660A所示双步指纹匹配方法通 过自适应方法减小匹配指纹库中指纹信息个数来解决大室内场景下的指纹匹配实时性较 差的问题,着重于定位算法效率的提升,而无法提高定位精度。
技术实现要素:
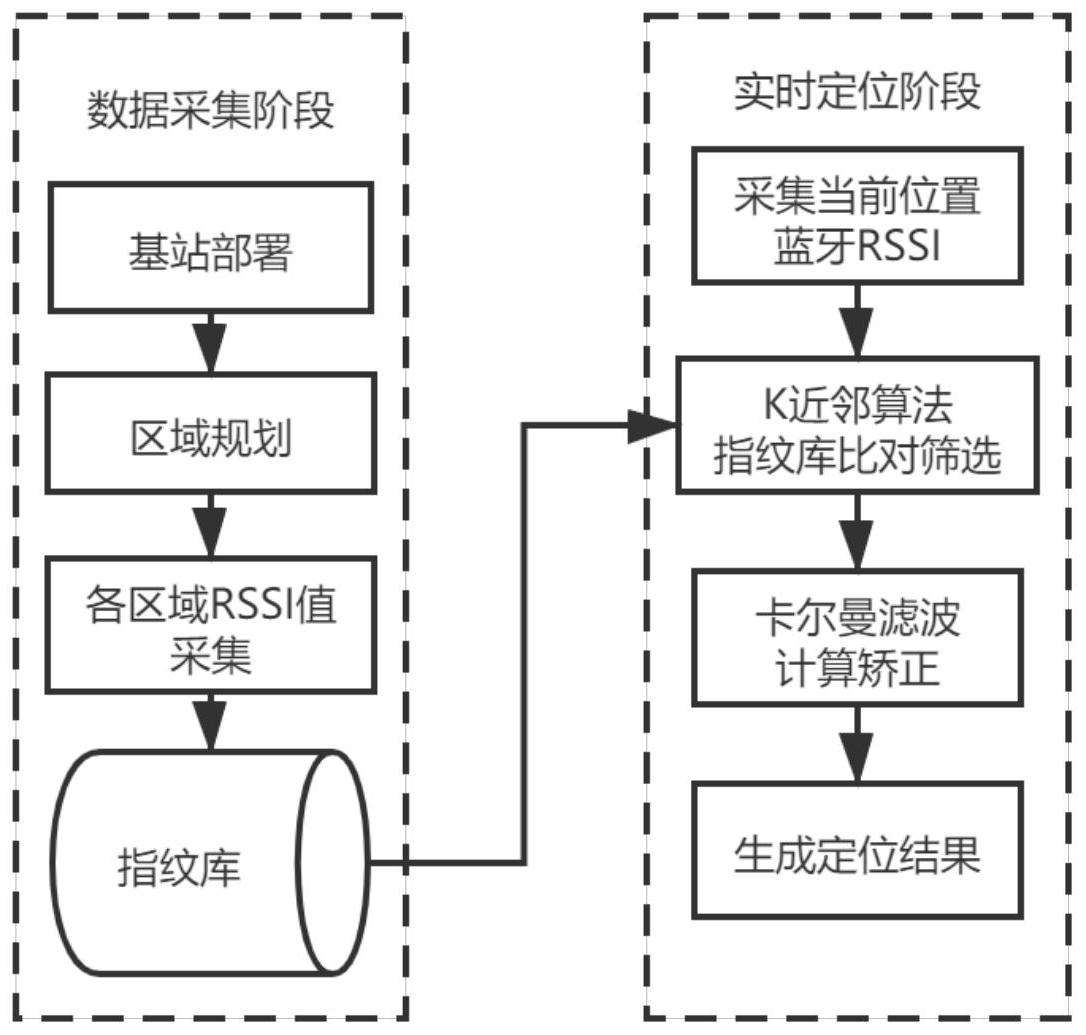
本发明的目的在于提供一种基于蓝牙的室内停车场定位与导航方法,通过卡尔曼 滤波减小信号干扰带来的影响,以提高蓝牙定位的精度,使导航路线更精确。 实现本发明目的的技术解决方案为: 一种基于蓝牙的室内停车场定位与导航方法,其特征在于,包括以下步骤: 步骤1、对停车场部署多个蓝牙基站,测量各位置各基站的蓝牙信号强度,即RSSI 值,整理记录成蓝牙指纹库; 步骤2、将当前位置的RSSI值向量通过K近邻算法与指纹库中的数据进行比对,筛 选出最符合的k个定位点,计算当前位置与各定位点RSSI值向量的差距disi,选取disi值最 小的k个定位点,计算其坐标平均值作为初步定位坐标; 步骤3、将初步定位结果进行卡尔曼滤波计算,更新卡尔曼滤波参数,得到当前定 位的最终定位坐标; 步骤4、根据当前位置选取最近空车位作为导航终点:在可行路径上每隔相同距离 设置相连节点,以当前位置的最近节点为起点,进行宽度优先搜索,直至到达与空停车位相 邻的节点,得到相隔节点数最少,即路径最短的空车位; 4 CN 111726757 A 说 明 书 2/4 页 步骤5、计算最短路径,并通过此路径导航到路径最短的空车位。 本发明与现有技术相比,其显著优点是: 通过RSSI指纹进行K最近邻定位算法的基础上,增加卡尔曼滤波对RSSI信号中噪 声的过滤,以提高定位精度,并用于导航。以增加少量的定位时间为代价,取得精度更高的 定位结果。 附图说明 图1是本发明定位算法流程图。 图2是本发明K近邻算法得到初始定位结果的流程图。 图3是卡尔曼滤波计算流程图。 图4是停车场路径节点设置示意图。











